
Fターム[2F065FF09]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 3角法 (1,730)
Fターム[2F065FF09]に分類される特許
81 - 100 / 1,730
画像処理方法および装置
【課題】高密度かつ高速に運動する物体の形状計測を可能にするための画像処理方法および装置を提供する。
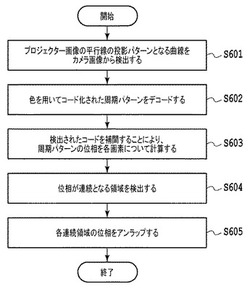
【解決手段】投影装置により観測対象上に投影される、周期パターンからなる投影パターンを撮影装置により撮影し、投影パターンを含む入力画像から形状復元を行う画像処理方法において、投影装置より投影された投影パターンを撮影装置により撮影された入力画像から検出するステップと、検出された投影パターンの相対位相を検出するステップと、検出された投影パターンの絶対位相を、基準位置からの相対的な位相と、基準位置の絶対的な位相との和により表すと、複数の投影パターンの絶対位相により計算した奥行きが一致するという第1条件が検出された投影パターンの各画素について成立することに基づき基準位置の絶対的な位相を計算するステップとを備える。
(もっと読む)
3次元計測方法

【課題】ワークの3次元計測を行うために、3次元上の直線の式を算出する直線部を選択する場合に、多くの直線部を選択可能にする3次元計測方法を提供する。
【解決手段】ワークの3次元計測を行うにあたり、まず、ワークの設計データを取得する(S1)。次に、第1カメラ及び第2カメラよって、ワークを撮像し、第1画像及び第2画像を取得する(S2)。そして、取得した画像データから第1及び第2直線部を選択する(S4)。これら第1及び第2直線部を選択すると、ステレオ法を用いて第1直線部の3次元上の直線の式を算出する。次に、第1直線部の3次元上の直線の式と、ワークの設計データから求められる第1直線部に対する幾何学的な拘束条件とを用いて第2直線部の3次元上の直線の式を算出する。そして、これら第1及び第2直線部の3次元上の直線の式を用いてワークの3次元位置又は姿勢を計測する。
(もっと読む)
3次元形状測定方法及び装置並びに3次元形状測定用顕微鏡装置
【課題】段差部を有する鏡面反射性物体の形状を高精度に測定することが可能な3次元形
状測定方法及び装置並びに3次元形状測定用顕微鏡装置を提供する。
【解決手段】デフレクトメトリの手法を用いて被検面4の局所スロープ情報及び形状情報
を求めた後、投影光学系2による面光源1の共役位置3が記被検面4上に位置するように
設定するとともに、開口絞り22の絞り半径を小さくして、面光源像を被検面4に投影す
る。観察光学系5により観察される面光源画像における歪情報と、先に求めた局所スロー
プ情報及び形状情報に基づき、被検面が有する段差部の段差量情報を求め、その段差量情
報に基づき形状情報を補正する。
(もっと読む)
情報処理装置及び情報処理方法
【課題】 計測対象物体からの反射光を用いて3次元計測を行う手法において、計測の誤差に起因する、計測対象物体の3次元位置の取得精度の低下を防止することを目的とする。
【解決手段】 構造化光が投影された計測対象物体からの反射光の情報と、前記構造化光の光源の位置と、前記反射光を受光して前記反射光の情報を取得する受光部の位置とを用いた三角法により、前記計測対象物体の表面の複数の位置を取得する第一の取得手段と、前記複数の位置に基づき、前記計測対象物体の表面の位置および向きを取得する第二の取得手段と、前記複数の位置を取得する際の計測の誤差に関する情報と、前記計測対象物体の表面の位置および向きとに基づき、前記複数の位置の少なくとも一つを補正する補正手段と、を有することを特徴とする。
(もっと読む)
撮像装置、撮像装置の制御方法、三次元計測装置、およびプログラム
【課題】サンプリングピッチを細かくすることなく、少ないサンプリング数でより高精度に交点を算出する。
【解決手段】明部および暗部を有する第1のパターンまたは第2のパターンを投影パターンとして対象物へ投影する投影部と、投影パターンが投影された対象物を撮像素子に輝度分布として結像させる撮像部と、を備え、輝度分布は明部に対応する第1の輝度値と暗部に対応する第2の輝度値とを有し、第1のパターンおよび第2のパターンは明部の位置または暗部の位置が重複する重複部を有し、第1のパターンに対応する第1の輝度分布および第2のパターンに対応する第2の輝度分布は重複部で同輝度値となる交点を有し、交点の輝度値は第1の輝度値および第2の輝度値の平均値と所定値だけ異なる。
