
Fターム[2F065GG05]の内容
光学的手段による測長装置 (194,290) | 光源 (11,799) | 光源種類 (7,431) | レーザ (3,902) | ガスレーザ (201)
Fターム[2F065GG05]に分類される特許
1 - 20 / 201
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
トレンチ深さ測定装置及びトレンチ深さ測定方法並びに共焦点顕微鏡
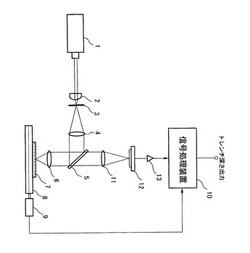
【課題】トレンチ幅が照明光の波長と同程度の高アスペクト比のトレンチの深さを測定できるトレンチ深さ測定装置を実現する。
【解決手段】照明光学系は、ライン状の照明ビームを発生する光源装置1〜4及びライン状の照明ビームを前記試料に向けて投射する対物レンズ6を有し、光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成する。ライン状の瞳パターンは対物レンズを介してトレンチが形成されている試料表面7にトレンチと交差するようにライン状の照明エリアを形成する。また、照明光として直線偏光した照明光を用い、その電界ベクトルの方向は、トレンチの長手方向に対してほぼ平行に設定する。直線偏光した照明光の電界ベクトルの方向をトレンチの長手方向に設定することにより、トレンチにおける光損失が減少し、トレンチの内部に照明光を進入させることでき、高精度な深さ測定が可能になる。
(もっと読む)
角度測定方法及び角度測定システム

【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】エンコーダ本体2aに対する回転軸3の相対的な回転角を検出するロータリエンコーダ2と、エンコーダ本体2a及び回転軸3から切り離され、エンコーダ本体2aの回転角を検出する非接触角度検出手段20(レーザ干渉式検出手段)とを備える。これにより、ロータリエンコーダ2が検出した回転角を、非接触角度検出手段20で検出した回転角に基づいて補正することができ、回転角を高精度且つ短時間で測定することが可能となる。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】回折格子を用いて計測を行う際に、相対位置を予め定められた相対位置からの絶対位置として容易に計測する。
【解決手段】エンコーダ10Xは、第1部材6に設けられ、格子パターン12Xa及び基準パターン13XAが形成された回折格子12Xと、計測光MX1,MX2を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1,MX2を格子パターン面12Xbにθy方向(X方向)に対称な角度で傾斜させて入射させる傾斜ミラー32X,34Xと、計測光MX1,MX2の回折格子12Xによる回折光DX2,EX2を受光する光電センサ40XA,40XBと、を有する。
(もっと読む)
観察装置
【課題】高速に移動する対象物の像を得ることができる観察装置を提供することを目的とする。
【解決手段】観察装置1は、光源部10、周波数変調部20、検出部40、及び演算部50を備える。周波数変調部は、第1の光又は第2の光を入力して、当該入力した光を、第1方向において互いに異なる複数の特定周波数Ωnだけ遷移された周波数を有し、第2方向において同一の周波数を有する光に変調する。検出部40は、対象物2で生じた散乱光のうち、検出部40に到達した光を検出し、ドップラーシフト量に応じた周波数で時間的に変化する散乱光のデータを、各時刻に出力する。演算部50は、検出部40からの出力に対して、特定周波数Ωnに基づいて複数の周波数領域に分割する処理と、時刻変数に関する1次元フーリエ変換と、周波数に関する1次元フーリエ変換とを行って得られたデータを対象物2の像として得る。
(もっと読む)
板状体の検出装置とケースポート及び保管装置
【課題】 板状体の正面を塞がずに、かつ光源と受光素子とを備えている投受光センサを用いて、板状体を確実に検出する。
【構成】 検出装置は板状体が所定位置に存在するか否かを検出する。検出装置は、板状体の一側面へ向けて斜めにスポット状の検出光を投光する光源と反射光を受光する受光素子とを備えている投受光センサと、投受光センサから見て板状体よりも遠方にあり、かつ板状体が存在しない場合、検出光を拡散反射する拡散反射部と、投受光センサへ入射する反射光の所定の強度以下であることから、板状体を検出する検出部、とを備えている。板状体の側面が透明の場合、板状体の側面へ入射した検出光は板状体の内部で複数回反射し投受光センサとは異なる方向へ出射し、板状体の側面が鏡面状の反射面の場合、板状体の側面へ検出光は斜めに入射して投受光センサとは異なる方向へ正反射する。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】回折格子を用いて計測する際に、干渉用の光学系をコンパクトに配置可能として、かつ格子パターン面の高さ変化に対する干渉光強度の低下を抑制する。
