
Fターム[2F065QQ13]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の微分、差分 (1,068)
Fターム[2F065QQ13]に分類される特許
81 - 100 / 1,068
走路推定装置及びプログラム
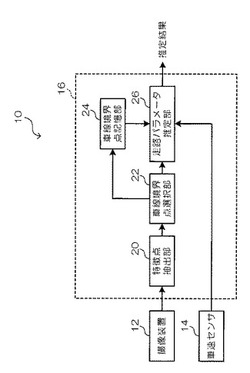
【課題】片側車線しか検出されない場合でも、俯角を固定することなく、走路に対する撮像装置の姿勢角を含むソロパラメータを推定する。
【解決手段】特徴点抽出部20により撮像装置12で撮像された撮像画像を取得して、撮像画像から特徴点を抽出し、車線境界点選択部22により、抽出された特徴点から車線を示す車線境界点を選択し、車線境界点記憶部24に一旦記憶する。走路パラメータ推定部26により、二時刻間でヨー角及び曲率が変化しないとの仮定の下で、二時刻間の横位置の変化を速度V及びヨー角を用いて表すことで、二時刻間の走路パラメータを関係付け、二時刻の各々で選択された車線境界点群と、走路パラメータにより定まる車線境界線との最適化により、走路パラメータを推定する。
(もっと読む)
波長走査干渉計

【課題】移動する被検体までの絶対距離を高精度に計測するために有利な波長走査干渉計を提供する。
【解決手段】波長走査干渉計は、光源から射出される光束の波長を変更しながら該光束から分割された参照光と被検光との干渉光の信号に基づいて被検体までの絶対距離を計測する。波長走査干渉計は、前記光源から射出される光束の波長が互いに等しい時刻である第1時刻およびその後の第2時刻と、前記第1時刻、前記第2時刻のそれぞれにおける前記干渉光の信号の周波数である第1周波数、第2周波数とに基づいて、前記被検体の移動による誤差成分が低減された絶対距離を算出する処理部を備える。
(もっと読む)
マスク検査方法およびその装置
【課題】検査時間および労力を低減できるマスク検査方法およびその装置を提供する。
【解決手段】実施形態によれば、マスク検査方法は、半導体露光用マスクに任意波長の光を入射させ撮像部にて像を取得する光学系を用いて、前記マスクの欠陥の有無を検査する方法であって、予め前記光学系による点像を、前記撮像部の読み出し方向に伸長される制御条件を取得する第1ステップ(S203)と、前記制御条件により、マスクの所望の領域の像を取得する第2ステップ(S205)と、取得した前記所望の領域の像において、信号強度が予め定めておいた第1閾値以上であり、前記信号強度の前記読み出し方向における差分が予め定めておいた第2閾値以下であるピーク信号が存在する場合、前記ピーク信号の座標を欠陥として判定する第3ステップ(S206)とを具備する。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】等速自在継手用ブーツ等の成形部品の欠陥を安定して効率的にしかも安価に検出することができる欠陥検出方法及び欠陥検出装置を提供する。
【解決手段】軸方向両端部に開口部を有し、かつこの開口部に外径側に突出する突起部2を設けた弾性材料からなる筒状の成形部品30における欠陥を検査する。軸心廻りに回転している成形部品に対してその突起部2の突起量を検出する。その後、その検出した測定データから成形部品30の回転振れ及び変形に基づく変位を修正した修正データを算出する。次に、設定された欠陥判断基準となる閾値と修正データとの比較と、設定された区間内での修正データの傾きの正常値との比較とを行う。これらの比較に基づいて成形部品の欠陥を検査する。
(もっと読む)
欠陥検査方法及び欠陥検査装置
【課題】欠陥検査装置のレシピで設定するセル領域の設定を自動化する方法を提供する。
【解決手段】CellMatAreaの区別をCellMatAreaと非CellMatAreaのGrayLevelの分布特徴の差を用いてイメージをスキャンして、その結果からCellMatAreaと非CellMatAreaを分ける方法を取った。具体的にはCellMatの始点と終点を区別するための基準になる閾値をMemoryCellだけあるAreaで計算した後、その閾値を適用して始点と終点を探してそのそれぞれを繋げてCellAreaを作成した。
(もっと読む)
光学式位置検出装置
