
Fターム[2F065JJ08]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 配置;方向 (2,894) | 被測定物に対し斜め (917)
Fターム[2F065JJ08]に分類される特許
901 - 917 / 917
タッチ面に対応するポインタを検出するための装置及び方法
タッチ面(54、254、354)に対するポインタを検出する装置(50)は、タッチ面を包含して重なり合う視界を有し、間隔を置いて配置された少なくとも2つの撮像組立体(58)を有する。撮像組立体は、タッチ面を3次元で斜視図として見る。撮像組立体は、異なる位置からの重なり合う画像を捕捉する。プロセッサ(60)は、タッチ面に対するポインタの位置を決定するために、少なくとも1つの撮像組立体により生成された画像データを受信し、処理する。  (もっと読む)
(もっと読む)
波面操作および改良3D測定方法および装置

【課題】 光学システムにおいて、位相および振幅情報を含む波面分析、ならびに3D測定を実行する方法および装置、特に、光学システムの画像面のような、中間面の出力の分析に基づく方法および装置を提供する。
【解決手段】 薄膜コーティング、または多層構造の個々の層が存在する表面トポグラフィの測定について記載する。多重波長分析を、位相および振幅マッピングと組み合わせて利用する。マクスウェルの方程式の解に基づき、仮想波面伝搬を用いて、波面伝搬および再合焦によって位相および表面トポグラフィの測定を改良する方法について記載する。このような位相操作方法によって、または広帯域およびコヒーレント光源の組み合わせを利用する方法によって、光学撮像システムにおいてコヒーレント・ノイズの低減を達成する。本方法は、集積回路の分析に適用され、コントラストを高めることにより、または1回のショット撮像における3D撮像によってオーバーレイ測定技法を改善する。
(もっと読む)
パンタグラフのすり板検査装置。

【課題】
従来のカメラによるパンタグラフすり板の検査では、すり板側面の照明を当ててパンタグラフを撮像していたが、この方法では、すり板上面と側面を高精度に分離することが難しかった。
【解決手段】
カメラでパンタグラフを撮像する際に、パンタグラフすり板上面を照射するストロボ照明と、パンタすり板側面を照射するストロボ照明を設け、すり板上面を照射するストロボ光に比べてすり板側面を照射するストロボ光の光量を少なくして撮像する構成とした。
(もっと読む)
光波散乱測定データに基づいてプロセスパラメータ値を決定する方法
一実施形態による方法には、あるキャリブレーション基板上に設けられた複数のマーカ構造体の組から、光学的検出装置によりキャリブレーション測定データを得るステップが含まれる。各マーカ構造体の組は、プロセスパラメータの異なる既知の値を用いて生成された、少なくとも1つのキャリブレーションマーカ構造体を含む。この方法には、基板上に設けられ、プロセスパラメータの未知の値を用いて露光される少なくとも1つのマーカ構造体から光学的検出装置を用いて測定データを得るステップと、プロセスパラメータの既知の値およびキャリブレーション測定データに基づくモデルにおいて回帰係数を用いることにより得られた測定データからプロセスパラメータの未知の値を決定するステップとを含む。  (もっと読む)
(もっと読む)
連続変化するオフセットマークと、オーバレイ決定方法
【課題】
【解決手段】本発明は、オーバレイマークと、オーバレイ誤差を決定する方法とに関する。本発明の一態様は、連続的に変化するオフセットマークに関する。連続的に変化するオフセットマークは、位置の関数として変化するオフセットを有する周期構造を重ね合わせた1つのマークである。例えば、周期構造は、ピッチなどの格子特性に関する値が異なる格子に対応してよい。本発明の別の態様は、連続的に変化するオフセットマークからオーバレイ誤差を決定する方法に関する。その方法は、一般に、連続的に変化するオフセットマークの対称中心を決定する工程と、それをマークの幾何学的中心と比較する工程と、を備える。オーバレイがゼロである場合には、対称中心は、マークの幾何学的中心と一致する傾向がある。オーバレイがゼロでない場合(例えば、2つの層間にずれがある場合)には、対称中心は、マークの幾何学的中心からずれる。その位置ずれを、連続的に変化するマークの予め設定されたゲインと組み合わせて用いることで、オーバレイ誤差を算出する。
(もっと読む)
基板の上に配置された膜の特性を測定する方法およびシステム
