
Fターム[2F065FF04]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 画像計測、写真計測 (6,129)
Fターム[2F065FF04]の下位に属するFターム
Fターム[2F065FF04]に分類される特許
121 - 140 / 4,968
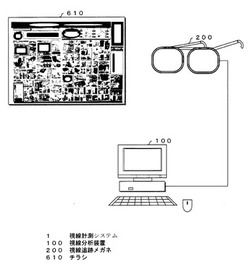
視線分析装置、視線計測システム、方法、プログラム、記録媒体
【課題】本発明の課題は、被験者の視線を推定・追跡することで、評価対象印刷物の掲載情報または陳列棚の商品の注目度を分析評価するシステムを提供することである。
【解決手段】
メガネを通して見るシーン画像とシーン画像上の注視点座標を視線分析装置に送信する視線追跡メガネと、基準画像および基準画像の分割画像の、特徴点の座標と特徴量を記憶する手段と、視線追跡メガネからシーン画像と注視点座標を受信する手段と、シーン画像の特徴点の特徴量と分割画像の特徴点の特徴量とに基づき最も類似度評価の高い特徴点を組み合せる手段と、最も多い組合せ個数を持つ分割画像の特徴点の座標とシーン画像の特徴点の座標に基づいて座標変換行列を算出する手段と、座標変換行列とシーン画像上の注視点座標から算出した分割画像上の注視点座標を、基準画像に変換して注視点マークを合成する手段と、を備える視線分析装置と、特徴とする視線計測システムである。
(もっと読む)
貼り合せ板状体検査装置及び方法

【課題】貼り合せ板状体における板状体の縁端と接着剤の縁端との間の間隔を比較的容易に検査することのできる貼り合せ板状体検査装置を提供する。
【解決手段】ラインセンサカメラ50と、照明手段51と、照明手段51により照明がなされている状態で貼り合せ板状体10を走査するラインセンサカメラ50から出力される映像信号を処理する処理ユニットとを有し、処理ユニットは、映像信号に基づいて画素単位の濃淡値からなる検査画像情報を生成する検査画像情報生成手段と、検査画像情報から得られる第1板状体11の縁端を横切る検査ライン上の濃淡値プロファイルに基づいて、検査ライン上での第1板状体11の縁端と接着剤13の縁端との間隔を表す縁端間距離情報を生成する縁端間距離情報生成手段とを有し、縁端間距離情報に基づいた検査結果を提供する。
(もっと読む)
ガラス基板欠陥検査方法及びその装置並びにガラス基板欠陥検査システム
【課題】
表面の異物や傷欠陥だけでなく基板の局所的な厚さの変化による欠陥まで検出することを可能にする。
【解決手段】
ガラス基板検査装置を、ガラス基板を透過した光を検出する第1の欠陥検出光学系と、ガラス基板を透過した光によりガラス基板の表面又は内部で発生した散乱光を検出する第2の欠陥検出光学系と、第1の検出光学系で検出した信号と第2の検出光学系で検出した信号とを処理する信号処理手段とを備えて構成し、信号処理手段は、第1の検出光学系手段からの検出信号を入力して処理することによりガラス基板の局所的な厚さの変化に起因する欠陥を検出し、第2の検出光学系手段からの検出信号を入力して処理することによりガラス基板の欠陥を検出するように構成した。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】画像から所望の領域を容易に抽出可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】画像データに基づく初期画像IMが表示部260に表示される。使用者が初期画像IMにおいて抽出すべき領域を含む抽出範囲を指定することにより、抽出範囲内で設定された抽出条件に基づいて一または複数の領域が抽出される。抽出された一または複数の領域から、領域に関する特徴情報に基づいて特徴領域が選択される。選択された特徴領域が抽出領域として決定される。使用者が初期画像IMにおいて抽出すべき他の領域を含む抽出範囲を指定することにより、抽出範囲内で設定された抽出条件に基づいて一または複数の領域が抽出される。抽出された一または複数の領域から、領域に関する特徴情報に基づいて特徴領域が選択される。選択された特徴領域は、既に決定された抽出領域に加えられる。
(もっと読む)
監視装置、プログラム
【課題】ベッドを基準にして監視すべき領域を自動的に検出することにより、監視対象の人の動作を正確かつ再現性よく検出することを可能にした監視装置を提供する。
