
Fターム[2F065FF04]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 画像計測、写真計測 (6,129)
Fターム[2F065FF04]の下位に属するFターム
Fターム[2F065FF04]に分類される特許
161 - 180 / 4,968
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
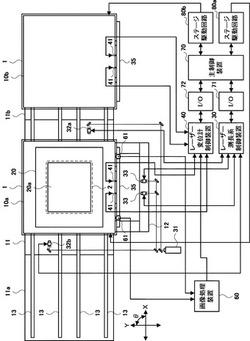
【課題】安価な構成で、チャックのθ方向の傾きを精度良く検出して、基板のθ方向の位置決めを精度良く行う。
【解決手段】第1のステージに搭載されY方向(又はX方向)へ移動する第2のステージに第2の反射手段(35)を取り付け、第2の反射手段(35)のθ方向の位置ずれを検出する。チャック(10a,10b)に複数の光学式変位計(41)を設け、複数の光学式変位計(41)により、第2のステージに取り付けた第2の反射手段(35)までの距離を複数箇所で測定する。第2の反射手段のθ方向の位置ずれの検出結果に基づき、複数の光学式変位計(41)の測定結果から、チャック(10a,10b)のθ方向の傾きを検出し、検出結果に基づき、第3のステージによりチャック(10a,10b)をθ方向へ回転して、基板(1)のθ方向の位置決めを行う。
(もっと読む)
薄膜製造装置のアライメント調整方法、薄膜製造装置、該薄膜製造装置により製造した電気機械変換膜、電気機械変換素子、液滴吐出ヘッド及び液滴吐出装置

【課題】低コスト化を図れる導膜製造装置、製造した電気機械変換素子、液滴吐出装置を提供する。
【解決手段】第1のアライメント調整工程では着弾位置251をカメラ205で捕捉し着弾位置251がカメラ205の撮影撮影基準位置252に一致するように基板又は液滴吐出ヘッド201を相対的に移動する。第2のアライメント調整工程ではレーザレッドによってレーザ光を照射して照射跡を形成し照射跡をカメラ205で捕捉し照射跡がカメラ205の撮影撮影基準位置252に一致するように基板又はレーザヘッドを相対的に移動する。第3のアライメント調整工程では基板上に予め形成されているアライメントマークを撮像手段205で撮影したアライメントマークの形状に基づいて基板の向きを検知して基板の向きの調整を行いアライメントマークを撮像手段205の撮影基準位置に一致するように基板を移動することで基板の組付け位置の調整を行う。
(もっと読む)
エゴモーション概算システムおよび方法
【課題】エゴモーション概算システムおよび方法の提供。
【解決手段】エゴモーション概算システムを利用してエゴモーションパラメータを決定するためのコンピュータ実施方法であって、第1の画像フレームおよび第2の画像フレームを取得することと、第1の画像フレームの第1の部分を選択して第1のサブ画像を取得し、かつ第2の画像フレームの第2の部分を選択して第2のサブ画像を取得することと、第1のサブ画像および第2のサブ画像に変換を実行して、それぞれ、第1の透視画像および第2の透視画像を取得することと、第2の透視画像を反復的に調整して複数の調整した透視画像を取得することと、第1の透視画像と複数の調整した透視画像との個々の差異それぞれに対応する複数の差分値を決定することと、複数の差分値のうちの1つに対応する、エゴモーションパラメータに関する並進ベクトルを決定することと、を含む、方法。
(もっと読む)
形状測定装置、形状測定方法、構造物製造システム及び構造物の製造方法
【課題】測定対象物の形状を高精度で測定できる形状測定装置、形状測定方法、及び構造物の製造方法を提供すること。