【課題】少ない部品で対象物体の位置を高い分解能で検出することのでき、さらには、少ない部品で対象物体の三次元座標を高い分解能で検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10では、導光部材40、第1検出用光源121および第2検出用光源122を備えた線状光源ユニット13が複数並列配置されており、点灯した線状光源ユニット13が切り換わった際の光検出部30での受光結果によりY軸方向(第2方向)における対象物体Obの位置を検出する。また、第1検出用光源121と第2検出用光源122とが順次点灯した際の光強度分布を利用してX軸方向における対象物体Obの位置を検出する。さらに、第1検出用光源121および第2検出用光源122が同時点灯した際の光強度分布を利用してZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
自己発光型ターゲット及び変位計測システム
【課題】 屋外において昼夜に亘って連続的に変位計測が可能で計測誤差が少ない変位計測用の自己発光型ターゲット、及びそれを備えた変位計測システムを提供すること。
【解決手段】 撮像手段(カメラ3)で撮像した画像を解析手段(PC4)で解析することにより計測対象物(レール)の変位計測を行う変位計測システム1に用いられ、計測対象物(レール)に取り付けられて自ら発光する変位計測用の自己発光型ターゲット(計測用ターゲット2)を、ケース20と、このケース20の背面側内部に取り付けられて発光する発光手段21と、ケース20の前面側内部に取り付けられ、蓄光性蛍光体と光透過性物質とを含有して板状に成型された蓄光面材22と、を備えた内照式の自己発光型ターゲットとする。
(もっと読む)
光学式位置検出装置
【課題】検出用発光素子と受光素子との位置関係を適正化することにより、対象物体の位置を広い領域にわたって検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、X軸方向で離間する第1発光受光部15Aと第2発光受光部15Bとを順次排他的に駆動した際の駆動結果と、Y軸方向で離間する第3発光受光部15Cと第4発光受光部15Dとを順次駆動した際の駆動結果とに基づいて、対象物体ObのX座標およびY座標を検出する。複数の発光受光部15のいずれにおいても、検出用発光素子12と受光素子30とが隣り合う位置に配置され、対象物体Obで反射して第1受光素子30Aに到達する光は、対象物体Obにおいて第1検出用発光素子12Aおよび第1受光素子30Aが位置する側に向けて反射した光である。このため、第1受光素子30Aの受光強度は、対象物体Obの位置によって単調に変化する。
(もっと読む)
形状計測装置及び形状計測方法
【課題】グイ位相に伴って生じる計測誤差を低減する。
【解決手段】計測装置100は、光源から射出された光を参照光と被検光とに分割する分割部110と、前記参照光を反射する参照面111と、前記被検光を被検面113に集光する集光部112と、前記被検面でキャッツアイ反射された被検光と前記参照面で反射された参照光との干渉光を検出する第1検出器114とを含む計測ヘッド101と、前記計測ヘッドを前記被検面に沿って駆動する駆動部140と、前記計測ヘッドの位置を検出する第2検出器150と、前記被検光の前記被検面における回折によって生じるグイ位相を取得し、前記第1検出器により検出された干渉光の情報から前記被検光と前記参照光との間の位相差を算出し、前記第2検出器により検出された前記計測ヘッドの位置と前記取得されたグイ位相と前記算出された位相差とから前記被検面の形状を算出する処理部115と、を備える。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
【課題】物体の位置を高速に且つ高精度に検出する。
【解決手段】位置検出装置30は、微細な軸穴とこの軸穴を含むマーカーとを設けたオブジェクトを含む画像データを取得する画像データ取得部31と、マーカーをゴール位置に対応付けたマーカーゴール画像データを記憶するマーカーゴール画像記憶部32と、軸穴の軸中心をゴール位置に対応付けたターゲットゴール画像データを記憶するターゲットゴール画像記憶部36と、マーカーゴール画像データを用いて、画像データ取得部31が取得した画像データからマーカーを検出するマーカー検出部33と、ターゲットゴール画像データを用いて、画像データ取得部31が取得した画像データにおける、マーカー検出部33が検出したマーカー内から軸穴を検出するターゲット検出部37とを備えた。
