
Fターム[2F065JJ19]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 1個 (2,498) | 撮像管 (1,280)
Fターム[2F065JJ19]に分類される特許
61 - 80 / 1,280
眼鏡用測定装置及び三次元測定装置
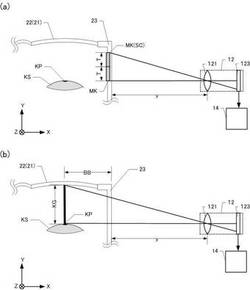
【課題】 被検者に負荷をかけることなく角膜眼鏡間距離等の測定を行う眼鏡用測定装置を提供する。
【解決手段】 眼鏡用測定装置(10)は、指標マーク(SC)が眼鏡フレーム(23)に取り付けられた眼鏡(20)をかけた被検者を撮影する撮影部(12)と、撮影部で撮影された被検者の眼球の頂点を求めるとともに、指標マーク(SC)に基づいて眼鏡の眼鏡レンズ(21)と被検者の眼球の頂点(KP)との角膜眼鏡間距離(KG)を演算する演算部(14)と、を備える。
(もっと読む)
力学挙動解析システム、及び力学挙動解析方法

【課題】被解析試料の巨視的な動きを伴った場合であっても材料や構造物などの被解析試料の微視的な領域の力学挙動を簡便に解析可能な新規な力学挙動解析システム、及び力学挙動解析方法を提供する。
【解決手段】力学挙動解析システムは、被解析試料の解析表面を少なくとも被覆し、変形自在であって、かつ、被解析試料側の少なくとも表層に所定の周期構造が形成されている表面ラベルグレーティング膜及び被解析試料からなるサンプル60と、スポット光であるプローブ光を入射する照射手段20と、表面ラベルグレーティング膜からの回折光を検出する受光手段30と、被解析試料と受光手段との距離を検出する距離検出手段70と、回折角のデータを保持する記憶手段14と、記憶手段14に保持された複数の前記回折角のデータから、回折格子の周期構造変化を算出し、当該周期構造変化から被解析試料の力学挙動を解析する解析手段13と、を具備する。
(もっと読む)
溶削済み鋼材の表面検査方法および表面検査装置
【課題】表面を溶削された鋼材の表面に残留する湯だれや未溶削部などの欠陥を精度良く確実に検出できる溶削済み鋼材の表面検査方法、およびこれに用いる検査装置を提供する。
【解決手段】1200℃以上に加熱され且つ表面f1〜f4,c1〜c4を溶削された鋼材Mの該表面を撮像する第1カメラ10、および、該カメラ10により得られた画像の輝度信号bsを温度に換算し、健常部位との温度差により湯だれ部mdや未溶削部umの疑似欠陥部分の有無を判別する信号処理部11を含む疑似欠陥検出部12と、上記撮像がされた同じ鋼材Mの表面f1〜f4,c1〜c4にレーザL1を照射するレーザ照射装置2、照射された該レーザL1が拡散反射された鋼材Mの表面f1〜f4,c1〜c4を撮像する第2カメラ7、および、該カメラ7により得られた画像を基に、鋼材Mの表面を連続した断面形状により3次元的に示す画像処理部8を含む3次元計測部9と、を備えている、溶削済み鋼材の表面検査装置1。
(もっと読む)
計測方法
【課題】内視鏡装置を用いて三次元形状の計測を短時間で行う計測方法を提供すること。
【解決手段】被検物の三次元形状を内視鏡装置を用いて計測する計測方法であって、所定の縞パターンを内視鏡装置の1箇所から被検物に投影し、被検物において縞パターンが投影された部分を撮像して1枚のパターン投影画像を取得し、空間的位相シフト法またはフーリエ変換法を用いて縞パターンが投影された部分の三次元形状を1枚のパターン投影画像から計測することを特徴とする。
(もっと読む)
三次元点群位置データ処理装置、三次元点群位置データ処理方法、三次元点群位置データ処理システムおよびプログラム
【課題】三次元点群位置データの処理の途中経過を知ることができる技術を提供する。
