
Fターム[2F065QQ13]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の微分、差分 (1,068)
Fターム[2F065QQ13]に分類される特許
41 - 60 / 1,068
対象物検出装置
【課題】対象物検出装置は、画像に所定の対象物が含まれていることを検出するために、一定の処理量が必要となるパターン認識処理を行う。このパターン認識処理に必要となる処理量は、従来の対象物検出装置において比較的大規模なものとなっている。よって、このパターン認識処理における処理量を削減したいという要望がある。
【解決手段】撮像装置群が撮影する2枚1組のステレオ画像に写っている被写体における視差を利用して、画像を構成する画素毎に、被写体までの距離を算出する。そして、画像に写っている被写体のうち、背景よりも手前に写っている被写体の部分の画素群を抽出する。さらに、これら抽出した被写体の部分の画素群に対して、統計的学習に基づくパターン認識処理を行い、これら抽出した被写体の部分の画素群の中に、予め定められた所定の対象物が被写体として含まれていることを検出する。
(もっと読む)
断面積測定装置、プログラム

【課題】測定対象物の断面積を精度良く測定する。
【解決手段】変位測定装置では、測定対象物が載置されている断面形状出力範囲の複数の測定点における変位を測定し、測定された変位から測定対象物の形状データを算出する際に、複数の測定点に対応する複数の変位情報を大きさで順番付けした場合に、最も大きい側から予め定められた第1割合に含まれる変位と、最も小さい側から予め定められた第2割合に含まれる変位と、を除いた中間変位情報を選出し、この中間変位情報を圧縮係数を用いて圧縮処理した圧縮変位情報を加算して測定対象物の断面積を測定する。
(もっと読む)
位置姿勢出力装置、位置姿勢出力プログラム及び位置姿勢出力方法
【課題】移動体の正確な位置および姿勢を時間遅れなく出力する。
【解決手段】位置姿勢出力装置10は、移動体のオドメトリを計算する計算部3から、オドメトリを第1の間隔で取得する。オドメトリ及びオドメトリ以外の情報を用いて移動体の位置及び姿勢を推定する推定部5から、移動体の位置及び姿勢の推定結果を第1の間隔より長い第2の時間間隔で取得する。移動体の位置及び姿勢の推定結果が取得された場合に、更新後の移動体の位置及び姿勢の値が、オドメトリの差分に基づく位置及び姿勢と、移動体の位置及び姿勢の推定結果との間に遷移するように、記憶部13に記憶された移動体の位置及び姿勢を更新する。オドメトリが第1の間隔で取得される度に、当該オドメトリと今回の推定に用いられたオドメトリとの差分を記憶部13に記憶された移動体の位置及び姿勢に足し合わせた上で出力する。
(もっと読む)
検出装置、検出方法、インプリント装置及びデバイス製造方法
【課題】 異なる2つの物体の回転ずれを計測する際に、従来と比較して計測時間の短い検出装置、検出方法、インプリント装置及びデバイス製造方法を提供すること。
【解決手段】 異なる2つの物体にそれぞれ形成された格子マークが重なることによって生じる干渉縞を用いて、前記2つの物体の相対的な回転ずれ量を求める検出装置において、前記干渉縞を検出する検出器と、該検出器で検出された前記干渉縞の傾きから前記異なる2つの物体の相対的な回転ずれ量を求める演算部と、を有することを特徴とする検出装置。
(もっと読む)
孔形状検査方法および孔形状検査プログラム
【課題】被検出形状に縁部における輝度変化を除去し、欠けや異物の検出を確実に行える孔形状検査方法および孔形状検査プログラムを提供する。
【解決手段】孔形状良否を判定する孔形状検査方法およびプログラムであって、前記孔の孔形状撮像工程と、前記孔形状画像の2値化画像形成工程と、前記孔の面積が既定値であるかを判定する孔面積判定工程と、前記孔の内形状の孔重心を求める孔重心演算工程と、前記孔形状画像に前記孔重心を中心とする同心フィルターをかけ、前記孔重心を中心とする同心形状上の画素の平均輝度と、1画素の画素輝度と、の差によるフィルタリング画像形成工程と、前記フィルタリング画像の2値化フィルタリング画像形成工程とを有し、前記2値化フィルタリング画像の画素数が所定の値以下である場合、前記孔を良品と判定する良否判定工程を有する孔形状検査方法、およびその検査方法をコンピューターに実行させるプログラム。
(もっと読む)
カメラシステムおよび画像生成方法
【課題】被検物が撮像画像上を移動した場合でも、良好な検波処理画像を得ることができるカメラシステムを提供すること。
