
Fターム[2F065LL57]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 音響光学的効果関連 (137)
Fターム[2F065LL57]に分類される特許
1 - 20 / 137
角度測定方法及び角度測定システム
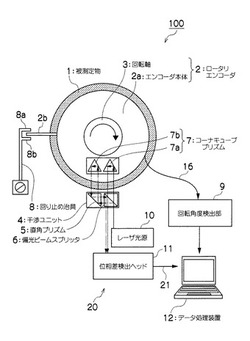
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】エンコーダ本体2aに対する回転軸3の相対的な回転角を検出するロータリエンコーダ2と、エンコーダ本体2a及び回転軸3から切り離され、エンコーダ本体2aの回転角を検出する非接触角度検出手段20(レーザ干渉式検出手段)とを備える。これにより、ロータリエンコーダ2が検出した回転角を、非接触角度検出手段20で検出した回転角に基づいて補正することができ、回転角を高精度且つ短時間で測定することが可能となる。
(もっと読む)
観察装置

【課題】高速に移動する対象物の像を得ることができる観察装置を提供することを目的とする。
【解決手段】観察装置1は、光源部10、周波数変調部20、検出部40、及び演算部50を備える。周波数変調部は、第1の光又は第2の光を入力して、当該入力した光を、第1方向において互いに異なる複数の特定周波数Ωnだけ遷移された周波数を有し、第2方向において同一の周波数を有する光に変調する。検出部40は、対象物2で生じた散乱光のうち、検出部40に到達した光を検出し、ドップラーシフト量に応じた周波数で時間的に変化する散乱光のデータを、各時刻に出力する。演算部50は、検出部40からの出力に対して、特定周波数Ωnに基づいて複数の周波数領域に分割する処理と、時刻変数に関する1次元フーリエ変換と、周波数に関する1次元フーリエ変換とを行って得られたデータを対象物2の像として得る。
(もっと読む)
計測装置
【課題】簡易な構成で広い計測レンジと高い計測精度とを実現した計測装置を提供する。
【解決手段】計測装置は、第1光源、第2光源、第1検出器、第2検出器及び算出部を備える。第1光源は第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する。第2光源は第3波長の第2光を生成する。第1検出器は第1光を参照面及び被検面に各々照射することで生成された第1干渉縞を検出する。第2検出器は第2光を参照面及び被検面に各々照射することで生成された第2干渉縞を検出する。第3波長は第1波長及び第2波長の合成波長より短い。算出部は第1時刻において第2干渉縞の位相のデータから第2干渉縞の次数が算出できなくなった場合に、第1時刻より後の走査区間における第1干渉縞の位相の変化に基づいて第1時刻以降における第2干渉縞の次数を算出し、該算出された第2干渉縞の次数を用いて第1時刻以降における被検面の形状を算出する。
(もっと読む)
計測装置
【課題】高速かつ高精度に被検面の形状を計測することが可能な計測装置を提供すること
【解決手段】計測装置は、光コム光源101から射出された光束を、被検光束と参照光束に分割するPBS15と、前記参照光束と前記被検光束の光路長差を変化させる遅延素子9と、前記被検光束と前記参照光束が干渉して形成する干渉縞を撮像する撮像素子24と、遅延素子が光路長差を変化させて撮像された干渉縞の信号に基づいて被検面23の位置を算出する解析器25と、を有する。
(もっと読む)
変位検出装置
【課題】光源からの光を回折格子が設けられた領域で反射させて、被測定面の変位を検出する変位検出装置を提供する。
【解決手段】変位検出装置1は、光源2と、対物レンズ3と、分離光学系4と、コリメータレンズ7と、非点収差発生部8と、受光部9と、位置情報生成部10と、絞り部材11とを備えている。そして、対物レンズ3から出射され、被測定面に向けて集光される光の光軸に対する角度をθ、光源2の波長をλ、被測定面101に形成された回折格子のピッチをd、回折格子による回折光の次数をnとした場合に、遮蔽部11は、
を満たす反射光を遮蔽する。
