
Fターム[2F065FF09]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 3角法 (1,730)
Fターム[2F065FF09]に分類される特許
121 - 140 / 1,730
形状測定装置およびこれに用いる光学フィルタ
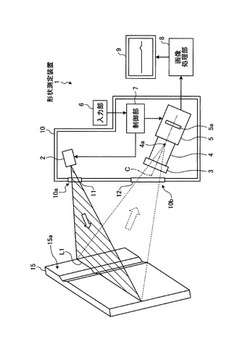
【課題】装置構造を大型化することなく、光切断法によって至近距離から大型な被測定物の形状を精度よく測定できること。
【解決手段】本発明の一態様にかかる形状測定装置1は、被測定物15にスリット光L1を照射し、被測定物15から反射したスリット光L1をフィルタ3を介して撮像するとともにスリット光L1以外を遮光して、被測定物15の形状を測定する。フィルタ3の中心透過波長は、レンズ4の光軸C近傍においてスリット光L1の主ピーク波長と同等であり、スリット光L1の入射面に沿って光軸Cからフィルタ3の縁側に向けて大きくなる。
(もっと読む)
投影装置およびその方法、並びに投影装置を用いた形状認識装置およびその方法

【課題】配置の制約が少なく、かつ照度不足および照度ムラが生じにくい投影装置を提供する。
【解決手段】撮像部の撮像対象物に対して光を投影する投影装置200であって、放射する光の波長帯が互いに異なる赤色LED240R、緑色LED240Gおよび青色LED240Bと、撮像対象物の特性に基づき、各LEDが放射する光の光量を制御する投影制御部230と、複数のLEDから放射される光を、同一の光軸上に導くことにより、撮像対象物に対して光を投影するリレー部250とを備える。
(もっと読む)
内視鏡装置および計測方法
【課題】計測に適した条件であるかを短時間で判定できる内視鏡装置および計測方法を提供する。
【解決手段】本発明の内視鏡装置1は、第一光源41からの照明光の出射状態を所定の周期で変化させ、第一光源41から照明光が出射されている状態では第二光源51からの投影光の出射を停止させ、第一光源41からの照明光の出射が停止されている状態では第二光源51から投影光を出射させ、照明光により被検物が照明された明視野画像を第一光源41から照明光が出射されている状態で撮像部30に取得させ、被検物に縞パターンが投影されたパターン投影画像を投影光が出射されている状態で撮像部30に取得させ、撮像部30が取得したパターン投影画像を用いて被検物の三次元形状を計測し、パターン画像を用いた計測によって得られた情報を明視野画像とともにモニター28に表示させるメイン制御部22を備える。
(もっと読む)
検出対象物の中心位置を算出する方法、装置およびプログラム
【課題】複数の検出対象物が任意の方向を向いて配置されている場合であっても、それぞれの検出対象物の中心位置を算出することができる方法、装置およびプログラムを提供する。
【解決手段】既知の半径を有する円筒または球を少なくとも一部に含む検出対象物の中心位置を算出する方法を提供する。当該方法は、少なくとも1つの検出対象物を撮像した入力画像を取得するステップと、検出対象物の形状に相当する領域を入力画像から抽出するステップと、抽出された領域についての高さ情報を取得するステップと、抽出された領域内において明るさが極大となる部分を特定し、当該部分の法線方向を決定するステップと、決定した法線方向と、既知の半径と、明るさが極大となる部分の位置と、対応する高さ情報とから、検出対象物の中心位置を決定するステップとを含む。
(もっと読む)
溶削済み鋼材の表面検査方法および表面検査装置
【課題】表面を溶削された鋼材の表面に残留する湯だれや未溶削部などの欠陥を精度良く確実に検出できる溶削済み鋼材の表面検査方法、およびこれに用いる検査装置を提供する。
【解決手段】1200℃以上に加熱され且つ表面f1〜f4,c1〜c4を溶削された鋼材Mの該表面を撮像する第1カメラ10、および、該カメラ10により得られた画像の輝度信号bsを温度に換算し、健常部位との温度差により湯だれ部mdや未溶削部umの疑似欠陥部分の有無を判別する信号処理部11を含む疑似欠陥検出部12と、上記撮像がされた同じ鋼材Mの表面f1〜f4,c1〜c4にレーザL1を照射するレーザ照射装置2、照射された該レーザL1が拡散反射された鋼材Mの表面f1〜f4,c1〜c4を撮像する第2カメラ7、および、該カメラ7により得られた画像を基に、鋼材Mの表面を連続した断面形状により3次元的に示す画像処理部8を含む3次元計測部9と、を備えている、溶削済み鋼材の表面検査装置1。
