
Fターム[2F065FF10]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 合焦法 (713)
Fターム[2F065FF10]に分類される特許
21 - 40 / 713
高さ計測装置及び方法
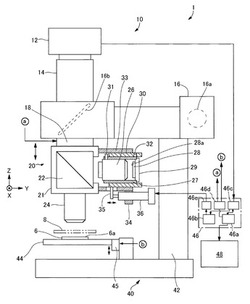
【課題】被計測物が様々な屈折率で、かつ様々な厚さの透明媒質の下に配置されていても、その被計測物の高さを容易に計測する。
【解決手段】高さ計測装置1は、照明光から分岐された第1照明光を被計測物6に導く対物レンズ24と、照明光から分岐された第2照明光を参照ミラー28に導く対物レンズ26と、第2照明光の光路長を調整する移動部36と、被計測物6及び参照ミラー28で反射される2つの照明光の干渉像を撮像する高速度カメラ12と、対物レンズ24と被計測物6とを光軸方向に相対移動するピエゾ駆動装置18と、を備える。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、デバイス製造方法、計測方法、並びに位置計測システム

【課題】面位置センサの設置位置を計測し、該計測された設置位置に基づいて面位置センサを用いて移動体の2次元移動面の垂直方向と傾斜方向の位置座標を計測することにより、移動体を安定かつ高精度に駆動する。
【解決手段】 干渉計システムを用いてウエハステージWSTのXY位置を監視しながらウエハステージを移動させて、面位置センサ72k,74i,76jを用いてYスケール39Y3,39Y4を、X軸方向及びY軸方向に走査することにより、面位置センサのXY設置位置を計測する。得られた設置位置情報に基づいて、面位置センサを用いて、ウエハステージのXY平面(移動面)に対する垂直方向と傾斜方向の位置座標を計測することにより、ウエハステージを安定かつ高精度に駆動する。
(もっと読む)
3次元シーンの要素の奥行きを評価する装置
【課題】3次元シーンに分布した被写体要素(object element)の奥行きを評価するための有利な装置を提案すること。
【解決手段】装置は、光学系であって、それ自体が、複数の画素21、22、23を有する光センサ2、および光センサの画素の1つの上にシーンの要素E1、E2、E3を結像できるレンズ1を備える光学系と、この要素からきてビットマップ方式の光センサの画素のうちの1つによって取り込まれた光のストリームの最大値に着目することによって焦点を調整できるシーンの要素のいずれか1つに光学系の焦点を調整する手段と、この焦点の調節からこの要素の奥行きを推定するのに適した手段とを備える。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】光学系の高さを低くするとともに、回折格子からの0次光の影響を低減して計測精度を向上する。
【解決手段】X軸のエンコーダ10Xは、第1部材6に設けられ、X方向を周期方向とする回折格子12Xと、可干渉性のある計測光MX1及び参照光RX1を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1を回折格子12Xに向けてリトロー角から所定角度ずれた角度で反射する傾斜ミラー32XAと、回折格子12Xからの回折光と参照光RX1との干渉光を検出する光電センサ40XAと、光電センサ40XAの検出信号を用いて第1部材6に対する第2部材7のX方向の相対移動量を求める計測演算部42Xと、を備える。
(もっと読む)
走査型検出測定装置、及び測定方法
【課題】簡素な構成を採用しつつ検出光量ムラの発生を抑制可能とした走査型検出測定装置を提供する。
【解決手段】本発明の走査型検出測定装置は、レーザ光を射出する発光素子と、発光素子から供給されるレーザ光を走査しつつ標本に照射する走査光学系と、標本から生じる光を検出する検出光学系と、発光素子と走査光学系との間に設けられレーザ光の一部を発光素子に向けて反射させる反射光学素子と、を有することを特徴とする。
(もっと読む)
三次元画像取得装置および三次元画像取得方法
【課題】対物レンズの被計測体側に配設された光学素子によりスポット位置を光軸に垂直な面内方向に走査することができるとともにこの光学素子による光学系全体の結像性能の劣化を抑えることができる三次元画像取得装置および三次元画像取得方法を提供する。
【解決手段】三次元画像取得装置10は、共焦点光学系を用いた三次元画像取得装置であって、対物レンズ13の被計測体15側の光軸と交差するよう配設された平行平板形の部材を有し、光軸と垂直な面に対する平行平板形の部材の傾きを異ならせることで、傾きに応じて屈折作用により被計測体側共役点の位置を光軸方向に垂直な面内で変更するXY方向焦点位置変更部14を備え、平行平板形の部材の傾きは、対物レンズ13の被計測体側共役点に集光される光の直径が、エアリーディスク直径の半分となる所定の傾き以下である。
(もっと読む)
測定装置、形状測定装置、形状測定方法、及び構造物の製造方法
【課題】凹部の内側の情報に関する測定精度を向上させる。
