
Fターム[2F065FF09]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 3角法 (1,730)
Fターム[2F065FF09]に分類される特許
41 - 60 / 1,730
空隙量測定装置及び空隙量測定方法
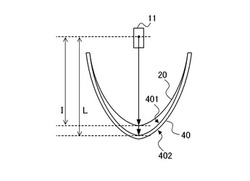
【課題】着用物の種別に関わらず身体との間の空隙量を正確に測定することのできる空隙量測定装置及び空隙量測定方法を提供すること。
【解決手段】空隙量測定装置1は、人体模型20を載置する台座部12及び測定対象物に対してレーザー光を投光することで当該測定対象物までの距離を測定するセンサ部11を備える距離測定装置10と、センサ部11のレーザー光を透過する部材で構成され、上部が開口するとともにその内部が空洞状に形成された人体模型20と、距離測定装置10が測定した距離から着用物と人体模型との間の空隙量を算出する演算装置30と、を備える。このとき、センサ部11は、人体模型20の内部から当該人体模型20に着用された着用物の着用面に対してレーザー光を投光することで着用面までの距離を測定し、演算装置30は、着用物の着用面までの距離から空隙量を算出する。
(もっと読む)
部品実装装置、および、三次元形状測定装置

【課題】影の影響を除去し正確に位相シフト法による三次元データを高速に取得する。
【解決手段】直交する第一方向と第二方向とに撮像画素が行列状に並ぶエリアイメージセンサ111を有するカメラ101と、カメラ101と測定対象物200とを第一方向に相対的かつ連続的に移動させる移動手段102と、第一アングルで第一周期光を照射する第一照射手段131と、第二アングルで第二周期光を照射する第二照射手段132と、第一照射時間と第二照射時間とが重ならないように制御する照射制御手段104と、エリアイメージセンサ111の複数の第一ライン171を用い、第一照射手段131が照射する際の対象部分の像を取得し、複数の第二ライン172を用い、第二照射手段132が照射する際の像を取得する像取得手段105とを備える。
(もっと読む)
3次元位置・姿勢認識装置およびその方法、プログラム
【課題】本発明は、対象体本来の形状のうち部分的な形状の情報を欠いた計測点群を用いる場合であっても、対象体の3次元位置・姿勢を適切に認識可能な3次元位置・姿勢認識装置およびその方法、プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、計測点群と、対応するモデル点群とをマッチングさせ、モデル点群のうち、マッチング結果に基づいて特定される点を削除処理するモデル処理手段10と、計測点群と、モデル処理手段10において削除処理したモデル点群とをマッチングさせ、対象体3の3次元位置・姿勢を認識する認識手段11とを備えることを特徴とする。
(もっと読む)
段差部認識装置
【課題】ステレオカメラにより取得されるステレオ画像を利用して、階段等の段差部の踏面の先端側エッジの空間的な位置及び方向を含む該段差部を配置位置を精度良く認識することができる装置を提供する。
【解決手段】カメラ3R,3Lのうちの基準画像に、複数条の演算処理領域R3min(k2)を設定すると共に、複数条の演算処理領域R3min(k2)のそれぞれにおける実エッジ投影線L52rの複数の候補位置v(k1)を設定し、各演算処理領域毎に、各候補位置の実エッジ投影線(段差部の先端側エッジの投影線)の位置に対する適合度を表す評価関数の値を射影変換を利用して算出する。実エッジ投影線を推定してなる推定エッジ投影線を、複数条の演算処理領域R3min(k2)のそれぞれにおける推定エッジ投影線の位置の適合度を合成してなる合成適合度が最も高くなるように決定する。推定エッジ投影線と段差部の踏面の平面パラメータとに基づいて段差部の空間的な配置を認識する。
(もっと読む)
操作装置
【課題】耐久性が高く、且つ、使用環境に関わらず入力操作の検出が可能な操作装置を提供する。