【解決手段】エンコーダ10Xは、第1部材6に設けられたX軸の回折格子12Xと、計測光MX1,MX2を回折格子12Xの格子パターン面12Xbにほぼ垂直に入射させるレーザ光源16と、第2部材7に設けられて、回折格子12Xから計測光MX1によって発生する回折光DX1を回折格子12Xに再度入射させる直角プリズム26Aと、回折光DX1によって発生する回折光DX2と他の回折光EX2との干渉光を検出する光電センサ40Xと、を備える。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】光学系の高さを低くするとともに、回折格子からの0次光の影響を低減して計測精度を向上する。
【解決手段】X軸のエンコーダ10Xは、第1部材6に設けられ、X方向を周期方向とする回折格子12Xと、可干渉性のある計測光MX1及び参照光RX1を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1を回折格子12Xに向けてリトロー角から所定角度ずれた角度で反射する傾斜ミラー32XAと、回折格子12Xからの回折光と参照光RX1との干渉光を検出する光電センサ40XAと、光電センサ40XAの検出信号を用いて第1部材6に対する第2部材7のX方向の相対移動量を求める計測演算部42Xと、を備える。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転が規制された非回転体であるエンコーダ本体2aと、エンコーダ本体2aに回転自在に軸支された回転体である回転軸3とを有し、エンコーダ本体2aに対する回転軸3の相対的な回転角度を検出する相対的角度検出手段としてのロータリエンコーダ2と、エンコーダ本体2aの絶対的な回転角度を検出する絶対角度検出手段としての非接触角度検出手段20とを備える。これにより、ロータリエンコーダ2が検出した回転角度を、非接触角度検出手段20で検出した回転角度に基づいて補正することができ、回転角度を高精度且つ短時間で測定することが可能となる。
(もっと読む)
変位・ひずみ分布計測光学系と計測手法
【課題】安価で小型の変位・ひずみ分布計測光学系と計測手段を提供すること。
【解決手段】複数の撮像素子を使用することで、光学素子の数を減らし、2次元の変位・ひずみ分布計測を行うことができる装置を小型にすることができる。さらに、計測対象物の近傍に鏡を設置することにより、撮像素子の数を減らし、さらに小型の装置とすることができる。
(もっと読む)
表面性状評価方法
【課題】被検体の表面から反射光が得られないような場合であっても、被検体の表面性状を確実に測定でき、歩留まり及び製造効率の向上を図ることができる表面性状評価方法を提供する。
【解決手段】ウエハWをセットしていない状態において、第1参照平面56で反射された第1参照光と、ウエハWをセットした状態において、ウエハWを透過して後に第1参照平面56で反射された被検光と、に基づいてウエハWの表面性状を評価することを特徴とする。
(もっと読む)
表面計測方法とその装置
【課題】対象物の変化量あるいは移動量を外乱の影響なく高精度に求めることが可能な変位計測方法とその装置を提供する。
【解決手段】4つの位相シフト光路を、4分割プリズムとアレイ状に配置したフォトニック結晶λ/4素子及びフォトニック結晶偏光素子とを組み合わせて空間的に並列生成する構成とすることにより、小形の光干渉変位センサを構築し、適用対象を拡大すると共に外乱の影響を受けることなく、対象物の微小変位や表面凹凸をサブナノメートル以下の分解能でかつ高い再現性で測定する。
(もっと読む)
路面平坦性測定装置
【課題】高速道路や普通の道路等の路面を走る自動車に、通常の走行速度で走行させつつ路面の平坦性が測定できるようにした路面平坦性測定装置を提供する。
【解決手段】本発明の路面平坦性測定装置は、自動車の走行方向に沿った3個所に、それぞれ路面までの高さを測定するレーザ測距器を備え、該レーザ測距器のうち、前後2つの測距値を結んだ基準線に対する中間の1つの測距値の変動により路面の形状を測定することを特徴とし、自動車を通常の走行速度で走らせながら路面の平坦性を測定でき、しかも、車上や車内にパソコン等のデータ処理ユニット及びその付属機器を搭載でき、測定する路面上の距離に限界がなく、測定が短時間で済み、時間と労力が大いに節約できるようにしている。また、各レーザ測距器はトラックの荷台下の空間に設置し、機器類を荷台上に搭載できるようにし、自動車の車輪を距離測定エンコーダに利用できるようにしている。
(もっと読む)
検査装置および方法、リソグラフィ装置、リソグラフィ処理セル、およびデバイス製造方法
【課題】オーバーレイ測定、非対称性測定、およびインダイオーバーレイターゲットの再構築を可能にする。
【解決手段】四分くさび光デバイス(QW)は、基板から散乱した放射の回折次数を別々に再誘導し、第1方向および第2方向の各々に沿って照明から回折次数を分離する。例えば、0次(0、0’)および1次(−1、+1’)を、各入射方向について分離する。マルチモードファイバ(MF)での捕捉の後、スペクトロメータ(S1−S4)を使用して波長(I0’(λ)、I0(λ)、I+1’(λ)、およびI−1(λ))の関数としての空間的に再誘導された回折次数の強度を測定する。そして、これをオーバーレイエラーの計算、または単一格子の非対称パラメータの再構築に用いる。