(もっと読む)
検査装置及び検査方法
【課題】デバイスが形成されている半導体基板の全面について厚さムラを短時間で検査することができる検査装置を実現する。
【解決手段】本発明による検査装置は、半導体基板(7)のデバイス形成面とは反対側の裏面(7a)に向けて、前記半導体基板に対して半透明な照明光を照射する照明手段(1,2,3)と、半導体基板の裏面に入射し、デバイス構造面(7b)で反射し、前記裏面側から出射した照明光を受光する撮像手段(15)と、 撮像手段からの出力信号を用いて厚さムラを検出する信号処理装置(20)とを具える。信号処理装置は、前記撮像手段からの出力信号を用いて、半導体基板に形成されているデバイスの半導体基板の裏面側から撮像した2次元画像を形成する手段(21)と、撮像されたデバイスの2次元画像と基準画像とを比較し、画像比較の結果に基づいて前記半導体基板の厚さムラを検出する厚さムラ検出手段(22,23,24)とを有する。
(もっと読む)
変位測定装置、変位測定方法、光学用部材成形用金型の製造方法及び光学用部材
【課題】レーザ光の光量安定性、光量分布、光軸ぶれによる測定誤差を低減することのできる変位測定装置及び変位測定方法を提供する。
【解決手段】ビームスプリッタ3により、レーザ光源1から出射されたレーザ光を被測定物4に向かう第1分割レーザ光2a及び第2分割レーザ光2bに分割すると共に、第2受光素子6bにより第2分割レーザ光2bを受光する。そして、第2受光素子6bを、第2受光素子6bに入射する第2分割レーザ光2bの光量の割合と第1受光素子6aに入射する第1分割レーザ光2aの光量の割合とが一致する位置に配置し、位置演算器8は、第1受光素子6aの出力及び第2受光素子6bの出力の差に基づいてレーザ光源1に対する被測定物4の変位を演算する。
(もっと読む)
光学式検出装置、電子機器及び投射型表示装置
【課題】広い検出エリアにおいて検出精度の均一化ができる光学式検出装置、電子機器及び投射型表示装置等を提供すること。
【解決手段】光学式検出装置は、照射光LTを出射する照射部EUと、検出エリアRDETに存在する対象物OBにより照射光LTが反射することによる反射光LRを受光する受光部RUと、受光部RUの受光結果に基づいて、対象物OBの位置検出情報を検出する検出部110とを含む。照射部EUは、検出エリアRDETが設定される対象面SOBに対して斜め方向となる第1の面SF1と、対象面SOBに対して斜め方向となり、且つ、第1の面SF1よりも対象面SOBとの成す角が大きい第2の面SF2とにより規定される照射範囲に、第1の面SF1に沿う方向において第1の強度であり、第2の面SF2に沿う方向において第1の強度よりも強度が低い第2の強度である照射光LTを出射する。
(もっと読む)
荷電粒子ビーム描画装置
【課題】試料の表面形状を正確に測定して高い精度で描画することのできる荷電粒子ビーム描画装置を提供する。
【解決手段】高さ測定部40において、光源41から照射される光Liをマスク2上で投光レンズ42によって収束させた後、マスク2上で反射した光Lrを受光レンズ43を介して受光素子44に入射させる。受光素子44で光の位置が検出されると、信号処理部60を経て、高さデータ処理部70で高さデータHrが作成される。光Lrの光量が閾値以上であれば、高さデータHrを偏向制御部30へ送る。一方、光Lrの光量が閾値より小さい場合には、描画前に取得した高さデータマップHmから、対応する座標の高さデータを偏向制御部30へ送る。偏向制御部30は、高さデータ処理部70から送られた高さデータに基づいて、電子ビーム光学系10の調整を行う。
(もっと読む)
欠陥検出装置及び欠陥検出方法
【課題】管状体の内表面に発生しうる凹凸疵及び模様系の疵を同時に検出すること。