【解決手段】距離画像センサ10は、画素値が物体までの距離値である距離画像を生成する。距離画像センサ10の視野領域には、監視対象であるベッドの全体を含む。ベッド認識部21は、距離画像センサ10が出力した距離画像を用いてベッドの位置を抽出する。人認識部22は、距離画像センサ10が出力した距離画像のうちベッド認識部21により認識したベッドの範囲内と範囲外とにおいて人が占有する領域を検出する。行動判定部23は、ベッド認識部21により検出したベッドと人認識部22により検出した人の領域との組み合わせによりベッドに対する人の動作を判別する。
(もっと読む)
対象物の三次元座標を決定する方法および装置
【課題】対象物の三次元座標決定のための、改善された方法および装置を提供する。
【解決手段】対象物の三次元座標を決めるための方法において、プロジェクタ(3)によりパターン(6)が前記対象物(1)上に投影され、前記対象物(1)により反射された光がカメラ(4)により記録され、前記カメラ(4)によって記録された画像が測定される。前記対象物(1)の上および/または傍側にある基準点マーク(8)が、リファレンスカメラ(5)によって記録される。前記リファレンスカメラ(5)の視野(9)は、カメラ(4)の視野よりも広い。この方法を改善するために、前記リファレンスカメラ(5)は、前記カメラ(4)と、または前記プロジェクタ(3)および前記カメラ(4)を備える三次元センサ(2)と接続されている。
(もっと読む)
フレーム部材用検査治具、フレーム部材用検査装置及びフレーム部材用検査方法
【課題】廉価な測定装置を使用するとともに、測定方向が異なる種々の被検査部位を、同一方向から容易且つ正確に測定することを可能にする。
【解決手段】フレーム部材用検査装置10は、フレーム部材12に設けられる被検査部位の位置を測定し、前記測定された位置の精度を検査する。この検査装置10は、フレーム部材12を所定の姿勢に保持する保持機構50と、前記フレーム部材12の被検査部位に直接装着されるとともに、前記被検査部位に対応し且つ前記フレーム部材12の横方向に向かう計測孔部86が設けられる検査治具52と、前記計測孔部86を測定して算出される該計測孔部86の位置情報に基づいて、前記被検査部位の位置精度を検出する測定機構56L、56Rとを備えている。
(もっと読む)
形状計測装置、形状計測システム、及び形状計測方法
【課題】低いコストで、広い高さ範囲を高精度に計測可能な形状計測装置を提供する。
【解決手段】第1の光を発する第1の発光部11、及び第2の光を発する第2の発光部12と、第1の光及び第2の光を受ける格子3と、測定物4が配置されるステージ14と、格子3を透過した第1の光、及び格子3を透過した第2の光の両方が透過する投影光学系5であって、第1の光を第1の入射角で測定物4表面に入射させ、第2の光を第2の入射角で測定物4表面に入射させる投影光学系5と、第1の光による測定物4表面の格子3の第1の変形像、及び第2の光による測定物4表面の格子3の第2の変形像に基づき、測定物4表面の高さの分布を算出する高さ分布算出部と、を備える、形状計測装置。
(もっと読む)
尖端バンプの高さ測定装置
【課題】 半導体チップの尖端バンプの高さを測定する。
【解決手段】 尖端バンプを含む複数の半導体チップが形成された半導体ウェハ21の上方に面照射装置33が配置されて、面照射装置33が半導体ウェハ21の上面に光を照射する。一対の撮像装置34,35が、半導体ウェハの斜め上方に配置されて、半導体ウェハ21上の尖端バンプを含む半導体チップを斜め上方から撮像する。コンピュータ36は、一対の撮像装置34,35によって撮像された一対の画像に基づいて尖端バンプの底から先端までの長さをそれぞれ検出して、前記検出した一対の長さと、一対の撮像装置34,35の光軸が半導体ウェハ21の上面となす角度を用いて尖端バンプの高さを計算する。
(もっと読む)
路面分析
【課題】車両が走行しようとする路面を分析し、車両の安全性および制御を向上させる。
【解決手段】システム10は、シリコン網膜11のようなAERカメラを用いる。このシリコン網膜11を用いて、走行しようとする路面をモニタリングする。そして、処理ユニット12が、そのシリコン網膜によって提供された信号に基づいて、路面を分析する。路面分析方法は、上記のシステム10によって実行され、従来の分析方法を凌駕するものである。