本発明は、基板の上に配置された膜の特性を測定する方法およびシステムを提供することを対象とする。該方法は、膜の上において複数の処理領域を識別することと、複数の処理領域のサブセットの特性を測定することと、測定された特性を確定することと、測定された特性の1つの変化を決定することと、測定された特性の1つと、サブセットの残りの処理領域に関連付けられる測定された特性との比較に基づいて、変化の原因を関連付けることとを含む。該システムは、上述された方法を実施する。 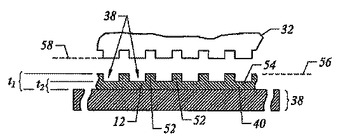 (もっと読む)
(もっと読む)
表面凹凸の測定・評価方法およびシステム、表面凹凸評価装置並びに表面凹凸の測定・評価方法のプログラム
【課題】 人間の感性に頼ることなく、定量的かつ再現性の良いローピングなどの程度の測定・評価評価が可能となる測定・評価方法等を提供する。
【解決手段】
所定の入射角で、メタルイハライド光源12が測定対象の表面に光を照射する工程と、入射角に略等しい反射角に対応させた角度上で表面から反射される光をCCDカメラ15が受光し、反射光を光の強度の分布のデータに変換する工程と、そのデータに基づいて、表面の光の強度変化を指標として演算装置17が算出する工程とを有するものである。
(もっと読む)
容器傾斜度の光学式検査
容器(34)の傾斜度を検査する装置は、容器の下に位置決めされていて、容器を定位置に保持しているとき及び容器を軸線(A)回りに回転させているときに光エネルギー(60)を容器底(62)に差し向ける光源(50)を有する。容器(34)の下方に位置決めされた光センサ(54)が、容器底(62)から反射した源(50)からの光エネルギーを部分的に受け取る。情報プロセッサ(56)が、反射光エネルギーと容器の回転の組合せ関数として軸線(A)に垂直な平面からの要素底(62)のずれを求めるために光センサ(54)に結合されている。容器(34)は好ましくは、定位置に保持され、駆動ローラ(24)によって軸線回りに回転し、この駆動ローラは、容器(34)を軸方向に間隔を置いたバックアップローラ(26,28)に押し付けて容器(34)の幾何学的形状及びバックアップローラ(26,28)の間隔の関数として平均回転軸線を定める。  (もっと読む)
(もっと読む)
差動限界寸法およびオーバーレイ測定装置および測定方法
【課題】 イン・ラインの測定および制御ツール、テスト・パターンおよび評価方法を含む統合された測定システムを提供する。
【解決手段】 基板上で寸法を測定するための方法を記載する。ターゲット・パターンは、主周期ピッチPで反復する公称特徴寸法を備え、主方向に直交する所定の変動を有する。基板上に形成されたターゲット・パターンは、少なくとも1つの非ゼロ次回折が検出されるように照射する。公称寸法に対する転写された特徴寸法の変動に対する非ゼロ次回折の応答を用いて、基板上で限界寸法またはオーバーレイ等の対象の寸法を求める。本発明の方法を実行するための装置は、照射源と、非ゼロ次回折を検出するための検出器と、ターゲットからの1つ以上の非ゼロ次回折を検出器において検出するようにターゲットに対して照射源を位置付けるための手段と、を含む。
(もっと読む)
テクスチャー表面上の角錐のサイズ測定
光起電性素子などの対象物(6)のテクスチャー表面(4)上の角錐(3)のサイズを測定する装置であって、該装置(1)は、対象物ホルダー(10)と、テクスチャー表面領域(21)から反射光を得るために通常動作中に該領域(21)上に平面波ビームを照射する光源(12)と、通常動作中に該反射光の強度を測定する検出器(13)と、検出器(13)の測定値をさらに処理するための手段(14)とを備える。
 (もっと読む)
(もっと読む)
パターンのムラ欠陥検査方法及び装置
被検査体の表面に形成されたパターンに発生する複数種類のムラ欠陥
を高精度に検出できること。
単位パターン53が規則的に配列されてなる繰り返しパターン51を表面に備えたフォトマスク50に光を照射する光源12と、上記フォトマスクからの散乱光を受光して受光データに変換する受光部13とを有し、この受光データを観察して上記繰り返しパターンに発生したムラ欠陥を検出するムラ欠陥検査装置10において、複数の波長帯の光から所望の波長帯の光を一または複数選択して抽出する波長フィルタ14を有し、この選択して抽出された波長帯の光を用いて上記繰り返しパターンのムラ欠陥を検出することを特徴とするものである。
(もっと読む)
表面検査装置および表面検査方法
