
Fターム[2F065FF09]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 3角法 (1,730)
Fターム[2F065FF09]に分類される特許
141 - 160 / 1,730
形状測定装置
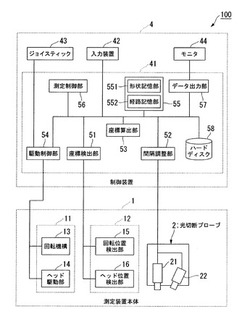
【課題】複雑な形状の被測定物に対して精度を高めて測定する。
【解決手段】形状測定装置(100)は、被測定物にライン光を照射する光照射部(21)及びライン光の照射方向とは異なる方向から被測定物に照射されたライン光を検出する光検出部(22)を有するセンサー部(2)と、光検出部(22)からの検出結果に基づいて被測定物の形状を測定する形状測定部(53)と、センサー部(2)と被測定物とを相対移動させる駆動部(11)と、測定方向に相対移動する間に形状測定部(53)によって得られた複数回の測定の結果に基づいて、測定時のセンサー部(2)と被測定物との少なくとも一方の姿勢を制御する測定制御部(56)とを備える。
(もっと読む)
帯状部材の継ぎ目形状測定方法とその装置及び変位量計測装置

【課題】測定装置もしくは帯状部材を移動させることなく、帯状部材の継ぎ目形状を精度よく測定する。
【解決手段】レーザー照射手段12によりカーカスプライ20の表面にコードの延長方向に直交する方向に延長するライン光を入射角45°で照射し、その反射光のうちの前面散乱光R1を撮影手段13で直接受光し、正反射光R2を第1の光学素子14で反射させ側面散乱光R3を第3の光学素子15で反射させてそれぞれ撮影手段13に受光させる構成とすることで、前面散乱光R1による画像である上面像G1と、正反射光R2による画像である正面像G2と側面散乱光R3による画像である側面像G3とを撮影し、撮影された上面像G1と正面像G2と側面像G3とを用いてカーカスプライ20の継ぎ目部分を含む照射部を3方位から見たときの変位量h1,h2及びh3を求め、変位量h1,h2及びh3を用いてカーカスプライ20の照射部の厚さを求める。
(もっと読む)
CCDカメラを使用した測定装置、及びその応答時間の短縮方法
【課題】CCDカメラの飽和露光量を超える過大な入力光量に対して、最短時間で測定可能なCCDカメラ信号を得ることが可能な測定装置、及びその応答時間の短縮方法を提供することを目的とする。
【解決手段】CCDカメラ1aの露光時間を制御する測定装置100の応答時間の短縮方法であって、CCDカメラは、異なる透過率の2つ以上のフィルタ出力を同時に使用し、入力光量の最小値を検出する第1の透過率の大きいフィルタ出力の測定範囲の最大値(飽和値)と、第2の透過率の低い第2のフィルタ出力の測定範囲の(最小値)とがラップするような透過率とし、第1のフィルタ出力が飽和している場合には、前記第2のフィルタ出力から、前記第1の透過率と前記第2の透過率との比率から、前記第1のフィルタ出力に換算した露光時間の補正ゲインを求め、一回の制御周期(測定周期)で入力光量を検知し、次の制御周期で第1のフィルタの露光時間を更新する。
(もっと読む)
3次元形状計測装置およびロボットシステム
【課題】3次元形状の計測処理を高速化すること。
【解決手段】スリット状の光線を計測対象物に対する照射位置を変更させながら照射する照射部と、前記光線が照射された前記計測対象物を順次撮像する撮像部と、前記撮像部によって撮像された画像を走査することによって前記画像における前記光線の位置を検出する位置検出部と、前記位置検出部による走査対象の画像よりも以前に前記撮像部によって撮像された画像における前記光線の位置に基づいて前記走査対象の画像における走査領域を決定する走査領域決定部とを3次元形状計測装置へ設ける。
(もっと読む)
形状測定装置、形状測定方法、及びそのプログラム
【課題】検出部を被検物に対して移動させて測定位置毎に停止させて測定する場合の測定速度を向上させることができる形状測定装置を提供する。
【解決手段】形状測定装置は、被検物に対しての相対位置が変更されて被検物の表面の形状を検出する検出部(20)と、検出部により検出された被検物の表面の形状の変位を示す情報に基づいて、被検物に対して検出部が相対的に静止しているか否かを判定する判定部(静止判定部58)と、判定部により検出部が相対的に静止していると判定された場合の形状に基づいて、被検物の表面の形状データを算出する算出部(座標算出部53)と、を備える。
(もっと読む)
光学式位置検出装置