(もっと読む)
Hilbert位相画像処理のためのシステムと方法
【課題】細胞内で起こる高速現象を測定する装置を提供する。
【解決手段】ヒルベルト位相顕微鏡を使用し、透光性物体に関連した高解像度位相情報から、一フレーム毎の形状、体積のようなパラメータを得、ミリ秒の時間スケールで取得した多数の画像をもとに、ダイナミックな変動をナノメートルオーダーの分解能で定量化する。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 シリンドリカルレンズ59が、ガラス管Gに出射されるレーザ光をY軸線方向に集光させて、ガラス管GにX軸線方向に延びたライン状のレーザ光を照射する。Y軸方向サーボ回路119は、4分割フォトディテクタ62及びY軸方向エラー信号生成回路118によって検出されたY軸方向エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に照射されるようにガルバノミラー56を回転駆動するモータ57をサーボ制御する。また、Y軸周り角度サーボ回路122は、4分割フォトディテクタ62及びY軸周り角度エラー信号生成回路121によって検出されたY軸周り角度エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に垂直に照射されるようにガルバノミラー54を回転駆動するモータ55をサーボ制御する。
(もっと読む)
透光性板状物体の厚さ測定装置
【課題】 透光性板状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガラス板Gの表面及び裏面で反射させて、反射光をラインセンサ55に導いてガラス板Gの厚さを測定する。測定用レーザ光は、Y軸線回りに回転可能なガルバノミラー45及びX軸線周りに回転可能なガルバノミラー51を介してガラス板Gに照射される。サーボ用レーザ光も、ガルバノミラー45,51を介してガラス板Gに照射され、反射光はガルバノミラー45,51を介して4分割フォトディテクタ66に導かれる。4分割フォトディテクタ66により、ガラス板Gの表面のX軸及びY軸線回りの傾きが検出され、この傾きに応じてガルバノミラー45,51を駆動するサーボ制御により、測定用レーザ光をガラス板Gに対して常に一定方向から入射させる。
(もっと読む)
検査装置及び検査方法
【課題】デバイスが形成されている半導体基板の全面について厚さムラを短時間で検査することができる検査装置を実現する。
【解決手段】本発明による検査装置は、半導体基板(7)のデバイス形成面とは反対側の裏面(7a)に向けて、前記半導体基板に対して半透明な照明光を照射する照明手段(1,2,3)と、半導体基板の裏面に入射し、デバイス構造面(7b)で反射し、前記裏面側から出射した照明光を受光する撮像手段(15)と、 撮像手段からの出力信号を用いて厚さムラを検出する信号処理装置(20)とを具える。信号処理装置は、前記撮像手段からの出力信号を用いて、半導体基板に形成されているデバイスの半導体基板の裏面側から撮像した2次元画像を形成する手段(21)と、撮像されたデバイスの2次元画像と基準画像とを比較し、画像比較の結果に基づいて前記半導体基板の厚さムラを検出する厚さムラ検出手段(22,23,24)とを有する。
(もっと読む)
測定装置
【課題】測定対象物の位置を高精度に測定する測定装置を低コストで提供する。
【解決手段】変調部によって第1周波数で変調された基準光からデジタル基準信号を取得し、前記第1周波数で変調された光が照射された測定対象物から反射された測定光からデジタル測定信号を取得し、前記デジタル基準信号と前記デジタル測定信号とを処理して前記測定対象物の位置を測定する装置は、前記デジタル測定信号に前記デジタル基準信号と同期したサイン信号又はコサイン信号を乗算して、第2周波数および高調波の成分を有する信号をそれぞれ出力する第1および第2同期検波部と、前記第1又は第2同期検波部から出力された信号をデシメーション周波数でフィルタリングして前記高調波の成分を減衰させる第1および第2デシメーションフィルタと、前記第1および第2デシメーションフィルタから出力された信号に基づいて前記測定対象物の位置を演算する演算部とを備える。