本発明は、照明光を短波長化しなくても、確実に繰り返しピッチの微細化に対応できる表面検査装置および表面検査方法の提供を目的とする。そのため、被検基板20の表面に形成された繰り返しパターンを直線偏光L1により照明する手段13と、表面における直線偏光L1の振動面の方向と繰り返しパターンの繰り返し方向との成す角度を斜めに設定する手段11,12と、繰り返しパターンから正反射方向に発生した光L2のうち、直線偏光L1の振動面に垂直な偏光成分L4を抽出する手段38と、偏光成分L4の光強度に基づいて、繰り返しパターンの欠陥を検出する手段39,15とを備える。 (もっと読む)
線プロファイル非対称性測定
本発明の側面は、マイクロ電子フィーチャのアレイの対称性/非対称性を測定するための方法及び機構を提供する。本発明の一実施形態は、マイクロ電子デバイスにおける三次元構造の非対称性を測定する方法を提供する。本方法により、光は、マイクロ電子デバイスのマイクロ電子フィーチャのアレイに向けられる。光は、複数のマイクロ電子フィーチャの全長及び全幅を含むアレイの一部を照射する。アレイから散乱し戻された光は、一又はそれ以上の反射角、一又はそれ以上の波長、或いはそれらの組み合わせから成る群より選択された条件で検出される。本方法はまた、反射の余角からのデータを調べることを含む操作を実行することにより、戻り散乱光の一又はそれ以上の特性を調べることも含む。 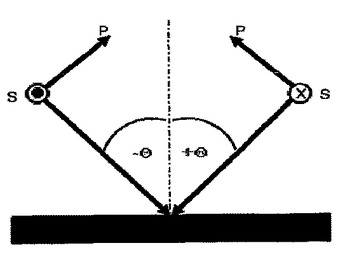 (もっと読む)
(もっと読む)
機械学習システムを用いた半導体ウェハ上に形成された構造の光学測定
半導体ウェハ上に形成された構造を、測定装置を用いて測定された第1の回折信号を取得することにより検査する。第2の回折信号は、機械学習システムを用いて生成される。機械学習システムは、第2の回折信号を生成するために、構造のプロファイルを特徴付ける1以上のパラメータを入力として受け取る。第1の回折信号と第2の回折信号は比較される。第1の回折信号と第2の回折信号が一致基準の範囲内で一致する場合、構造の形状は、第2の回折信号を生成するために機械学習システムで使用されたプロファイル又は1以上のパラメータに基づいて求められる。  (もっと読む)
(もっと読む)
パターン化ウェハまたは非パターン化ウェハおよびその他の検体の検査システム
パターン化と非パターン化ウェハの検査システムを提供する。1つのシステムは、検体を照明するように構成された照明システムを含む。システムは、検体から散乱された光を集光するように構成された集光器をも含む。加えて、システムは、光の異なる部分に関する方位と極角情報が保存されるように、光の異なる部分を個別に検出するように構成されたセグメント化された検出器を含む。検出器は、光の異なる部分を表す信号を生成するように構成されていてもよい。システムは、信号から検体上の欠陥を検出するように構成されたプロセッサを含むこともできる。他の実施形態におけるシステムは、検体を回転・並進させるように構成されたステージを含むことができる。1つの当該実施形態におけるシステムは、検体の回転および並進時に、広い走査パスで検体を走査するように構成された照明システムを含むこともできる。 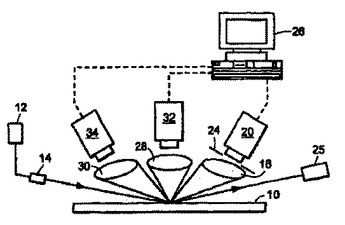 (もっと読む)
(もっと読む)
厚さ検出装置
【課題】光透過性を有する被検出対象物の厚さを反射光に基づいて検出する装置において、反射光の照射領域の中心位置が確実に検出できるように構成された厚さ検出装置を提供する。
【解決手段】光透過性を有する被検出対象物の厚さをその表面及び裏面からの反射光に基づいて検出するにあたり、表面反射光及び裏面反射光のCCDへの照射領域の中心位置を各反射光ごとに検出し、得られた中心位置に基づいて被検出対象物の厚さを検出するようになっている。そして、中心位置の検出においては、まずその検出対象となる反射光の照射領域において、受光レベルが基準レベルを超過する範囲(裏面側:S1〜S2、表面側:S3〜S4)を検出し、この超過する範囲における中点位置を算出する。そして、その算出された中点位置に基づいて、その反射光の照射領域の中心位置を検出することとなる。
(もっと読む)
透明膜の段差の測定方法及び位相シフトマスクの作成方法
【課題】透明膜の段差の測定方法に関し、非接触、非破壊で且つ簡単な操作で高速、高精度に位相シフターの段差を測定すること。
【解決手段】第1の透明膜1の一部に形成された複数の第1の溝Sa1 ,…,San の段差量t1 ,….tn と該第1の溝Sa1 ,…,San からの反射光の偏光状態を示すパラメータの値との相関関係f1 を求めてデータベース化した後に、第2の透明膜42の一部に形成された第2の溝45の反射光の偏光状態を示すパラメータの第1の値を計測して、該第1の値と前記データベースの前記相関関係に基づいて該第2の溝45の第1の段差量を求める工程を含む。
(もっと読む)
901 - 917 / 917
[ Back to top ]