【解決手段】被測定物に所定の光量分布を有するパターン光を形成する照明部と、光が被測定物に照射される照射方向と異なる方向から被測定物に照射されたパターン光の像を撮像する撮像素子を含む撮像部と、像の撮像信号を評価する評価部と、評価部の評価結果に基づき撮像部の撮像結果に対して所定の処理を行うことで被測定物の位置情報を算出する処理部と、を備える形状測定装置に関する。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】個々の物品1の基材10上に、基材とは異なる光学反射特性を有し、かつ、異色の微細物質12、並びに特徴的な図案及び形状等を有する微細物質をランダムに配置しておく。また個々の物品をスキャナ等により光学的に読み取り、所定の画像処理を施して微細物質の特徴点及びその特徴点における色情報に関する特徴量を抽出し、基準特徴量データとして記憶部に記憶しておく。識別対象となる物品を上述の読み取りの際と同様の手法で読み取り、同様の画像処理を施して微細物質の対象物特徴量データを抽出する。そして、抽出した対象物特徴量データと記憶されている基準特徴量データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
検査装置、検査方法及び検査プログラム
【課題】検査対象毎に検査パラメータを設定する必要がなく、半田付けの実装の良否を適切に判定すること。
【解決手段】複数の半田接合部を含む画像から、半田接合部を含む部分画像を複数抽出する抽出部と、抽出部により抽出された複数の部分画像を用いて、半田接合部の実装の良否を判定する基準となる基準画像を作成する作成部と、作成部により作成された基準画像と各部分画像とを比較する比較部と、比較部による比較結果に基づき、各半田接合部の実装の良否を判定する判定部と、を備える。
(もっと読む)
ロボットシステム
【課題】スリット光の予測投影領域を最適化することによってロボットによるワークの取出作業の速度および精度を向上させることができるロボットシステムを提供すること。
【解決手段】実施形態の一態様に係るロボットシステムは、投影部と撮像部と予測投影領域決定部と投影位置検出部とロボットとを備える。投影部は、ワークが載置される載置領域へスリット光を投影して所定の移動方向へ移動させる。撮像部は、ワーク上を移動するスリット光を順次複数回撮像する。予測投影領域決定部は、撮像された画像を移動方向と交差する交差方向へ横断し、画像における交差方向の中央に近いほど移動方向と平行な方向の長さが長くなるように、画像におけるスリット光の予測投影領域を決定する。投影位置検出部は、予測投影領域の中からスリット光の投影位置を検出する。ロボットは、検出された投影位置に基づいてワークを把持する。
(もっと読む)
パターンの描画条件導出方法及びパターン描画装置
【課題】パターンのムラ欠陥の生じない描画条件を導出し、製品の歩留まりを向上する。
【解決手段】基板上に描画するパターンのムラ欠陥が発生しない描画条件を導出する方法であって、基板上に形成するパターンを生成するパターン情報生成工程S1と、パターンに対して、複数の描画項目の組み合わせによる、2通り以上の描画条件を設定する描画条件設定工程S2と、前記生成されたパターンを抜き取り、補助基板上に、前記各描画条件のもとに、矩形領域をなす補助パターンを形成する補助パターン描画工程S3と、補助基板に対して照明光を入射し、補助パターンから生じる回折光を光電変換素子にて画像として取得し、ムラ欠陥に関するムラ評価値とムラ発生周期とを求めことにより、複数の描画条件の中からムラ欠陥が生じない描画条件を導出する描画条件判定工程S4とを含むパターンの描画条件導出方法である。
(もっと読む)
半導体レーザ素子の端面角度測定方法
【課題】半導体レーザ素子の共振端面の角度を容易に且つ精度良く測定することができる方法を提供する。
【解決手段】光導波路の光導波方向と交差する方向に並んだ複数の半導体レーザ素子を含む半導体レーザバー2を、共振端面2aが所定の基準線21bに沿うようにステージ21の基準面21a上に固定し、半導体レーザバー2の複数の半導体レーザ素子の共振端面からレーザ光Laを出射させ、レーザ光LaのFFPを測定し、FFPのピーク位置により定まるレーザ光Laの出射方向と、所定の基準線21b及び基準面21aとの相対角度から、半導体レーザ素子の共振端面の角度を算出する。
(もっと読む)
現在位置算出装置および現在位置算出方法
【課題】本発明は、誤差の累積を抑制し、目標物になりそうなものがない単調な道路でも適切に真の現在位置を算出できる現在位置算出装置および現在位置算出方法の提供を目的とする。