(もっと読む)
被検面形状測定方法および被検面形状測定装置と被検面形状測定プログラム
【課題】干渉計の撮像素子から出力される被検面のシェア像を利用し、被検面の形状に関わりなく其の実面形状を直接的に把握すること。
【解決手段】波面分布面Wを区画して得た各微小セルW1〜WC1毎の波面分布面側法線k1〜kC1の各々が干渉計1による測定時に被検体13の球心Oに収束する光路を辿って被検面13aに入射した照明光(入射光)の何れかの反射光の光路と一致することに基いて、波面分布面Wの微小セルW1〜WC1における波面分布面側法線k1〜kC1すなわち被検面13aからの反射光に相当する波面分布面側法線k1〜kC1毎に、これに対応する照明光波面側法線l1〜lC1つまり入射光の光路を突き止め、これら2つの光路すなわち波面分布面側法線k1〜kC1と照明光波面側法線l1〜lC1の交点位置R(1)〜R(C1)を求めて被検面13aの実面形状のデータとする。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転駆動される被測定物1の回転軸1aにロータリエンコーダ2の回転軸3を取り付けるとともに、被測定物1の回転軸1aとロータリエンコーダ2の回転軸3との偏心を許容するように、ロータリエンコーダ2の回転軸3に直交する面内におけるエンコーダ本体2aの変位を一定の遊び範囲内に規制し、被測定物1の回転軸1aに対するロータリエンコーダ2の回転軸3の偏心量を非接触で検出し、ロータリエンコーダ2の読取部の読み取ったコードに基づいてロータリエンコーダ2の回転軸3の回転角度を測定し、ロータリエンコーダ2を用いて測定された回転角度を、少なくとも前記検出された偏心量に基づいて、補正する。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転駆動される被測定物1の回転軸1aにロータリエンコーダ2の回転軸3を取り付けるとともに、被測定物1の回転軸1aとロータリエンコーダ2の回転軸3との偏心を許容するように、ロータリエンコーダ2の回転軸3に直交する面内におけるエンコーダ本体2aの変位を一定の遊び範囲内に規制し、ロータリエンコーダ2のエンコーダ読取ヘッドの読み取ったコードに基づいてロータリエンコーダ2の回転軸3の回転角度を測定するとともに、非接触角度検出手段20によりロータリエンコーダ2の回転軸3の回転角度測定開始時点からのエンコーダ本体2aの変化した角度を検出し、ロータリエンコーダ2を用いて測定された回転角度を非接触角度検出手段20で検出されたエンコーダ本体2aの変化した角度に基づいて補正する。
(もっと読む)
測距方法及びレーザ測距装置
【課題】レーザ光の特徴である可干渉性を利用しながら、光学系に機械的手段を用いずに被測定物に関する測距を高精度に行う測距方法及びレーザ測距装置を提供する。
【解決手段】反射部14を所定の角度θだけ傾けて設置することで、参照光の光路長を光路内で連続的に変化させることができる。これにより、受光部18が受光する測定光と参照光による干渉光には干渉縞が形成され、この受光部18の各受光器の光強度データに基づいて明暗データを作成することができる。そして、この明暗データに基づいて測距を行うため、光学系に機械的手段を用いずに被測定物に関する測距を高精度に行うことができる。
(もっと読む)
像内の構造の位置を決定する方法及び該方法を実施するための位置測定装置
【課題】基準点に対する像内の構造の位置を決定する方法、更に、この方法を実施するための位置測定装置を提供する。
【解決手段】対称中心を有する構造の基準点に対する像内の位置を決定する方法を提供し、本方法は、構造を含み、かつ基準点を有する像を準備する段階と、基準点に対する像の少なくとも1つの対称操作を実施し、それによって構造に対して合同である鏡像反転構造を有する少なくとも1つの鏡像が得られる段階と、構造と1つの鏡像反転構造又は2つの鏡像反転構造との間の少なくとも1つの変位ベクトルを決定する段階と、構造の位置を少なくとも1つの変位ベクトルから基準点に対する構造の対称中心の位置として計算する段階とを含む。更に、基準点に対する像内の構造の位置を決定するための位置測定装置を提供する。
(もっと読む)
検査装置
【課題】ウエハ検査装置でベアウエハ(鏡面ウエハ)を検査する場合、ウエハ上には何もマークがないため、ベアウエハを正しく位置決めできない。
【解決手段】本発明は、前記基板を移動する搬送系と、前記基板に光を照射する照明光学系と、前記基板からの光を検出する検出光学系と、前記検出光学系の検出結果に基づいて前記基板の欠陥を検出する第1の処理部と、前記検出光学系の検出結果に基づいて画像を取得する第2の処理部とを有し、前記第2の処理部は、前記基板の外周部の画像、及び前記基板のノッチ部の画像を取得し、前記外周部の画像に基づいて、前記基板の中心位置を計算し、前記中心位置、及び前記ノッチ部の画像に基づいて、前記基板の回転ずれを計算し、前記搬送系は、前記中心位置、及び前記基板の回転ずれに基づいて前記基板の位置決めを行うことを特徴とする。
(もっと読む)
1 - 20 / 201
[ Back to top ]