(もっと読む)
情報取得装置、投射装置および物体検出装置
【課題】検出対象物が近距離にある場合においても、大きな目標物の距離情報を取得できる情報取得装置、投射装置および物体検出装置を提供する。
【解決手段】投射光学系11は、レーザ光源111と、コリメータレンズ112と、レーザ光を分離させるハーフミラー113と、分離されたレーザ光をドットパターン光Dp1に変換して目標領域に投射するDOE114と、分離されたレーザ光をドットパターン光Dp2に変換して目標領域に投射するDOE115と、を備える。複数のDOE114、115を用いることにより、広い角度範囲で、目標領域にドットパターンを照射できる。これにより、情報取得装置は、検出対象物が近距離にあるような場合においても、検出対象物の距離情報を適正に取得することができる。
(もっと読む)
奥行計測装置
【課題】複数の奥行計測装置が近傍で動作している場合、近傍の奥行計測装置が発光する平面パターンが妨害して平面パターンの認識ができず奥行計算ができない場合があった。
【解決手段】平面パターンの発光を間欠的にして、ほぼ発光期間のみを露光期間とすることにより、近傍の奥行計測装置が発光する期間に露光する確率を減らす。
これにより平面パターンが認識できなくなる確率が減じる。また、平面パターンが認識できないことを検出して発光のタイミングを変える。
(もっと読む)
基板検査装置、基板検査方法及び該基板検査装置の調整方法
【課題】貼り合わせた2つの基板層のいずれかに検査光の透過しない部分があっても、貼り合わせ界面に発生し得る微小空洞を検査することのできる基板検査装置を提供することである。
【解決手段】基板100の表面に対して斜めに入射するように検査光を帯状に照射する光源ユニット30と、前記検査光により前記基板の表面に形成される帯状照明領域を挟んで光源ユニット30と逆側の所定位置に配置されるラインセンサカメラ20とを有し、照明ユニット30及びラインセンサカメラ20と基板100とが相対移動している際にラインセンサカメラ20から出力される映像信号に基づいて基板画像情報を生成し、基板画像情報に基づいて基板100の第1基板層101と第2基板層102との界面に生じ得る微小空洞についての検査結果情報を生成する構成となる。
(もっと読む)
曲面印刷装置及び曲面印刷装置の印刷制御方法
【課題】簡易な手法により、人の爪部のような湾曲形状の印刷対象面に対しても高精細な印刷を行うことのできる曲面印刷装置及び印刷制御方法を提供する。
【解決手段】インク噴射方向における印刷部40との距離が幅方向の中央部では小さな距離L1で、幅方向の端部に行くほど大きな距離L2となる湾曲形状をなす爪領域Taを有する爪部Tに対して印刷を行うネイルプリント装置1であって、爪領域Taの幅方向の中央部の印刷ピッチP1よりも幅方向の両端部の方の印刷ピッチP2が印刷部40による印刷の際の印刷ピッチが細かくなるように対応付けられたピッチ調整基本テーブルに応じて、爪領域Taに印刷すべき画像の元画像データから爪領域画像の幅寸法に対応した印刷用データを生成し、この印刷用データにしたがって爪領域Taに印刷を施す。
(もっと読む)
計測面傾き計測装置、プロジェクタ及び計測面傾き計測方法
【課題】投影面傾き計測装置、プロジェクタを小型化する。