【解決手段】本発明にかかる現在位置算出装置は、自車17の現在位置における2次元画像である観測画像が入力される観測画像入力部1と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部9と、観測画像と、記憶されている現在位置である仮現在位置に対応する参照画像とを、画像マッチングにより照合する照合部としてのピクセルパターン照合部5と、ピクセルパターン照合部5における照合結果に基づいて、自車17の真の現在位置を算出する現在位置算出部6とを備える。
(もっと読む)
欠陥検査装置および欠陥検査方法
【課題】基板上のパターンに損傷を与えることなく欠陥検査を行うことができる欠陥検査装置を提供すること。
【解決手段】実施形態の欠陥検査装置は、半導体基板を測定光学系によって表面観察し、観察結果に基づいて前記半導体基板の欠陥検査を行う基板検査部を備えている。また、前記欠陥検査装置は、前記測定光学系のうち前記表面観察を行う際に前記半導体基板の表面に近接する底部近傍を撮像し、撮像した画像である第1の撮像画像を用いて前記底部近傍の状態検査を行う測定光学系検査部を備えている。前記測定光学系検査部は、前記基板検査部が前記半導体基板の欠陥検査を行っていない間に、前記底部近傍の状態検査を行う。また、前記測定光学系検査部は、前記状態検査の基準となる基準画像と、前記第1の撮像画像と、を比較し、比較結果に基づいて、前記底部近傍の状態検査を行う。
(もっと読む)
物品認識装置における照明の設定値設定方法および物品認識装置
【解決手段】ボンディング装置を構成する物品認識装置は、基板のバンプに照明光を照射する第1照明と、該第1照明とは異なる角度から上記バンプに照明光を照射する第2照明と、上記バンプで反射した上記照明光の反射光を撮影する第1撮影手段とを備えている。上記第2照明の輝度を固定したまま、第1照明の輝度を変化させて(S3)、上記第1撮影手段が撮影した画像のうち、バンプが最も多く認識された画像を撮影した際における第1照明の輝度を記憶する(S7)。続いて第1照明の輝度を上記記憶した輝度で固定したまま、第2照明の輝度を変化させて(S9)、上記第1撮影手段が撮影した画像のうち、バンプが最も多く認識された画像を撮影した際における上記一方の照明の輝度を記憶する(S13)。
【効果】照明の設定値の設定を容易にかつ安定して行うことができる。
(もっと読む)
偏光画像による車両位置検知方法及びシステム
【課題】偏光画像による車両位置検知方法及びシステムを提供する。
【解決手段】かかる方法は、偏光カメラにより路面の偏光画像を取得する段階と、取得された前記偏光画像中の路面及び路肩の違いに基づいて、前記偏光画像中の路肩を算出し、算出された路肩間の部分を路面部分と決定する段階と、前記偏光画像における車両の車輪の画素値と実際の路面の画素値との顕著な差に基づいて、決定された前記路面部分における少なくとも一つ以上の推定車両底部を識別する段階と、識別された前記推定車両底部の各々に対し、前記偏光画像における車両の輪郭の画素値と背景の画素値との差に基づいて、対応する推定車両底部による推定車両位置を取得する段階を含む。
(もっと読む)
マーカ、マーカ検出方法および装置
【課題】対象物が太陽光で照らされた屋外のように、多様性や変化に富んだ環境下において、画像中の対象物を10画素以下の少ない画素から、誤認することなく検出することができるマーカ、マーカ検出方法および装置を提供する。
【解決手段】対象物1の表面に取り付けたマーカ10であって、乱反射材からなる内層12と、内層の外側に取り付けられた偏光フィルムからなる外層14とを有し、外光2を乱反射し、地表に対し水平、垂直、又は斜めの偏光3に変換して放射する。
(もっと読む)
面法線計測装置、面法線計測システム及び面法線計測プログラム
【課題】物体表面の反射特性に鏡面反射成分を含むことを必要とせず、物体表面までの距離の計測も必要とせずに面法線を計測する。
【解決手段】面法線計測システム1は、ガイドレールRx,Ryに沿って、互いに直行する平面内を移動して物体OBJに対する照明方向を変化させる照明装置30と、物体OBJを撮影する撮影装置40と、撮影装置40によって撮影された画像に基づいて物体OBJの表面の面法線を計測する面法線計測装置10とを備える。面法線計測装置10は、物体OBJの画像を2値化し、画素ごとに、照明方向と明暗とが対応付けられた陰影ベクトルを作成し、予め形状が既知の参照物体について作成した参照陰影ベクトルと面法線とが対応付けられたデータベースを参照して、物体OBJの陰影ベクトルと最も類似する参照陰影ベクトルに対応付けられた面法線を、その画素における面法線と推定する。