(もっと読む)
微小角変位測定方法と装置
【課題】簡単な構造で、数十ナノラジアン以下の微小角変位を測定可能な微小角変位測定方法と装置を提供する。
【解決手段】レーザ光源12と、レーザ光源12からのレーザ光Lを収束又は発散させるレンズ18と、レーザ光Lを分岐させる偏光ビームスプリッタ20と1/4波長板22を有する。測定対象面24で反射したレーザ光Lが、臨界角直前の角度で臨界面26aに入射する臨界角プリズム26を備える。臨界角プリズム26の臨界面26aで反射したレーザ光Lが入射する一方の画像センサ30と、臨界角プリズム26の臨界面26aを透過したレーザ光Lが入射する他方の画像センサ32とを備える。各画像センサ30,32の各画素の出力を基に、測定対象面24の微小角変位を演算する微小角変位演算手段であるコンピュータ34を備える。臨界角プリズム26に入射するレーザ光Lを分割するビームスプリッタを設けても良い。
(もっと読む)
熱画像データ保存装置
【課題】監視対象となる高温物が所定の撮像位置に位置したことを検出するための機械的リミットスイッチを用いず、それを設置するためのスペース及び作業コストが不要になる熱画像保存装置の提供。
【解決手段】熱画像2aを生成する熱画像生成手段2には、熱画像2aの処理を行う熱画像処理手段3が接続されている。熱画像処理手段3には、取鍋4が所定の撮像位置に位置した際に熱画像2a内で取鍋4が占める領域内の温度を監視して、領域内の温度が所定の検出用閾値以上である場合に、取鍋4が撮像位置に位置したことを検出する位置検出部30が含まれている。
(もっと読む)
計測装置及び電気的装置
【課題】光学センサを用いて用紙搬送量を正確に特定する。
【解決手段】画像形成装置は、記録ヘッドを搭載するキャリッジを主走査方向に搬送し、用紙を搬送ローラを通じて主走査方向とは垂直な副走査方向に搬送する。この画像形成装置は、キャリッジの静止状態で、用紙搬送方向に平行な第一の検出方向への用紙移動量及びキャリッジ搬送方向に平行な第二の検出方向への用紙移動量を検出可能な光学センサを備える。キャリッジに固定された光学センサは、キャリッジの移動に伴って、キャリッジと共に傾くため、本装置では、リニアエンコーダを用いて検出したキャリッジ位置、ロータリエンコーダを用いて検出した搬送ローラ回転量、及び、光学センサの検出値を用いて、光学センサの傾き(角度θ)を算出する(S270)。そして、用紙搬送中にキャリッジが搬送される際には、光学センサにより検出された第一の検出方向の用紙移動量を上記角度θに基づいて補正する。
(もっと読む)
画像読取システム、原稿サイズ検出装置、及び原稿サイズ検出方法、並びに画像読取方法
【課題】原稿の厚みに影響されず安定して原稿の画像を読み取ることができる画像読取システム、原稿サイズ検出装置、及び原稿サイズ検出方法、並びに画像読取方法を提供する。
【解決手段】原稿の画像を読み取る画像読取装置と、画像読取装置を制御する制御装置とを備えた画像読取システムであって、原稿を搬送路に沿って搬送する搬送手段と、搬送路の途中に設けられ且つ原稿の厚みに応じて搬送路から離れる方向に移動可能に設けられ、搬送路に沿って搬送される原稿の画像を読み取る画像読取手段と、画像読取手段で読み取った原稿の画像データに所定の処理を施す画像処理手段と、原稿の厚みを判別する原稿の厚さ判別手段と、原稿の厚さ判別手段による判別結果に基づいて、画像読取手段による原稿の読取条件、又は画像処理手段による原稿の画像処理条件を変更する変更手段とを備え、原稿の厚みに影響されず安定して原稿の画像を読み取るようにした。
(もっと読む)
キャリブレーション方法および映像表示装置
【課題】テレビジョン装置に固定されたカメラのキャリブレーションを行い易いキャリブレーション方法および映像表示装置を提供することである。