【解決手段】本発明に係る欠陥検出装置は、管状体の軸方向に沿って移動しながら管状体の内表面に対して環状のレーザ光を照射して環状ビーム画像を複数生成する管状体撮像装置と、生成された環状ビーム画像に対して画像処理を行い、管状体の内表面に欠陥が存在するかを判断する演算処理装置とを備え、演算処理装置は、各環状ビーム画像における環状のレーザ光の照射部分の重心位置を算出する環状ビームセンター算出部と、環状ビーム画像の座標系を変換して光切断画像を複数生成する座標変換部と、各光切断画像から生成された縞画像フレームに基づき管状体の内表面の凹凸状態を表す深さ画像及び管状体の内表面でのレーザ光の輝度分布を表す輝度画像を算出する画像算出部と、算出された深さ画像及び輝度画像に基づき内表面に存在する欠陥を検出する欠陥検出部とを有する。
(もっと読む)
溶接ビード切削幅測定方法
【課題】溶接ビード切削幅測定の信頼性を向上させる照明方法および画像処理方法を提供する。
【解決手段】照明光をエリア光とし、該エリア光を測定領域がビード長手方向13で相異なる二以上の輝度部(例えばA部、B部、C部の全三部)に分かれるように照射し、画像処理では、ビード長手方向での輝度変化が最大値のビード幅方向分布から、溶接ビード切削幅を求める。
(もっと読む)
跳躍動作測定装置及び跳躍動作測定方法
【課題】被験者の跳躍動作をより好適に測定することができる跳躍動作測定装置を提供する。
【解決手段】カメラ20によって撮像された画像データに基づいて、測定部13が、カウンタームーブメントジャンプ動作、スクワットジャンプ動作、ホッピングジャンプ動作、及び立ち上がり動作の中から測定動作選択部12によって選択された測定対象の跳躍動作の測定を行い、情報出力部15が、測定結果に基づいた情報を出力する。また、情報提供部14が、選択された跳躍動作となるように、被験者Aに対して、カメラ20によって撮像された画像データに基づいた情報提供を、モニタ30を通じて行う。
(もっと読む)
基板処理装置および基板処理の終了時点を検出する方法
【課題】基板表面に薄膜を形成する基板処理で、処理の進行具合をリアルタイムで把握して処理の終了時点を精度よく検出できる方法を提供すること。
【解決手段】基板1上に絶縁膜2を形成する基板処理装置10であって、絶縁膜2を波長可変単色光sで照射し、絶縁膜2および基板1からの各反射光を干渉させる干渉光発生手段12と、所望膜厚での干渉光強度Iが極小になるように単色光sの基準波長λ0を設定する基準波長設定部28と、基準波長を挟む2波長(λ1、λ2)間で単色光sを波長変調する変調部26と、これに応じた干渉光強度Iを検出する干渉光検出器18と、絶縁膜2が所望膜厚に達する直前から所望膜厚に達するまでの干渉光強度Iの変化に基づいて、最大波長(λ2)時と最小波長(λ1)時の干渉光強度の差分ΔIが零または所定値になる時点を基板処理の終了時点として検出する終了時点検出手段20とを備える。
(もっと読む)
中心ずれ測定装置及びその方法
【課題】中央部に円孔を有する円盤状基板の内周と外周の中心ずれを測定する時間を短縮可能な、中心ずれ測定装置及びその方法を提供すること。
【解決手段】中央部に円孔を有する円盤状基板Wの内周と外周の中心ずれを測定する中心ずれ測定装置であって、内周端面C1と外周端面C2に挟まれた主平面Sの半径方向幅Bを、投光部と受光部との間に形成された計測領域DA内で円盤状基板の全周にわたって非接触で計測する計測部と、前記計測部によって計測された半径方向幅Bの最大値Bmaxと最小値Bminの差Aを演算して該差Aを用いて中心ずれを演算する演算部とを備えることを特徴とする、中心ずれ測定装置。
(もっと読む)
位置検出システム、表示システム及び情報処理システム
【課題】 撮像装置のレンズ及び撮像素子を対象面と平行な方向に沿う方向に配置するこ
とで、撮像画像における歪みを抑止し、位置検出の精度を向上させる位置検出システム、
表示システム及び情報処理システムを提供すること。
【解決手段】 位置検出システム400は、撮像画像を撮像する撮像部500と、撮像部
500からの撮像画像に基づいて、対象面20に設定された検出エリアでの対象物OBの
座標情報を求める座標演算部430と、を含み、撮像部500は、レンズ部LEを有する
光学系と、撮像素子IMとを含み、撮像部500から対象面20の中央部へと向かう方向
である第1の方向と、対象面20のなす角度α1とし、レンズ部LEの光軸方向である第
2の方向と対象面20のなす角度をα2とした場合に、角度α1及び角度α2は、α1<
α2を満たす。
(もっと読む)
81 - 100 / 1,068
[ Back to top ]