(もっと読む)
3次元相対座標計測装置およびその方法
【課題】撮影点におけるカメラの位置および姿勢を事前に把握することなく相対座標を計測することができる3次元相対座標計測装置を提供する。
【解決手段】3次元相対座標計測装置90は、第1の視点より3点の基準点が撮像装置で撮像された第1の取得画像を取得する画像取得部100と、各画素に対する画素視点投影角の情報を保持し、情報を用いて、第1の取得画像に投影される3点の基準点に対応する画素視点投影角である3つの第1の基準視点投影角を取得する視点投影角抽出部120と、3つの第1の基準視点投影角と3点の基準点の相対座標とを用いて、第1の取得画像の撮像面である第1の撮像面と3点の基準点を含む基準平面とのなす第1の傾斜角を算出する傾斜角算出部130aと、第1の傾斜角を用いて、3点の基準点のいずれかと対象点との相対座標を計測する相対座標計測部130dとを備える。
(もっと読む)
シート状部材の巻き付け状態の検査方法及び検査装置
【課題】成形ドラムに巻き付けられたシート状部材の巻き付け状態を精度良く測定する。
【解決手段】ドラム周方向Cに沿った検出範囲Dを持つ二次元レーザセンサ12を用い、成形ドラム50をドラム幅方向Xに移動させながら、成形ドラム50に巻き付けられたシート状部材70に対し、シート状部材70の全幅を含む範囲で二次元レーザセンサ12によりレーザ光Lを照射して、反射面までの距離データを取得し、得られた距離データに基づいてシート状部材70の幅方向両端部78,80の位置を求める。好ましくは、成形ドラム50の全幅を含む範囲で上記距離データを取得し、成形ドラム50の幅方向両端部62,64の位置も求めることである。また、シート状部材70の接合部76が二次元レーザセンサ12の検出範囲D内に入るように位置合わせした上で、上記距離データを取得して、接合部76を検査することが好ましい。
(もっと読む)
幅測定装置
【課題】安価でかつ信頼性の高い幅測定機能を有し、被測定物体の幅を高精度に測定することができる幅測定装置を提供する。
【解決手段】被測定物体1の上方より外側に配置され、その一方側にスリット状光を照射する光源2aと、そのスリット状光を撮像する一方側2次元撮像部4aと、被測定物体1の一端部28aの幅方向座標を演算する一端部幅方向座標演算部7aと、一端部高さ方向座標演算部8aと、一端部位置演算部9aと、被測定物体1の上方より外側でかつ光源2aと反対側に配置され、その他方側にスリット状光を照射する光源2bと、そのスリット状光を撮像する他方側2次元撮像部4bと、他端部28bの幅方向座標を演算する他端部幅方向座標演算部7bと、他端部高さ方向座標演算部8bと、他端部位置演算部9bと、一端部28aおよび他端部28bの空間位置に基づいて、被測定物体1の幅を演算する幅演算部10と、を備える。
(もっと読む)
レーザー高さ測定装置および部品実装機
【課題】正確に測定位置を制御でき、かつセンサの取り付け位置調整機構や位置調整作業を必要とせずに測定位置の制御精度を保つことができるレーザー高さ測定装置を提供する。
【解決手段】レーザー光L1を照射するレーザー光照射部61および対象物で反射されたレーザー光を検出する反射光検出部62を有するレーザー高さセンサ6と、レーザー高さセンサ6を平面内で移動させるセンサ移動機構(ヘッド駆動機構41〜43)と、所定の較正位置(光入射軸AO上)に配置された画像カメラ(部品カメラ5)と、レーザー光L1を減衰しつつ透過する減光フィルタ71と、レーザー高さセンサ6を較正位置AOに位置決めしてレーザー光L1を照射し、減光フィルタ71を透過したレーザー光を画像カメラ5で撮像してレーザー光画像を得るレーザー光撮像手段と、座標位置の補正値をレーザー光画像上でのレーザー光の位置に基づいて求める補正値取得手段と、を備える。
(もっと読む)
測定装置
【課題】内径の異なる種々の穴形状を精度良く測定できる測定装置を提供すること。