【解決手段】形状測定装置は、撮像素子5と、複数の光学素子を含み、撮像素子5と共役な共役面10を、複数の光学素子の配列方向に対して鋭角または鈍角の関係となるように形成する結像光学系6と、測定対象面に対して結像光学系6の少なくとも一部を移動可能な走査部と、走査部の位置情報及び撮像素子5の画像情報に基づいて、測定対象面の位置情報を取得する位置情報取得部と、を備える。
(もっと読む)
形状測定装置、及び形状測定方法
【課題】試料を詳細かつ適切に評価することができる形状測定装置、及び形状測定方法を提供する。
【解決手段】本発明の一態様にかかる形状測定装置は、観察窓51と、基板54とを有する試料保持ユニット11と、観察窓51又は基板54を介して、試料53を加圧するシリンダ56、57と、試料51の形状を測定するため試料51を照明するとともに、照明光の焦点位置を光軸方向に走査可能な共焦点光学系30と、共焦点光学系30を介して、試料保持ユニット11に保持された試料からの反射光を検出するラインセンサ15〜17と、焦点位置を光軸方向に走査した時での検出結果によって、形状を測定する処理部18と、を備え、観察窓51の表面51aに焦点位置を合わせて、観察窓51の表面形状を測定するものである。
(もっと読む)
撮像装置およびその制御方法
【課題】表面形状の計測処理を効率的に行い、撮像装置のスループットを向上させる技術を提供する。
【解決手段】撮像装置が、被写体を保持する保持手段と、前記被写体の表面形状を計測する表面形状計測手段と、前記表面形状計測手段により計測された表面形状に合わせて撮像面を調整して、前記被写体の撮像を行う撮像手段と、前記被写体の全体領域のなかから撮像すべき対象物が存在する存在領域を特定する特定手段とを備える。前記表面形状計測手段は、前記特定手段により特定された存在領域の表面形状のみを計測する。
(もっと読む)
部品高さ測定方法およびその装置
【課題】
周辺を壁で囲まれた凹型形状の被測定部品においても、内側形状を正確に計測することで、被測定部品の高さ及び体積を求めることができるようにする。
【解決手段】
載置面上に被測定部品を載置して被測定部品の高さ方向に移動可能なテーブルの載置面に垂直な方向から載置面上に載置された被測定部品に対物レンズを介して光パターンを投影し、テーブルを被測定部品の高さ方向に順次スッテプ移動させて各ステップ移動ごとに光パターンが投影された被測定部品を対物レンズを介して撮像して光パターンの画像を取得し、テーブルの各ステップ移動ごとに撮像して取得した光パターンの複数の画像を処理して被測定部品の各部の高さ情報を得て被測定部品の高さ画像または高さ情報を含む画像を生成して部品高さを測定するようにした。
(もっと読む)
そり測定方法及びそり測定装置
【課題】プリント配線板等のそり測定において、測定精度の向上と測定時間の短縮が可能なそり測定方法を提供するとともに、量産機として使用できるそり測定装置を提供する。
【解決手段】平面度が300μm以下である平滑板上に、測定対象物を積載して、測定対象物の平面度を測定するそり測定方法。また、このそり測定方法により、測定対象物の平面度を測定する、好ましくはインライン化されたそり測定装置。
(もっと読む)
受光装置
【課題】ラインイメージセンサーと同等の機能を有する比較的安価な受光装置を提供する。
【解決手段】検出領域における光を検出するための受光装置であって、ホトデテクターと、ホトデテクターに入光する光を規制する開孔を有するマスクを備えた受光手段と、受光手段を検出領域に渡り移送せしめる移動手段と、受光手段の移動位置を検出する位置検出手段とを具備している。
(もっと読む)
パターン形成装置及びパターン形成方法、移動体駆動システム及び移動体駆動方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】パターンが形成される物体を保持する移動体を安定して位置制御する。
【解決手段】露光装置は、ウエハを保持して所定平面内で移動するウエハステージと、所定平面内でウエハステージとは独立に移動する計測ステージと、計測ステージの位置情報を計測する干渉計システム118と、ウエハステージの位置情報を計測する、干渉計システム118に比べて計測値の短期安定性が優れるエンコーダシステム(70A〜70F)と、を備えている。このため、露光装置によると、干渉計システム118により計測ステージの位置情報が計測され、エンコーダシステム(70A〜70F)によってウエハステージWSTの位置情報が計測される。従って、パターンが形成されるウエハを保持するウエハステージを安定して位置制御することが可能となる。
(もっと読む)
3次元計測装置
【課題】反射率の低い被計測物であっても輪郭を正確に計測することができる3次元計測装置を提供する。
【解決手段】