(もっと読む)
干渉計測方法および干渉計測装置
【課題】 干渉計測の応答速度を損なう事無く高精度な屈折率補正を実現可能な干渉計測方法を提供する。
【解決手段】 参照面で反射された光束と被検面で反射された光束との干渉信号を検出することによって被検光路の幾何学的距離を計測する干渉計測方法において、互いに波長が異なる複数の光束を用いて被検光路の光路長を算出する多波長光路長算出工程、多波長光路長算出工程で算出された被検光路の光路長から被検光路の空気の屈折率を算出する屈折率算出工程、屈折率算出工程で算出された屈折率を平滑化することによって平滑化屈折率を算出する平滑化屈折率算出工程、平滑化屈折率算出工程で算出された平滑化屈折率から被検光路の幾何学的距離を算出する幾何学的距離算出工程を有する事を特徴とする。
(もっと読む)
変位計測方法とその装置
【課題】
光干渉を用いた変位計測装置において、プローブ光路と参照光路とが空間的に分離して
いるため、空気の揺らぎ等による温度分布や屈折率分布、あるいは機械振動が生じた場合
、両光路間で光路差が変動し、測定誤差となってしまう。
【解決手段】
プローブ光の光軸と参照光の光軸を外乱の影響を受けない距離まで近接させて、プロー
ブ光を対象物に、参照光を参照面に各々照射し、その反射光同士を干渉させ、生じた干渉
光から対象物の変位量を求める
(もっと読む)
光センサー
【課題】光センサーの光学系において光源光の使用波長が変動しても、1/4波長板が確実に直線偏光を円偏光に変換して、良好なセンサー感度を確保維持する。
【解決手段】振動検出用光センサー1は光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5及び1個の受光素子6を備える。波長板ユニットは、構造性複屈折を利用した1/4波長板7と、反射面を有する振動板8との一体構造である。受光素子はその光軸x2を反射光の光軸x1と平行かつ僅かにずらして配置され、入射するビームスポット形状がその中心cを受光面6aの中心Oから僅かにずらした位置に投影されるので、検出される光量が振動板の変位に対応して増減する。
(もっと読む)
欠陥検査装置および欠陥検査方法
【課題】
従来技術によれば、試料に熱ダメージを与えることなく、短時間で高精度に欠陥検出・寸法算出することが困難であった。
【解決手段】
試料の表面におけるある一方向について照明強度分布が実質的に均一な照明光を、前記試料の表面に照射し、前記試料の表面からの散乱光のうち互いに異なる複数の方向に出射する複数の散乱光成分を検出して対応する複数の散乱光検出信号を得、前記複数の散乱光検出信号のうち少なくとも一つを処理して欠陥の存在を判定し、前記処理により欠陥と判定された箇所各々について対応する複数の散乱光検出信号のうち少なくとも一つを処理して欠陥の寸法を判定し、前記欠陥と判定された箇所各々について前記試料表面上における位置及び欠陥寸法を表示する欠陥検査方法を提案する。
(もっと読む)
散乱計測を用いてオーバレイ誤差を検出する装置および方法
【課題】複数レイヤ試料の2つのレイヤ間のオーバレイ誤差を決定する方法を提供する。
【解決手段】試料の第1レイヤから形成される第1構造および第2レイヤから形成される第2構造をそれぞれ有する複数の周期的ターゲットについて、光学システムを用い、周期的ターゲットのそれぞれについて光学信号が計測される。第1および第2構造の間には既定義されたオフセットが存在する。散乱計測オーバレイ技術を用いて既定義されたオフセットに基づいて周期的ターゲットからの前記計測された光学信号を分析することによって第1および第2構造間のオーバレイ誤差が決定される。本光学システムは、反射計、偏光計、画像化、干渉計、および/または走査角システムのうちの任意の1つ以上を備える。
(もっと読む)
計測装置
【課題】簡素な構造で立体形状を高精度に計測可能な計測装置を提供する。