【解決手段】三次元レーザースキャナが測定した三次元点群位置データ(S502)に基づき、解像度を段階的に変えた三次元モデルを作成する(S505)。この際、低解像度の三次元モデルの作成およびその表示(S506)、さらにその後に、ラベリングされたデータを引き継いで(S509)の高解像度の三次元モデルの作成およびその表示を行う。ここで、低解像度の三次元モデルの表示を行うことで、最終的な三次元モデルの完成の途中の段階をユーザが把握することができる。
(もっと読む)
封止容器の検査方法及び検査装置
【課題】目視に頼っていた封止容器のリッドの位置ずれ検査を光切断方式を用いて自動化する方式と検査装置を提供する。
【解決手段】パッケージ36にリッド37を接合した封止容器の上面へスリット光を照射し、スリット光に対し封止容器を相対的に移動させて封止容器の複数箇所にスリット光を照射し、パッケージ36の厚みにより分離したスリット光の端点の位置情報を光切断方式を用いて測定し、測定した平面方向の位置情報と予め定めた基準値とを比較する事によりパッケージ36に対するリッド37の位置ずれと傾きを判断する。
(もっと読む)
位置検出方法、位置検出装置、ロボットシステム
【課題】画像処理を用いてパレタイズ位置が特定可能な位置検出方法を提供する。
【解決手段】位置検出方法は、使用対象のパレット70のX軸方向と、X軸に直交するY軸方向とに、ワーク60を整列配置するパレタイズ位置を示すパレタイズパターンを撮像する工程と、前記パレタイズパターンの撮像データを用いて、X軸方向の列の輝度差、およびY軸方向の列の輝度差を検出して輝度検出パターンを作製する工程と、輝度検出パターンを用いてパレット70の基準パレタイズパターンを特定する工程と、作業位置に載置されたパレット70のパレタイズパターンを撮像する工程と、基準パレタイズパターンを、作業位置に配置されたパレット70のパレタイズパターンと重なり合う位置に移動させて、作業基準位置Pに対する作業位置に載置されたパレット70のパレタイズ位置を特定する工程と、を含む。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】正確に3次元座標を検出できるようにする。
【解決手段】取得部が、魚眼レンズを介して撮影した画像である魚眼画像を取得し、変換部が、魚眼画像を変換して、変換画像を生成し、認識部が、変換画像から認識対象の画像を認識する。本発明は画像処理装置に適用することができる。
(もっと読む)
形状測定装置
【課題】測定範囲および測定精度を調整・変更可能なプローブを備えた形状測定装置を提供する。
【解決手段】ワークに直線状の光を照射する光照射部と、光照射部から照射された光のワークからの反射光を撮像する撮像部30と、を備えたプローブによりワークの表面を非接触に走査して、ワークの表面形状を測定する形状測定装置において、撮像部30は、ワークの画像を撮像する撮像素子31と、ワークからの反射光を撮像素子31の撮像面に結像させる結像レンズ32と、結像レンズ32を交換可能とするマウント部33と、を備える。
(もっと読む)
タイヤ表面形状測定装置及びタイヤ表面形状測定方法
【課題】サイドウォール面の厚みやトレッド面の幅が様々に異なるタイヤのそれぞれに対して、同一の画像分解能で且つ高い精度で表面形状を検出する。
【解決手段】タイヤ表面形状測定装置において、タイヤの表面に照射されたライン光を撮像する撮像面が設けられた撮像素子9と、撮像面に結像したライン光の像が全て含まれるように、撮像面上にライン光の像の長手方向長さを備えた有効撮像領域Aを設定する撮像領域設定手段と、設定された有効撮像領域Aから予め定められた所定数の測定信号を抽出する画素データ抽出手段と、を備える。
(もっと読む)
測定用工具を合わせるための工具ホルダ、測定装置、及びその測定装置の校正方法
【課題】改良した校正機構によって工具ホルダでより正確な校正を行うことができる測定装置につき、当該測定装置で測定される工具を合わせるための工具ホルダを提供する。更に、そのような測定装置と、その測定装置の校正に適した方法を提供する。