【課題】対象物体が検出用光源を配置した領域の外側に位置しても内側に位置しても対象物体の位置を検出できる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、検出用光源部12が検出光L2を射出した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに、光検出部30は、複数の検出用光源部12より内側に位置するとともに、複数の検出用光源部12は各々、第1の発光素子12A1〜12D1と第2の発光素子12A2〜12D2とを備えている。従って、第1の発光素子12A1〜12D1が点灯した際の光検出部30での受光強度と第2の発光素子12A2〜12D2が点灯した際の光検出部30での受光強度との比較結果に基づいて対象物体Obが検出用光源部12より外側に位置しても内側に位置しても対象物体Obの位置を検出することができる。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
形状測定装置
【課題】プローブを交換する事無く種々の測定精度を得ることができる形状測定装置を提供すること。
【解決手段】第1のライン光を測定物に照射する第1光学系と、第1光学系の少なくとも一部の光学素子を有し、第1のライン光よりも長い第2のライン光を測定物に照射する第2光学系とを有する光照射部と、前記測定物による前記第1のライン光の散乱光を検出する第1の検出部と、前記測定物による前記第2のライン光の散乱光を検出する第2の検出部と、を備える形状測定装置である。
(もっと読む)
三次元計測装置および三次元計測方法
【課題】 最適パターン光投影のような強度変調パターン光投影手法による静止物体の三次元画像計測を行う。
【解決手段】 ワークWにパターン光を投影するパターン投影機21と全面照明機22と、パターン光が投影されたワークWを撮像して画像を撮像するカメラ23、24により撮像した画像のデータを処理するデータ処理装置42とから構成され、パターン投影機21によりパターン光を投影して画像を撮影する第1撮像モードと、全面照明機22による全照明反射画像を撮像する第2撮像モードがワークWの種類の特定によって判定される。その撮像結果によって三次元情報が算出されるので、精度の高い三次元情報を得ることができる。
(もっと読む)
変位センサシステム及び変位センサ
【課題】常に、受光量が最大値を示すピーク画素からの受光信号を利用する構成に比べて、検出可能な対象物の制約を抑制することが可能な技術を提供する。
【解決手段】変位センサシステムは、受光信号に基づき指定された少なくとも1つの領域について、当該領域内において受光量がピークを示す画素であるピーク画素が複数存在する場合、当該複数のピーク画素の中からいずれかを、選択画素として選択するピーク選択部と、上記少なくとも1つの領域について、ピーク選択部で選択された選択画素からの受光信号に基づき投受光感度を設定する感度設定部と、各領域内の走査線の受光信号を、当該領域に対応する投受光感度下で前記受光処理部に取り出させ、その取り出された受光信号に応じた検出処理を実行する受光制御部と、を備える。
(もっと読む)
3次元計測装置
【課題】位相シフト法による3次元計測を可能にしながらも、液晶シャッタにおける隣接する画素の透過率を連続的に変化させる場合に比べて応答時間を短縮する。
【解決手段】投影装置1は、光源11と、処理装置3からの制御信号により透過率が個別に制御される画素が2次元格子上に配列された液晶シャッタ12と、光源11から出力され液晶シャッタ12を透過した光束の少なくとも一部を混合して計測対象4の表面に照射させるレンズ13とを備える。処理装置3は、液晶シャッタ12にそれぞれ複数列の画素からなり平均透過率が周期的に変化する複数の帯領域を形成させるように制御信号を出力し、レンズ13は、帯領域を透過した光束を混合して計測対象4の表面に縞状の光パターンを形成させる。
(もっと読む)
三次元形状計測装置、プログラム、コンピュータ読み取り可能な記録媒体、及び三次元形状計測方法
【課題】広い視野に渡る計測対象の三次元形状情報を迅速かつ容易に計測する。
【解決手段】三次元形状測定装置10は、計測対象に投影された光パタンを解析することによって、計測対象の三次元形状を計測する装置である。ここで、三次元形状測定装置10は、光パタンが投影された計測対象を画像として読み取るためのラインセンサ16と、ラインセンサ16により読み取られた画像における光パタンを空間縞解析法に基づいて解析して、計測対象の三次元形状の情報を算出する画像解析部とを備えている。
(もっと読む)
視差算出装置、距離算出装置及び視差算出方法
【課題】二つの視点それぞれから得られた画像間の視差を算出する際、画像間の歪み又はずれの影響を抑え、精度の高い視差を簡易に算出する視差算出装置、距離算出装置及び視差算出方法を提供する。
【解決手段】視差算出装置100は、第一カメラ1から得られた基準画像及び第二カメラ2から参照画像を取得する。画像分割部101は、条件設定部102によって設定される分割条件に従い、基準画像及び参照画像それぞれを複数の領域に分割する。補正量決定部103は、分割された領域毎に画像ずれ量を算出し、その画像ずれ量に基づき補正量を決定する。視差算出部104は、補正量決定部103によって決定された補正量に基づいて画像分割部101から得られる分割基準画像及び分割参照画像の各領域に対して画像の補正を行い、補正後の画像に基づいて視差を求める。
(もっと読む)