【解決手段】計測装置100は、複数の波長成分を有する光を計測物50に照射する光源1と、軸上色収差を有する回折レンズ2と、干渉画像生成部3と、分光画像生成部21と、立体形状算出部22とを備える。干渉画像生成部3は回折レンズ2からの光を、可変の光路長差を有する光束L1,L2に分割するとともに、その光束L1,L2を重ねることで干渉画像を生成する。分光画像生成部21は、干渉画像が有する干渉光の強度の情報をフーリエ変換することによって、計測物50からの光の分光スペクトルの情報を有する分光画像を生成する。波数ごとに分光画像は生成される。この分光画像に基づいて合焦点位置が算出されるとともに、その合焦点位置から計測物50の立体形状が算出される。
(もっと読む)
変位検出装置
【課題】被測定面の面粗度、汚れ、微細なゴミ等の付着によって被測定面の変位量の測定に誤差が生じる可能性を減少させる変位検出装置を提供する。
【解決手段】変位検出装置1では、対物レンズ3が光源2からの出射光を被測定面101に向けて集光する。被測定面101からの反射光の光路は、分離光学系4により光源2から出射光の光路と分離される。分離光学系4を通った反射光は、集光手段7により集光され、非点収差発生手段8により非点収差が発生した状態で受光部9に入射する。位置情報生成部10は、受光部9で検出した光量から得られるフォーカスエラー信号を用いて被測定面101の位置情報を生成する。そして、集光手段7、非点収差発生手段8又は受光部9は、対物レンズ3により集光された出射光の焦点が被測定面101の奥側に位置するときに、フォーカスエラー信号の値が0になるように光軸上の位置が設定されている。
(もっと読む)
実時間測定分岐型干渉計
【課題】参照光および被検光を偏光の回転方向が互いに逆向きとなる2つの円偏光に変換するための光学素子を通過する際の波面の乱れを抑制し、実時間での光干渉測定をより高精度に行うことが可能な実時間測定分岐干渉計を得る。
【解決手段】光源部1からの光ビームを2光束に分岐し、第1光束を第2光束に対して所定の光学距離だけ迂回させた後に1光束に再合波して出射する迂回路部2を設ける。この迂回路部2における第1光束の光路上に第1のλ/2板15を配置し、第2光束の光路上に、第1のλ/2板15とは光学軸の方向が45度だけ異なる第2のλ/2板19を設置する。さらに、迂回路部2とビーム径拡大部3との間の光路上にλ/4板21を配置することにより、第1光束および第2光束を偏光の回転方向が互いに逆向きとなる2つの円偏光に変換する。
(もっと読む)
表面形状の測定方法及び測定装置
【課題】位相変調された干渉信号を検出し、干渉信号の位相を求める信号処理演算を行うことによってナノメータオーダでの分解能で表面形状測定を行うことのできる、表面形状の測定方法及び測定装置を提供する。
【解決手段】半導体レーザ光源11からのレーザ光を偏光方向が互いに直交し位相が異なる2つの光の合成光に変換してから回転多面体ミラー32に導き、レンズ33を通過した合成光を構成する2つの光を偏光ビームスプリッタ34により分離してその一方の光を参照面ミラー42、他方の光を被測定物体41の表面に照射する。参照面ミラー42からの反射光と被測定物体41の表面からの反射光を偏光ビームスプリッタ34により再び重ね合わせ、偏光板52を通過させることにより参照面ミラー42からの反射光と被測定物体41の表面からの反射光を干渉させる。
(もっと読む)
表面形状測定装置
【課題】可干渉距離を超える奥行きを持つ被測定体の表面形状を迅速に測定できる装置を提供する。
【解決手段】フォトカプラ13との間の光路長に差を設けられて配置される参照ミラー251、252、253、254、25Nを有する参照光生成部20を備える。参照ミラー251、252、253、254、…25Nは、この順に可干渉距離ΔZの光路長差を設けて配置されている。走査軸24を中心に走査ミラー23を揺動させることで、走査ミラー23による反射光を参照ミラー251、252、253、254、…25Nに順に照射することができる。
(もっと読む)
1 - 20 / 137
[ Back to top ]