(もっと読む)
距離測定装置及び軌道周辺支障物検出装置
【課題】太陽光などの投光波長以外の光を極限まで制限して、投光波長のみを受光できるようにする。
【解決手段】干渉膜を使った平面板の干渉フィルタを用いて広い視野の検出手段を構成すると、平面板の干渉フィルタへの入射角に応じて透過帯域の移動が起こり、所望の信号強度を得ることが困難となる。この発明は、干渉フィルタの形状を球面状にして全視野の受光光線を干渉フィルタの入射面に対して垂直に入射するようにして、透過帯の移動をなくし、所望の信号強度を得るようにした。また、受光レンズの第一主点と球面状干渉フィルタの球面中心とを一致させて配置することにより、干渉フィルタへ入射する反射光の入射角を0°にして透過帯域が変化しないようにした。
(もっと読む)
大塊搬送物検知システム
【課題】大塊搬送物を好適に検知することが可能な大塊搬送物検知システムを提供する。
【解決手段】大塊ずり検知システム1は、ずり2を搬送するベルト12を有するベルトコンベア10と、ベルト12上のずり2に光を照射する照明部30と、光が照射されたずりを時間を空けて複数回撮影する撮影部40と、ずりに一方から光が照射された時刻t1に撮影された第一の画像とベルト12の走行によってずりに他方から光が照射された時刻t2(>t1)に撮影された第二の画像とに基づいて、大塊ずりを検知する大塊ずり検知部53bと、を備え、大塊ずり検知部53bは、ベルト12の速度をvとしたとき、v・(t2−t1)に基づいて第一の画像及び第二の画像の位置合わせを行って第一の画像及び第二の画像の論理積画像を生成し、論理積画像から大塊ずりを検知する。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置のギャップ制御方法、及び表示用パネル基板の製造方法
【課題】基板の一面を複数のショットに分けて露光する際、ショット毎に、マスクと基板とがより平行な状態でギャップ合わせを行って、露光精度を向上させる。
【解決手段】マスクホルダ20とチャック10とを相対的にZ方向へ移動及びチルトする複数のZ−チルト機構30と、マスク2と基板1とのギャップを複数箇所で測定する複数のギャップセンサー30とを設ける。予め露光した基板のパターンを測定して、各ギャップセンサー40の測定点におけるショット毎のオフセット値を決める。ショット毎に、各ギャップセンサー40の測定値を、各測定点におけるショット毎のオフセット値で補正し、補正後の補正値に基づいて、複数のZ−チルト機構30によりマスク2と基板1とのギャップ合わせを行う。
(もっと読む)
位置検出装置、プログラム
【課題】周辺の建物の有無やレイアウトの変更等にかかわらず、簡便に詳細な位置情報を取得する。
【解決手段】位置検出装置が、所定の視野角に表示画像を表示する表示装置によって表示される表示画像と、予め設置された表示装置によって表示画像が表示される視野角方向の位置を示す位置情報とを対応付けて記憶し、表示装置によって表示された表示画像が撮像された撮像画像の入力を受け付け、入力された撮像画像に含まれる表示画像に対応付けられた位置情報を読み出す。
(もっと読む)
データ解析装置、データ解析方法、及びプログラム
【課題】地物表面の三次元形状を表す点群データに基づいて地物の壁面を自動的に検出する。
【解決手段】部分空間設定手段20は解析の対象空間を垂直面で分割して、柱状の複数の部分空間を設定する。部分空間選択手段22は部分空間のうち予め設定した閾値以上の高低差を有する点群を含むものを注目部分空間として選択する。ブロック空間設定手段24は注目部分空間を水平面で分割して、縦に積み重なる複数のブロック空間を設定する。水平面内探索手段26はブロック空間ごとに、水平面内の線分のうち、水平面に射影された点群が予め設定した基準以上に近傍に集まるものを探索して水平面内における壁面の位置と定める。
(もっと読む)
161 - 180 / 4,968
[ Back to top ]