【解決手段】操作装置1に、入力操作の種別を示す操作パネル30と、操作パネル30の操作面31側に操作面31に沿って光を照射可能な発光部と、一次元配列された受光素子を有するラインセンサと、を備え、操作パネル30への入力操作が行われた場合には、入力操作を行う指で反射した発光部からの光の反射光をラインセンサで受光し、ラインセンサ上での受光位置と受光した光の強度とに基づいて指の位置を2次元的に推定する。
(もっと読む)
車載用カメラ
【課題】ローリングシャッタ法で駆動される2台の車載用カメラであって、車両から対象物までの距離を正確に測定することができる車載用カメラを提供する。
【解決手段】本発明の一実施形態に係る車載用カメラは、行列に配置された撮像素子を有し、隣接する行間のシャッタ時間に所定のずれ時間を有しつつ先頭行から最終行に向かって順次シャッタを切るXYアドレス読み出し法で駆動される2台の車載用カメラであって、2台の車載用カメラの中心を結ぶカメラ間中心線が路面となす角が垂直となるように、かつそれぞれの撮像素子の行方向がカメラ間中心線に平行となるとともにそれぞれの先頭行から最終行への向きが一致するように、車両に配置されるものである。
(もっと読む)
エゴモーション概算システムおよび方法
【課題】エゴモーション概算システムおよび方法の提供。
【解決手段】エゴモーション概算システムを利用してエゴモーションパラメータを決定するためのコンピュータ実施方法であって、第1の画像フレームおよび第2の画像フレームを取得することと、第1の画像フレームの第1の部分を選択して第1のサブ画像を取得し、かつ第2の画像フレームの第2の部分を選択して第2のサブ画像を取得することと、第1のサブ画像および第2のサブ画像に変換を実行して、それぞれ、第1の透視画像および第2の透視画像を取得することと、第2の透視画像を反復的に調整して複数の調整した透視画像を取得することと、第1の透視画像と複数の調整した透視画像との個々の差異それぞれに対応する複数の差分値を決定することと、複数の差分値のうちの1つに対応する、エゴモーションパラメータに関する並進ベクトルを決定することと、を含む、方法。
(もっと読む)
形状測定装置、形状測定方法、構造物製造システム及び構造物の製造方法
【課題】測定対象物の形状を高精度で測定できる形状測定装置、形状測定方法、及び構造物の製造方法を提供すること。
【解決手段】被測定物に所定の光量分布を有するパターン光を形成する照明部と、光が被測定物に照射される照射方向と異なる方向から被測定物に照射されたパターン光の像を撮像する撮像素子を含む撮像部と、像の撮像信号を評価する評価部と、評価部の評価結果に基づき撮像部の撮像結果に対して所定の処理を行うことで被測定物の位置情報を算出する処理部と、を備える形状測定装置に関する。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】安価な構成で、チャックのθ方向の傾きを精度良く検出して、基板のθ方向の位置決めを精度良く行う。
【解決手段】第1のステージに搭載されY方向(又はX方向)へ移動する第2のステージに第2の反射手段(35)を取り付け、第2の反射手段(35)のθ方向の位置ずれを検出する。チャック(10a,10b)に複数の光学式変位計(41)を設け、複数の光学式変位計(41)により、第2のステージに取り付けた第2の反射手段(35)までの距離を複数箇所で測定する。第2の反射手段のθ方向の位置ずれの検出結果に基づき、複数の光学式変位計(41)の測定結果から、チャック(10a,10b)のθ方向の傾きを検出し、検出結果に基づき、第3のステージによりチャック(10a,10b)をθ方向へ回転して、基板(1)のθ方向の位置決めを行う。
(もっと読む)
柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置
【課題】本願発明の課題は、柱状物体の空間情報を得るためには多くの労力と時間を要する、大量の柱状物体を漏れなく抽出することが難しい、あらかじめ柱状物体を認識しなければならない、といった問題を解決することであり、大量の計測データの中から、正確かつ短時間で、柱状物体を自動抽出する柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を提供することにある。