【解決手段】測定装置で測定される工具を合わせるための工具ホルダは、当該工具ホルダの垂直軸を規定する対称軸22を有する固定可能な本体20と、当該工具ホルダに取り付けられる工具用に規定された工具のゼロ点23と、前記工具の前記ゼロ点23から所定の水平距離及び所定の垂直距離を隔てた校正機構24と、を備え、前記校正機構24は、前記工具の前記ゼロ点23を含む垂直線の所定高さに半円状外縁部を備え、前記半円状外縁部の中心角が135°を上回るように構成されている。
(もっと読む)
原子力発電プラントの蒸気発生器検査装置、蒸気発生器検査方法及びプログラム
【課題】カメラで撮像された目視点検映像からBEC穴の隙間の閉塞率の検査を自動で行うことができる原子力発電プラントの蒸気発生器検査装置、蒸気発生器検査方法及びプログラムを提供する。
【解決手段】蒸気発生器内の管支持板のBEC穴の閉塞状況を検査する原子力発電プラントの蒸気発生器検査装置であって、管支持板のBEC穴の開口形状を撮像する撮像手段と、撮像したBEC穴の画像を記録し、画像から開口形状を示す目視点検画像を抽出して記憶する記憶部と、目視点検画像に対し、3次元形状モデルのデータから生成した基準画像、又は予め記憶部に記憶している基準画像の初期BEC穴の開口形状を重ね合わせる処理をした後、重ね合わせた初期BEC穴の開口形状と目視点検画像の開口形状とからBEC穴の閉塞率を算出する画像処理部と、を有する。
(もっと読む)
搬送量計測装置および記録装置
【課題】データ処理量を増大させることなく、パターンマッチングに適したパターンを正確にピックアップし、記録用紙上の移動量計測用パターンの正確な移動量を検出する。
【解決手段】記録媒体を所定の搬送方向に搬送する搬送手段を備え、搬送される記録媒体に記録ヘッドを用いて画像を記録する記録装置における記録媒体の搬送量を計測する搬送量計測装置であって、搬送される記録媒体に対して所定範囲の撮像領域を有し、記録媒体の搬送量を計測するための移動量計測用パターンの抽出および移動量計測用パターンの移動量を算出するための画像データを取得するイメージセンサ101−1と、搬送方向のイメージセンサ101−1の上流側に配置された所定範囲の撮像領域を有し、移動量計測用パターンを抽出する範囲を選択するためのイメージセンサ101−1よりも低解像度の画像データを取得するイメージセンサ101−2を有する。
(もっと読む)
画像処理方法
【課題】複数個束ねられた偏平状態の段ボール箱の接合間隔を検査するために、検査画像に含まれる接合間隔の位置を高い精度で特定することが可能な画像処理方法を提供する。
【解決手段】境界検出ステップS1で、撮影画像における段ボール箱積層体の側面部分と背景部分との境界位置を検出し、濃度補正ステップS2で、検出された境界位置によって特定される段ボール箱積層体の側面部分を対象として濃度補正処理を行う。投影ステップでは、濃度補正処理が行われた側面部分に対して、積層方向に直交する方向に投影処理を行うことで、積層方向に直交する方向の1次元濃度データを得る。組み合わせ検出ステップで、1次元濃度データに対して、濃度が低下する範囲である谷部分とこの谷部分に隣接する、濃度が上昇する範囲である山部分との組み合わせを検出すると、決定ステップS4で、検出された組み合わせの中心位置を求め、接合間隔列の中央位置として決定する。
(もっと読む)
形状測定装置
【課題】プローブにおける撮像素子の位置決め精度を向上させ、組み立て工程・調整工程の工数を低減することのできる形状測定装置を提供する。
【解決手段】光源と、光を直線状の光に変換する光学手段と、ワークからの反射光を撮像する撮像素子110と、ワークからの反射光を結像させる結像レンズ121とを備え、光源の光照射面と、結像レンズ121の主点を含む主平面と、撮像素子110の撮像面とが、シャインプルーフの条件を満たした形状測定装置であって、撮像素子110の撮像面が光源の光照射面に対して成す角度を調整する第1調整手段と、撮像素子110の撮像面が光源の光照射面に対して成す角度が一定の状態において、撮像素子110の撮像面上の測定位置を調整する第2調整手段と、結像レンズ121を光軸方向に移動させて、当該結像レンズ121の光軸方向の位置を調整する第3調整手段と、を備える。