【解決手段】実施形態のキャリブレーション方法は、カメラおよび第1ディスプレイを備える映像表示装置のカメラ映像を補正するキャリブレーション方法であって、設置工程と、第1表示工程と、反射工程と、撮像工程と、算出工程と、補正工程とを含む。設置工程では、前記第1ディスプレイと、第2ディスプレイとを対向させて設置する。第1表示工程では、前記第1ディスプレイに所定の表示画像を表示させる。反射工程では、前記第1ディスプレイ上の表示画像を前記第2ディスプレイの表面で反射させる。撮像工程では、前記第2ディスプレイで反射された前記表示画像を前記カメラによって撮像する。算出工程では、カメラ映像における前記表示画像の位置のずれから、前記カメラと前記第1ディスプレイとの相対的位置関係を算出する。補正工程では、前記相対的位置関係に基づいて前記カメラ映像を補正する。
(もっと読む)
ボトルの液状収容物の入味検査方法及びボトル入味検査システム
【課題】検査精度を上げて入味容量のバラツキを少なくできるようにする。
【解決手段】キャップ天面高さと満注容量との相関関係を予め測定して第1相関関係情報を取得すると共に、最低充填容量を設定し、満注容量よりも所定量減量した液状収容物をボトルに充填した場合の入味線高さとキャップ天面との高低差と、所定量との相関関係を求めて第2相関関係情報を取得しておいて、被検査用ボトルに対するキャップ天面高さを計測して第1相関関係情報から満注容量を決定すると共に、満注容量と最低充填容量との差に対応する差分高さを第2相関関係情報から算出して、被検査用ボトルに対応する許容最低入味線高さを求め、液状収容物の実入味線高さを計測し、許容最低入味線高さと実入味線高さとを比較して、実入味線高さが高ければ良品と判定し、実入味線高さが低ければ不良品と判定する。
(もっと読む)
柄計測装置及び柄計測方法
【課題】ランダム柄を正確に計測しやすい柄計測装置を提供する。
【解決手段】凹凸型を用いてプレス成型された基材30の凹凸柄を計測する柄計測装置に関する。前記凹凸型の三次元の加工データを記憶する加工データ記憶手段11。前記加工データから選択された任意の特徴部sのデータを記憶する特徴部データ記憶手段12。前記基材に形成された前記凹凸柄を全面計測して得られる三次元データを記憶する凹凸柄データ記憶手段13。前記特徴部データと前記凹凸柄データとを比較することによって、前記特徴部により前記基材に形成される特徴柄が基材30の一端からどの位置に現れるかを検出すると共に、検出された前記特徴柄の位置を基準にして前記加工データと前記凹凸柄データとを比較することによって、前記加工データと前記凹凸柄データとのズレを算出する算出手段14とを備える。
(もっと読む)
段差部認識装置
【課題】ステレオカメラにより取得されるステレオ画像を利用して、階段等の段差部の踏面の先端側エッジの空間的な位置及び方向を含む該段差部を配置位置を精度良く認識することができる装置を提供する。
【解決手段】カメラ3R,3Lのうちの基準画像に、複数条の演算処理領域R3min(k2)を設定すると共に、複数条の演算処理領域R3min(k2)のそれぞれにおける実エッジ投影線L52rの複数の候補位置v(k1)を設定し、各演算処理領域毎に、各候補位置の実エッジ投影線(段差部の先端側エッジの投影線)の位置に対する適合度を表す評価関数の値を射影変換を利用して算出する。実エッジ投影線を推定してなる推定エッジ投影線を、複数条の演算処理領域R3min(k2)のそれぞれにおける推定エッジ投影線の位置の適合度を合成してなる合成適合度が最も高くなるように決定する。推定エッジ投影線と段差部の踏面の平面パラメータとに基づいて段差部の空間的な配置を認識する。
(もっと読む)
部品実装装置、および、三次元形状測定装置
【課題】影の影響を除去し正確に位相シフト法による三次元データを高速に取得する。
【解決手段】直交する第一方向と第二方向とに撮像画素が行列状に並ぶエリアイメージセンサ111を有するカメラ101と、カメラ101と測定対象物200とを第一方向に相対的かつ連続的に移動させる移動手段102と、第一アングルで第一周期光を照射する第一照射手段131と、第二アングルで第二周期光を照射する第二照射手段132と、第一照射時間と第二照射時間とが重ならないように制御する照射制御手段104と、エリアイメージセンサ111の複数の第一ライン171を用い、第一照射手段131が照射する際の対象部分の像を取得し、複数の第二ライン172を用い、第二照射手段132が照射する際の像を取得する像取得手段105とを備える。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
121 - 140 / 4,968
[ Back to top ]