【解決手段】本願発明の柱状物体抽出方法は、計測点群から柱状物体を抽出する方法であり、計測点群からそれぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、細線化処理を行うことで立設物形状データを得る細線化工程と、主成分分析を行って固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、特徴量等に基づいて立設物の柱状判定を行う柱状物体判定工程を備える方法である。
(もっと読む)
ロボットシステム
【課題】スリット光の予測投影領域を最適化することによってロボットによるワークの取出作業の速度および精度を向上させることができるロボットシステムを提供すること。
【解決手段】実施形態の一態様に係るロボットシステムは、投影部と撮像部と予測投影領域決定部と投影位置検出部とロボットとを備える。投影部は、ワークが載置される載置領域へスリット光を投影して所定の移動方向へ移動させる。撮像部は、ワーク上を移動するスリット光を順次複数回撮像する。予測投影領域決定部は、撮像された画像を移動方向と交差する交差方向へ横断し、画像における交差方向の中央に近いほど移動方向と平行な方向の長さが長くなるように、画像におけるスリット光の予測投影領域を決定する。投影位置検出部は、予測投影領域の中からスリット光の投影位置を検出する。ロボットは、検出された投影位置に基づいてワークを把持する。
(もっと読む)
撮像装置、並びに、これを用いる画像解析装置及び移動装置
【課題】撮像領域内の各地点からの光に含まれる偏光成分間の大きさの違いを示す指標値に基づく画素値をもった偏光情報画像の高精度な解析処理を実現することを課題とする。
【解決手段】水平偏光成分P及び鉛直偏光成分Sの大きさの違いを示す差分偏光度(指標値)を算出し、算出した各指標値に基づく画素値をもった差分偏光度画像(偏光情報画像)を撮像するという撮像動作を連続して行うことで、露光量が互いに異なる例えば3種類の偏光情報画像を撮像する。そして、過去の撮像動作により撮像された3種類の偏光情報画像の中から、偏光成分間の大きさの違いが最大である特定の偏光情報画像を選定し、選定した特定の偏光情報画像に対応する露光量に基づいて後の撮像動作時の露光量を決定する。
(もっと読む)
マーカ、マーカ検出方法および装置
【課題】対象物が太陽光で照らされた屋外のように、多様性や変化に富んだ環境下において、画像中の対象物を10画素以下の少ない画素から、誤認することなく検出することができるマーカ、マーカ検出方法および装置を提供する。
【解決手段】対象物1の表面に取り付けたマーカ10であって、乱反射材からなる内層12と、内層の外側に取り付けられた偏光フィルムからなる外層14とを有し、外光2を乱反射し、地表に対し水平、垂直、又は斜めの偏光3に変換して放射する。
(もっと読む)
距離測定装置及び軌道周辺支障物検出装置
【課題】太陽光などの投光波長以外の光を極限まで制限して、投光波長のみを受光できるようにする。
【解決手段】干渉膜を使った平面板の干渉フィルタを用いて広い視野の検出手段を構成すると、平面板の干渉フィルタへの入射角に応じて透過帯域の移動が起こり、所望の信号強度を得ることが困難となる。この発明は、干渉フィルタの形状を球面状にして全視野の受光光線を干渉フィルタの入射面に対して垂直に入射するようにして、透過帯の移動をなくし、所望の信号強度を得るようにした。また、受光レンズの第一主点と球面状干渉フィルタの球面中心とを一致させて配置することにより、干渉フィルタへ入射する反射光の入射角を0°にして透過帯域が変化しないようにした。
(もっと読む)
画像処理装置およびその制御方法
【課題】 複数の視点から撮像した画像に基づいて、より広範囲における任意の被写体の位置情報を取得する。
【解決手段】 上記課題を解決するために、本発明の画像処理装置は、第一の画像と、前記第一の画像とは異なる視点から撮像した第二の画像とを取得する取得手段と、前記第一の画像および前記第二の画像それぞれにおける被写体の特徴点を検出する検出手段と、前記第一の画像および前記第二の画像に基づいて、前記被写体の位置情報を算出する算出手段とを有し、 前記算出手段は、前記第一の画像および前記第二の画像の両方において前記特徴点が検出された場合、前記特徴点それぞれに基づいて、前記位置情報および前記被写体に対応する被写体モデルを算出し、前記第一の画像および前記第二の画像のいずれかのみにおいて前記特徴点が検出された場合は、前記被写体モデルを参照して、前記情報を算出することを特徴とする。