所定の波長領域を有する光を照射し被測定物で反射した反射光と基準反射光との干渉光の各波長の光強度を検出して分光干渉波形を求め、分光干渉波形と理論上の波形関数に基づいて波形解析を実行する制御手段を具備する3次元計測装置であって、被計測面が対物レンズの集光点位置と一致するように予め波形解析後の光強度のピーク位置と共焦点位置の対応をとっておき、制御手段はイメージセンサーからの検出信号に基づいて分光干渉波形を求め、分光干渉波形と理論上の波形関数に基づいて波形解析を実行し、対物レンズの集光点位置に対応する光強度を位置付け手段によって特定されたX、Y座標におけるZ座標の光強度としてメモリに保存し、該メモリに保存されたX、Y、Z座標に基づいて3次元画像を形成する。
(もっと読む)
変位センサ
【課題】駆動装置を用いることなく、小型であっても、高精度で計測対象物の変位を測定することができる変位センサを提供する。
【解決手段】光源部を有する投光部と、光源部が出射する光を、計測対象物へ向けて集光して照射する照射部と、計測対象物で照射されて反射された光を集光して受光する第1受光部とを具備する光学系を備える変位センサであって、投光部は、光源部と、第1レンズと、第1ハーフミラーとを具備し、照射部は、第1ハーフミラーと、第2レンズとを具備し、第1受光部は、第1ハーフミラーと、少なくとも4つの穴を有し、この4つの穴はそれぞれxy軸上に配置されているスリット板と、第3レンズと、第1受光素子とを具備し、照射部及び第1受光部は、照射部の光軸と第1受光部の光軸とが一致するように配置され、投光部は、該投光部の光軸が照射部及び前記第1受光部の光軸と垂直に交わるように第1ハーフミラーを介して配置する。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】精度良く三次元モデルを作成する。
【解決手段】画像受付部11は、被写体を異なる角度から複数回撮像することにより得られる複数の画像の組の入力を受け付ける。三次元モデル生成部12は、受け付けられた複数の画像の組のそれぞれに基づいて、被写体の三次元モデルを複数生成する。三次元モデル選択部13は、被合成三次元モデルと合成三次元モデルとを選択する。特徴点抽出部14は、被合成三次元モデルと合成三次元モデルから、複数の第1特徴点と第2特徴点を抽出する。特徴点選択部15は、抽出された複数の第1特徴点と第2特徴点の中から、ステレオカメラ1との距離が近い特徴点を優先的に選択する。座標変換パラメータ取得部16は、座標変換パラメータを取得する。座標変換部17は、合成三次元モデルの座標を被合成三次元モデルの座標系の座標に変換する。三次元モデル合成部18は、合成三次元モデルを被合成三次元モデルに合成する。
(もっと読む)
パターン検査方法およびパターン検査装置
【課題】同一仕様で形成され同一方法で保持された複数の平面基板上の、同一箇所に形成された同一パターンの形状を確実に順次検査するための簡単な方法を提供すること。
【解決手段】1枚目の検査対象基板に対して、検査のためのカメラと検査対象となるパターンとの撮像距離を順次変化させて各撮像距離で撮像して合計で複数の画像情報を入力し、入力した複数の画像情報を予め登録してある登録画像情報と比較して、登録画像情報に最も類似した一画像の情報を複数の画像情報の中から選択して、検査判定するとともに、選択した画像情報に対応する撮像距離をカメラ最適高さとして特定し、2枚目以降の平面基板上の同一箇所に形成された同一パターンの形状検査において、カメラ最適高さとした撮像距離で検査することを特徴とするパターン検査方法。
(もっと読む)
画像合成のための3次元プロファイルマップの作成方法
【課題】光学顕微鏡を用いて、一つの立体的な試料に対して、焦点距離の異なる多数の画像を得、これらの画像を組み合わせて、全領域の焦点が合った1枚の2次元合成画像を得るため、試料の高さ情報を表示する3次元プロファイルマップの作成方法を提供する。
【解決手段】試料を異なる高さから撮像して、焦点部位の異なる2次元試料画像を得、離散ウェーブレット変換を行うことにより得られた詳細サブーバンドにおいて、最大の詳細サブーバンド係数値を示す画像の撮像高さで、初期の高さ地図を作成し、それぞれの入力画像において、焦点整合度を計算し、フィルターをかけて、非合焦点のピクセル(非境界点)の高さ情報は除去し、除去されたピクセル(非境界点)の高さを、フィルターを通過したピクセル(境界点)の高さ値から内挿して算出し、前記高さ情報の除去されたピクセルに対して前記内挿によって算出された高さを代入して高さ地図を作成する。
(もっと読む)
変位検出装置
【課題】光源からの光を回折格子が設けられた領域で反射させて、被測定面の変位を検出する変位検出装置を提供する。
【解決手段】変位検出装置1は、光源2と、対物レンズ3と、分離光学系4と、コリメータレンズ7と、非点収差発生部8と、受光部9と、位置情報生成部10と、絞り部材11とを備えている。そして、対物レンズ3から出射され、被測定面に向けて集光される光の光軸に対する角度をθ、光源2の波長をλ、被測定面101に形成された回折格子のピッチをd、回折格子による回折光の次数をnとした場合に、遮蔽部11は、
を満たす反射光を遮蔽する。
(もっと読む)
21 - 40 / 713
[ Back to top ]