計測装置、欠陥検査装置及び計測方法
【課題】全体形状と局所的形状とを両方とも精度良く計測する。
【解決手段】プロジェクタ1は物体M上に映像を投影する。撮像装置2はプロジェクタ1によって物体M上に投影された映像を、プロジェクタ1とは異なる角度から撮像する。ステージ3及びステージ駆動装置4は、物体Mとプロジェクタ1及び撮像装置2との間の所定方向の相対走査を実行する。記憶部6には、ステージ3及びステージ駆動装置4による相対走査を実行しつつ、プロジェクタ1によりY軸方向に延びるスリット像を基準となる物体M上に投影させたときに撮像装置2によって撮像される動画像も記憶されている。制御部9は、ステージ3及びステージ駆動装置4による相対走査を実行しつつプロジェクタ1により記憶部6に記憶された動画像を計測対象の物体M上に投影させるとともに、撮像装置2により物体M上に投影された動画像を撮像させる。
(もっと読む)
計測装置、検査装置及び計測方法
【課題】高速に搬送される計測対象の物体の3次元形状計測を高精度に行う。
【解決手段】プロジェクタ2は、Y軸方向に並ぶ明暗ピッチによりコード化されたスリットパターンがX軸方向に複数配列され、Y位置が同じビットデータを各スリットパターンから抽出してX軸方向に沿って並べたときのビット列の値がY軸方向に沿って線形に変化するように各スリットパターンがコード化されたスリットパターン像を、物体Mの搬送経路上に投影する。撮像装置3は、物体MがX軸方向に搬送されスリットパターン像を通過する様子を、プロジェクタ2とは異なる角度から撮像する。コード生成部6は、撮像された動画像に基づいて、物体M上における計測対象の位置が、各スリットパターンにそれぞれ到達したときの明暗をコード化する。高さ算出部7は、コード化されたコードに基づいて、計測対象の位置の高さを算出する。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】ズーム機能を用いた場合であっても、精度よく三次元モデルを作成する。
【解決手段】画像取得部11は、ペア画像を取得する。特徴点対応抽出部12Bは、画像取得部11が取得したペア画像のそれぞれの画像から、特徴点対応の組を抽出する。誤対応除去部12Cは、特徴点対応抽出部12Bによって抽出された特徴点対応の組において、垂直座標の差が所定値以上ある組を誤対応として除去する。第1補正部12Dは、誤対応が除去された後の特徴点対応の組の垂直座標に基づいて、画像取得部11が取得したペア画像を、三次元モデル作成に適した画像に補正する。三次元モデル生成部13は、画像取得部11が取得し、画像補正部12が補正したペア画像から、被写体の三次元モデルを生成する。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
対象物の認識システム、見守りシステム、監視システム
【課題】エネルギ照射装置と2次元撮像装置を用いることで、種々の条件下で頑健に動作する対象物認識システムおよび見守りシステム、監視システムを提供する。
【解決手段】観測対象となる空間に向けて、所定の位置から照射方向を変えながら、エネルギを照射する照射手段と、照射手段で照射されたエネルギの反射エネルギを2次元的に感知し、対象となる空間を2次元的に撮像する撮像手段と、撮像手段で撮像した撮像画像上の切断曲線の特徴を用いて対象物の認識を行う認識手段とを備える対象物認識システムおよび該システムを備える見守りシステム、監視システム。
(もっと読む)
平坦度検出装置、および平坦度検出方法
【課題】簡単な構成で容易に平坦度を検出可能な平坦度検出装置、および平坦度検出方法を提供する。
【解決手段】平坦度検出装置1は、三次元測定装置2から計測データを取得する計測データ取得手段141と、検査対象計測面上の第一計測点を取得する第一計測点取得手段143と、第一計測点から検査対象計測面の幾何形状式を算出する第一形状算出手段144と、計測データから隣接計測面に属する第二計測点を取得する第二計測点取得手段145と、第二計測点から隣接計測面の幾何形状式を算出する第二形状算出手段146と、検査対象計測面および隣接計測面の交線または交点を算出する外周縁算出手段147と、交線または交点に基づいて補正検査対象計測面の幾何形状式を算出する補正計測面算出手段148と、補正検査対象計測面の幾何形状式に基づいて検査対象面の平坦度を検出する平坦度検出手段149と、を具備した。
(もっと読む)
リソグラフィ装置のためのレベルセンサの構成及びデバイス製造方法
【課題】改良されたレベルセンサを提供する。
【解決手段】レベルセンサはリソグラフィ装置において基板表面高さを測定する。レベルセンサには、検出用の放射を基板に発する光源と、基板から反射された放射を測定するための検出器ユニットと、が設けられている。光源は、リソグラフィ装置において基板を処理するために使用されるレジストが反応する波長域の検出用放射を発する。
(もっと読む)
141 - 160 / 1,730
[ Back to top ]