(もっと読む)
ワーク位置検出システム
【課題】透明体であるワークの安定的な位置を検出することができるワーク位置検出システムを提供する。
【解決手段】透明体であるワークの端面が発光するように光を照射する少なくとも一つの投光部(21a〜21c)と、光によってワークの端面に生じた発光箇所を撮像する撮像部(22a、22b)と、撮像部による撮像結果に基づいてワークの位置を検出する検出部と、を有する。
(もっと読む)
光学式位置検出装置、位置検出システムおよび入力機能付き表示システム
【課題】検出光の進行方向および検出光の進行方向に交差する方向の双方における検出範囲を拡張することのできる光学式位置検出装置、位置検出システム、および入力機能付き表示システムを提供すること。
【解決手段】位置検出システム1において、光源部12は、検出光L2を放射状に出射するとともに、検出光L2の放射角度範囲において一方側から他方側に向かって強度が変化する光強度分布を形成し、受光部13は、光強度分布が形成された検出対象空間10Rに位置する対象物体Obで反射した検出光L2を受光する。光源はレーザー光源14であり、レーザー光源14から出射されたレーザー光(検出光L2)を可動ミラー11によって走査する。
(もっと読む)
立体感提示装置および方法ならびにぼけ画像生成処理装置,方法およびプログラム
【課題】片眼でも立体感を得ることができる立体感提示装置を提供する。
【解決手段】間隔をおいて配置された2台のカメラから出力されるステレオ画像データを構成する左右の画像データに基づいて距離画像データを生成する距離画像生成手段53と,生成された距離画像データを用いて,上記の左または右の画像データに,距離に応じた焦点ぼけを与えてぼけ画像データを生成するぼけ画像生成手段55を備える。生成されたぼけ画像データに基づいて対象の焦点ぼけ画像を表示装置に表示する。
(もっと読む)
変位測定装置及び光無線通信システム
【課題】光無線通信システムのトラッキング機構の小型化、測定精度向上等を実現する。
【解決手段】送信ユニット11に2つの距離センサ14,15を設け、受信ユニット21に位置指標部23と基準高さ部24を設ける。位置指標部23は、複数のエリアに区画され且つ各エリア毎に高さが異なる三次元形状に形成され、基準高さ部24を基準とした各エリアの高さとエリア位置との関係を変位測定テーブルデータとして記憶する。各距離センサ14,15によって位置指標部23の1つのエリアまでの距離と基準高さ部24までの距離をそれぞれ測定し、これら2つの距離測定値の差分と変位測定テーブルデータとに基づいて位置指標部23のうちの第1の距離センサ14で測定したエリア位置を特定することで、受信ユニット21の変位量及び変位方向を判定し、その判定結果に基づいて送信部12と受信部22との光軸ずれを補正するように光軸ずれ補正機能を作動させる。
(もっと読む)
画像処理方法、ステレオカメラシステム
【課題】より短い処理時間で距離情報が得られる画像処理方法を提供すること。
【解決手段】第1の画像と第2の画像を撮影するステップと、加算手段241が、第1の画像の第1の合計値、及び、第2の画像の第2の合計値を算出する合計値算出ステップと、シフト手段242が記第1の合計値を所定ビット数、右にシフトして第1の近似平均値を算出し、同様に第2の近似平均値を算出する近似平均値算出ステップと、整数倍手段243,244が、第1の画像と第2の画像の小領域内の各画素データの値を整数倍する整数倍ステップと、相関値算出手段249が、該画素データの値を整数倍した値から第1の近似平均値を引いた第1のデータと、画素データを整数倍した値から第2の近似平均値を引いた第2のデータをそれぞれ求め、画素データ毎に前記第1のデータと第2のデータとの差分の二乗和を算出する相関値算出ステップと、を有する画像処理方法を提供する。
(もっと読む)
41 - 60 / 1,730
[ Back to top ]