【解決手段】被測定領域の少なくとも一部の面の法線方向とは異なる方向から前記被測定領域に照明光を照射することで被測定領域に帯状の照明領域を形成する照明系と、前記照明系による照射方向と前記帯状の照明領域における長手方向等を含む面からはずれた位置から照明領域の散乱光を受光する受光系と、受光系の受光結果に基づいて被検面の形状を算出する演算部と、を備える。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】カメラ、レーザの相対位置を高精度で設置する必要がなく、また、測定レンジを複数種類を単一の測定プログラムにより変更する。
【解決手段】レーザ線条光照射部12と、既知形状の基準模様群を表示面に表示した座標変換テーブル作成用印刷表示板16と、照射部位の光切断面及びレーザ照射平面上に設置される表示板16を撮影するカメラ11と、表示板16の基準模様群を撮影したカメラ上の座標データを抽出する基準座標抽出手段131とから基準模様群の座標データと基準座標抽出手段131で抽出されたカメラ上の座標データとの対応関係を示す座標変換テーブル133を作成する。形状測定時には、表示板16を外して同じ位置に被測定物を配置させ、レーザ線条光を照射して照射部位の光切断面を撮影した画像から、点群抽出手段134により光切断面の点群を抽出する。抽出した点群座標を近似処理手段135により座標変換テーブル上の値に近似する。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】検出空間を拡張した場合でも、装置を大型化せずに対象物体の位置を精度よく検出することができる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10では、光源部12から検出光を出射した際、受光部13は対象物体Obからの反射光を第1受光素子131および第2受光素子132で受光する。第1受光素子131および第2受光素子132は、第1受光素子131の受光面131aに対する法線方向と第2受光素子132の受光面132aに対する法線方向との交差角度θcが90°を超え、180°未満となる値、好ましくは、120°を超え、140°未満となる値に設定されている。
(もっと読む)
変位センサシステム、センサ用コントローラ及び表示制御プログラム
【課題】複数の測定対象物それぞれの形状に応じた波形の比較を、作業者に簡易且つ正確にさせることが可能な技術を開示する。
【解決手段】変位センサシステム10は、変位センサ11、表示画面33Aを有する表示部33、制御回路30を備え、制御回路30は、変位センサ11から出力された測定信号SG3に基づき、複数のワークWそれぞれの形状に対応した複数の信号波形V1〜V4それぞれについて当該信号波形のうち基準レベルを示す部位である基準部位X1〜X4を抽出する抽出処理と、当該抽出処理で抽出された基準部位X1〜X4同士を一致させた状態で、複数の信号波形V1〜Vを表示画面33Aに表示させる表示処理とを実行する。
(もっと読む)
物体検出装置および情報取得装置
【課題】透過率の再現性が高い分光素子を用いながら、適正にレーザ光源の光量制御が可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、発光装置10と、受光装置20と、を備える。発光装置10は、レーザ光源110と、コリメータレンズ120と、リーケージミラー130と、リーケージミラー130によって反射されたレーザ光をドットパターンを有するレーザ光に変換するDOE140と、リーケージミラー130を透過したレーザ光を受光して受光量に応じた検出信号を出力するFMD160と、リーケージミラー130とFMD160との間に配置され、リーケージミラー130を透過したレーザ光の光量を減衰させるフィルタ150と、FMD160の検出信号に基づいて、レーザ光源110の発光量を制御するAPC制御部21bと、を有する。
(もっと読む)
形状計測方法
【課題】三次元計測器によって計測した点群データから計測対象物のmanifoldでかつ自己交差を含まない閉じた多面体データを生成する。
【解決手段】計測点群データに基づいて計測対象物の表面形状を表すサーフェイスを陰関数として作成する工程と、サーフェイスが存在する計測領域全体を三次元ドロネー図による分割処理により隙間なく、重複なく埋め尽くされた四面体の小領域(以下、セルという)に分割する工程と、セルの各頂点をサーフェイスの内側に存在する内点5と、外側に存在する外点6とに分類する工程と、境界セルを抽出する工程と、境界セルとサーフェイスとの交点7を計算する工程と、各境界セルが持つ交点7を繋ぎ合わせることにより三角形又は四角形の面を求める工程と、全ての面を結合する工程とを含むので、計測対象物のmanifoldでかつ自己交差を含まない閉じた多面体データを自動的に作成することができる。