【解決手段】投影面傾き計測装置11は、投光ユニットと、入射角センサと、を備える。入射角センサは、水平方向、垂直方向にそれぞれ、2つずつ配置される。投光ユニットは、スクリーンS上の水平方向、垂直方向に、それぞれ、設定された2つの測距点に光を投光して投光スポットを形成する。入射角センサは、投光スポットからの反射光を受光して、その入射角を検出する。この入射角センサは、2分割受光素子からなり、2つの受光素子に入射した光の受光割合に基づいて、反射光の入射角を検出する。このような構成により、位相センサで必須のレンズが不要となり、レンズの焦点距離を確保する必要もないので、小型化も可能となる。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】計測対象面への入射方向を挟んで対称に配置され受光面の計測対象面に対する傾斜角度が各対毎に相異なる2対の位置検出素子群25A,25Bを有し、走査光の計測対象面からの反射光の受光位置を検出する位置検出部25と、各位置検出素子が受光する光量が所定の範囲内にあるか否かを判定する受光量判定部34と、同一の位置検出素子群に属する位置検出素子による反射光の受光位置検出結果の差異の大きさが所定の基準値以下であるか否かを判定する受光位置検出結果判定部35とを備え、位置検出部25の受光位置検出結果に基づき受光量判定部34および受光位置検出結果判定部35の判定結果を加味して計測対象面の3次元認識画像を形成する構成とする。
(もっと読む)
光学式プローブ
【課題】光学系に可動機構を備えることなく、測定対象物の形状を逐次測定することが可能な光学式プローブを提供する。
【解決手段】レーザ光を出射するレーザ光源と、レーザ光源により出射されたレーザ光を平行光とするコリメータレンズと、コリメータレンズにより平行光とされたレーザ光をライン形状の光に変形する光形状変形手段と、光形状変形手段により変形されたライン形状の光を測定対象物に対して選択的に照射させる光照射手段と、光照射手段により選択的に照射されて測定対象物の表面にて反射されたレーザ光に基づいて測定対象物の画像を撮像する撮像手段と、光照射手段によるライン形状の光の照射を制御する制御手段と、を備え、制御手段は、光照射手段において、ライン形状の光の一端部から他端部まで所定の範囲ずつ順次光を照射させる。
(もっと読む)
封止容器の検査方法及び検査装置
【課題】目視に頼っていた封止容器のリッドの位置ずれ検査を光切断方式を用いて自動化する方式と検査装置を提供する。
【解決手段】パッケージ36にリッド37を接合した封止容器の上面へスリット光を照射し、スリット光に対し封止容器を相対的に移動させて封止容器の複数箇所にスリット光を照射し、パッケージ36の厚みにより分離したスリット光の端点の位置情報を光切断方式を用いて測定し、測定した平面方向の位置情報と予め定めた基準値とを比較する事によりパッケージ36に対するリッド37の位置ずれと傾きを判断する。
(もっと読む)
ビードスティフナーの検査方法及び検査装置
【課題】ビードスティフナーの接合部分の検査において、基準形状と比較することなくビードスティフナーの形状を正確に測定して良否判定の精度を向上させるビードスティフナーの検査方法及び検査装置を提供する。
【解決手段】環状のビードコアと、帯状に成形され、延長方向の端部と端部とを互いに接合させてビードコアの外周に巻きつけられたスティフナーとを有するビードスティフナーの良否を判定する検査方法であって、ビードスティフナーの断面形状の形状データを取得する工程と、形状データからビードコアの頂点を検出する工程と、頂点から指定された領域内にスティフナーの端部の有無を検出する工程とを含み、スティフナーの端部の有無に基づいてビードコアとスティフナーとの接合の良否を判定する。
(もっと読む)
3次元計測装置
【課題】被計測物を搬送するとともに、被計測物の3次元形状の全周を搬送の途中で停止させることなく非接触で計測することのできる3次元計測装置を提供する。
【解決手段】搬送経路の途中に被計測物Wの搬送方向Aに対して直交する左右方向に沿って計測隙間13が設けられた搬送装置3と、計測隙間13を通過する被計測物Wのステレオ画像を少なくとも計測隙間13の上方および下方のそれぞれで予め設定された計測周期毎に光学的に読み取ってステレオ画像を撮像し、そのステレオ画像の画像データを撮像し、それぞれのステレオ画像を画像データに変換してデータ処理装置5に出力するステレオカメラ21を有する撮像装置4と、ステレオカメラ21により計測周期の1周期毎に撮像されたそれぞれの画像データを合成する処理を連続して行うデータ処理装置5とを設ける。
(もっと読む)
3次元形状測定方法および基板検査方法