(もっと読む)
3次元形状モデル高精度化方法およびプログラム
【課題】被写体を撮影した画像と背景のみを撮影した画像から、被写体3次元モデルを高精度に復元する方法を提供する。
【解決手段】各カメラの被写体シルエット画像から視体積交差法により復元されるVisual Hullの表面に存在するボクセルのオブジェクトらしさに関する尤度を算出し、オブジェクトらしさに関する尤度をもとにVisual Hullの整形を行い、Visual Hullの整形が収束するまで、算出と整形を繰り返し適用する。上記のVisual Hullから獲得される3次元形状モデルのテクスチャ状態を評価し、3次元形状モデルのテクスチャ状態をもとに3次元形状モデルの整形を行い、3次元形状モデルの整形が収束するまで、評価と整形を繰り返し適用する。
(もっと読む)
光学素子、光学素子を備えた顕微鏡装置ならびに光学素子の組み立て方法
【課題】液晶光学素子の光軸を対物レンズの光軸に位置合わせできる光学素子を提供する。
【解決手段】光学素子(103、10)は、対物レンズ(104)よりも光源(101)側に配置され、液晶分子が含まれる液晶層と、その液晶層を挟んで対向するように配置された二つの第1の透明電極とを有し、その液晶層を透過する光源から発した所定の波長を持つ直線偏光の位相または偏光面を、二つの第1の透明電極の間にその所定の波長に応じた電圧を印加することにより制御する液晶光学素子(3、12、13)と、液晶光学素子(3、12、13)の光軸を対物レンズ(104)の光軸と位置合わせ可能なように液晶光学素子(3、12、13)を対物レンズ(104)に対して相対的に移動可能な光軸調整機構(4、14)とを有する。
(もっと読む)
コンクリート表面の閉合ひび割れ検出方法
【課題】コンクリート表面を撮像した元画像データを画像処理して閉合ひび割れを自動的に抽出する。
【解決手段】上下左右の矩形の処理領域を一般的に想定される閉合ひび割れのサイズをカバーする面積だけオーバーラップするように分割した複数の矩形の処理領域の元画像に対して画像処理を行い、撮影解像度以上のサブピクセル精度でひび割れ線分を抽出し、領域解析により一定以下の面積の微粒子を除去し、近接する線分同士を連結して閉合領域を生成する。全ての領域に対してラベル付けを行い、各領域の上下左右の端部の座標値が前記矩形の処理領域の範囲内にあるか否かを判定し、範囲内ならば閉合ひび割れと決定する。
(もっと読む)
欠陥位置情報生成装置、欠陥確認システム及び欠陥位置情報生成方法
【課題】欠陥箇所に直接マーキングすることなく、検査官が長尺シート材における欠陥箇所をすみやかに特定することのできる欠陥位置情報生成装置等を提供する。
【解決手段】原点Mと、当該原点を識別するための記号との組合せが、長手方向に複数印字された長尺シート材Sを撮影した撮影画像において、原点M及び欠陥Dの位置を特定し、特定した原点Mのうち欠陥Dに1番目又は2番目に近い原点Mを基準として当該欠陥Dの位置を示す欠陥座標を算出する。基準となった原点Mと組合せをなす記号を示す記号情報と、算出した欠陥座標を示す欠陥座標情報とを含む欠陥位置情報を生成する。
(もっと読む)
計測対象の3次元表面形状算出方法及び3次元表面形状計測装置
【課題】
位相シフト方法による計測対象の3次元形状の計測では、少なくも3種類以上の位相を変えた縞パターンの投影が必要であり、縞パターンの切替、撮像の時間等の計測に時間が掛る課題がある。
【解決手段】
分離可能な異なる2色と各々位相の異なる4種類の縞パターンの2つから合成した異なる2種類の合成縞パターンを計測対象にカラー投影して撮影したカラー画像の色分離を行って撮像画像の縞パターンの位相を算出して計測対象の3次元表面形状の計測を行う。
(もっと読む)
61 - 80 / 1,280
[ Back to top ]