(もっと読む)
裁断対象検査装置、裁断対象検査方法、裁断対象検査装置用のプログラム、および、裁断対象検査システム
【課題】多段積みされた裁断対象を精度良く検査できる裁断対象検査装置等を提供する。
【解決手段】多段積みされた裁断対象Bkを検査する裁断対象検査装置において、所定形状のレーザ光L1、L2が投影された裁断対象の画像データを取得し(S7)、画像データからレーザ光が投影された部分の画像を抽出し、抽出されたレーザ光の画像からレーザ光の投影形状の情報を算出し(S8)、所定形状の情報と投影形状の情報とに基づき、多段積みされた裁断対象の良否を判定する(S11)。
(もっと読む)
6軸測定系の原点出し用治具及び原点出し方法並びに固体撮像素子の相対位置調整方法
【課題】 原点出し用治具の設置再現性の問題を解決すると共に、原点出しを簡易にする。
【解決手段】 被測定対象物の煽り、高さ並びに平面位置及び平面回転位置の6軸を同時に検出できる6軸測定装置を用いて、6軸基準位置を設定するための原点出し用治具1であり、治具本体1aの面に、煽りの原点出しのための鏡面加工された第1の加工部2、高さの原点出しのための凹状の第2の加工部3並びに平面位置及び平面回転位置の原点出しのための穴状の第3の加工部4,5を設け、治具本体1aにはこの治具本体原点位置を位置決めするための穴からなる位置決め部6,7を設けてある。
(もっと読む)
3次元計測装置およびその方法
【課題】計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置を提供する。
【解決手段】撮像装置12により撮像された画像データを含む撮像情報を取得する撮像部11と、撮像情報に基づいて計測対象の3次元座標を取得する3次元形状演算処理部23と、撮像装置12の加速度および姿勢角度を含む位置姿勢情報を撮像情報の取得と同期して取得する位置姿勢計測部14と、位置姿勢情報に基づいて計測原点に対する撮像装置12の移動量・方向と姿勢角度の変化量・方向とを演算する位置姿勢補正処理部17と、撮像情報と同期して取得された撮像装置12の移動量および方向と姿勢角度の変化量および方向とに基づいて3次元形状演算処理部23により得られる3次元座標を平行移動および回転して複数の3次元座標を統合し、計測対象の3次元形状を取得する統合演算処理部24とを備えた。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】種々の撮影対象について、ステレオマッチングにおける誤対応をより正確に検出することが可能な画像処理装置、画像処理方法および画像処理プログラムを提供する
【解決手段】画像処理装置201は、撮影対象を異なる方向から撮影して得られた複数の画像について、複数の画像間における画素の対応付けを行なうことにより視差を算出するためのステレオマッチング部10と、ステレオマッチング部10によって算出された視差に基づいて、画像における各画素の位置を3次元座標系における3次元座標に変換するための3次元座標計算部20と、3次元座標計算部20によって変換された各画素の3次元座標に基づいて、ステレオマッチング部10によって行われた対応付けの誤りを検出するための誤対応検出部30とを備える。
(もっと読む)
物体識別装置及び物体識別プログラム
【課題】検知対象物の一部が他の障害物によって隠れているような状況下でも、その検知対象物の形状を正確に識別することができるようにする。
【解決手段】検知対象物上の各点の法線を算出する法線算出処理部3と、検知対象物上の各点を通過する直線を生成する直線生成処理部4と、3次元空間内の一定範囲の区切りである格子の中で、直線生成処理部4により生成された直線が通過する格子を特定する通過格子特定処理部5と、通過格子特定処理部5により特定された格子に対する投票を行う投票処理部6とを設け、形状推定処理部7が、3次元空間内の各格子に対する投票処理部6の投票結果から検知対象物の形状を推定する。
(もっと読む)
81 - 100 / 1,730
[ Back to top ]