【課題】3次元形状測定装置および測定方法を提供すること。
【解決手段】3次元形状測定方法は、測定対象物の第1測定領域で第1画像を撮影する段階と、第1中央処理ユニットを通じて前記第1画像を演算処理し、前記第1測定領域での3次元形状を算出する段階と、前記第1中央処理ユニットが前記第1画像を演算処理する間に、前記測定対象物の第2測定領域で第2画像を撮影する段階と、第2中央処理ユニットを通じて前記第2画像を演算処理し、前記第2測定領域での3次元形状を算出する段階と、を含む。これにより、3次元形状の測定時間を短縮させることができる。
(もっと読む)
道路勾配推定装置及びプログラム
【課題】先行車や車線境界線等の特定物体が存在しない場合でも、前方道路の勾配を精度良く推定する。
【解決手段】路面反射点抽出部22で、レーザレーダ12の観測データから路面反射点を抽出し、第1の立体物候補抽出部24で、残りの点群から第1の立体物候補を抽出する。また、第2の立体物候補抽出部26で、撮像画像から垂直エッジの検出またはパターン認識により第2の立体物候補を抽出し、路面接地点算出部28で、撮像画像上の第2の立体物候補から路面接地点を検出し、その第2の立体物候補に対応する第1の立体物候補の距離情報を用いて、路面接地点の3次元位置を算出する。道路勾配推定部30で、路面接地点算出部28で算出された路面接地点の3次元位置、及び路面反射点抽出部22で抽出された路面反射点の3次元位置を、自車両を中心とする3次元座標空間にプロットして、路面モデルをフィッティングして道路形状を推定する。
(もっと読む)
形状測定装置
【課題】測定範囲および測定精度を調整・変更可能なプローブを備えた形状測定装置を提供する。
【解決手段】ワークに直線状の光を照射する光照射部と、光照射部から照射された光のワークからの反射光を撮像する撮像素子32と、ワークからの反射光を撮像素子32の撮像面に結像させる結像レンズ31と、を備え、光照射部の光照射面と、結像レンズ31の主点を含む主平面と、撮像素子32の撮像面とが、シャインプルーフの条件を満たした形状測定装置であって、撮像素子32の撮像面を複数の領域(S1〜S3)に分割し、測定精度及び/又は測定範囲の大きさに応じて、複数の領域から測定に利用する領域を画像取得領域として選択する制御部10を備える。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】受光素子が指向性を有している場合でも、検出範囲を広く設定することのできる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置において、受光部13は、受光素子130と、受光素子130に対する反射光L3の入射角度範囲を狭める入射角変換部14とを備え、入射角変換部14は、入射部148、第1反射面141、第2反射面142、および第3反射面143を備えた入射角変換用導光路140を有している。このため、対象物体Obで反射した検出光L2(反射光L3)は、入射部148から入射した後、第1反射面141と第2反射面142との間で反射を繰り返しながらXY平面に沿って第1反射面141と第2反射面142との間で進行し、その後、第3反射面143でZ軸方向に反射して、受光素子130の受光面131に入射する。このため、受光面131に対する入射角度が狭い。
(もっと読む)
形状測定装置、形状測定方法、及びそのプログラム
【課題】検出部を被検物に対して移動させて測定位置毎に停止させて測定する場合の測定速度を向上させることができる形状測定装置を提供する。
【解決手段】形状測定装置は、被検物に対しての相対位置が変更されて被検物の表面の形状を検出する検出部(20)と、検出部により検出された被検物の表面の形状の変位を示す情報に基づいて、被検物に対して検出部が相対的に静止しているか否かを判定する判定部(静止判定部58)と、判定部により検出部が相対的に静止していると判定された場合の形状に基づいて、被検物の表面の形状データを算出する算出部(座標算出部53)と、を備える。
(もっと読む)
121 - 140 / 1,730
[ Back to top ]