【解決手段】所定周期で点灯消灯するパルス光を被検物に照射し、前記パルス光が照射される領域を含む領域を繰り返し撮像し、撮像された画像の画像信号に対して、画素ごとに同期検波処理を行なって、照射される前記パルス光の点灯消灯のタイミングに同期した検波処理画像を生成する際において、撮像画像上における前記被検物の移動速度に基づいて、画像信号の読出し画素位置を変更するとともに、単位画素未満の移動量が検出された場合には、検出した単位画素未満の移動量に基づいて、読出し画素位置を変更した画像信号の信号出力を補正するカメラシステム。
(もっと読む)
形状測定装置
【課題】従来の形状測定装置は、被測定物体の幅方向に変位計を複数台設置して凹凸を測定していたので、幅方向の分解能が粗いという問題があった。また、スポット光と光走査装置を用いて、被測定物体の幅方向にこの光スポットを走査し、撮像装置で走査されたスポット光を撮像する方法が提案されていたが、撮像装置の受光信号のレベルが低い、または、測定範囲内の受光レベル差が大きく、安定した測定ができないという問題があった。
【解決手段】被測定物体に垂直でかつ幅方向にスリット状の光を照射するスリット光光源と、スリット光源と反対側に配置される撮像装置と、被測定物体に垂直でかつ搬送方向にスリット状の光を照射するスリット光光源と、スリット光源と反対側に配置される撮像装置と、撮像素子上の結像座標を被測定物体の測定座標に変換する座標変換器と、顕在形状演算器を備えた。
(もっと読む)
面形状計測装置
【課題】被検面の形状を高精度に計測する。
【解決手段】被検面10の形状を計測する面形状計測装置であって、光源1からの光を参照光と被検光とに分割して被検光を被検面10に照射する計測ヘッド110と、計測ヘッド110を収納する収納部と、光源1からの光を計測ヘッド110へ入射させ、被検面10に対する被検光の入射角度を変える変更部120と、被検面10で反射され計測ヘッド110に戻ってくる被検光と参照光との干渉光を検出する検出部と、計測ヘッド110の位置を計測する位置計測部116−118と、検出結果および計測結果を用いて被検面10の形状を求める処理部9とを備え、変更部120は、光源1からの光を計測ヘッド110の収納部の外側から計測ヘッド110に入射させ、光源1からの光が計測ヘッド110に入射する位置を変えることによって入射角度を変える。
(もっと読む)
レーザ変位計
【課題】簡易な構成で距離を測定可能なレーザ変位計を提供する。
【解決手段】レーザ光を出射する光源部11、出射光の光束径を拡張し、拡張後の出射光が反射手段30で反射された反射光を集光する光束径変更部14、反射光を受光する受光部16、出射光と反射光を用い、反射手段30までの距離を算出する算出部18、その距離の変位を検出する変位検出部21、検出された変位に関する出力を行う変位出力部22、拡張前の出射光と、光束径変更部14からの反射光との一方を透過させ、他方を反射させることによって、光源部11からの出射光を、中心領域を介して光束径変更部14に透過または反射させ、光束径変更部14からの反射光を、中心領域の外側の領域である外側領域を介して受光部16に反射または透過させる反射部17aを備え、光束径変更部14は、反射光に対する有効口径が出射光の光束径より大きい。
(もっと読む)
長尺材の測長方法及び装置
【課題】エンコーダの機械的不具合による測長異常をその場で検出し、大量の長さ不適合の発生を防止する。
【解決手段】透光する目盛2を付した定規1をラックレール12沿いに架設し、且つ定規1の目盛位置を測定する目盛位置測定器3を鋼管20長さ方向の一端側と他端側の各台車22に搭載しておき、一端側と他端側とでそれぞれ、台車22の移動の間、目盛位置測定器3による測定値とエンコーダによる測定値とを逐次比較し、両者の差が閾値超となったことを測長異常と同定する。
(もっと読む)
検出対象物について頭部分の位置および軸部分の方向を算出する方法、装置およびプログラム
【課題】第1の径を有する軸部分と、軸部分の一端に設けられた第1の径より大きな第2の径を有する頭部分とを含む検出対象物について、頭部分の位置および軸部分の方向をより高速に算出する方法、装置およびプログラムを提供する。
【解決手段】本方法は、少なくとも1つの検出対象物を撮像した入力画像を取得するステップと、入力画像から、軸部分に相当する領域を軸領域として抽出するステップと、入力画像内の明るさの変化から頭部分の候補位置を抽出するステップと、軸領域および候補位置についての高さ情報を取得するステップと、軸領域との間の相対的な位置関係から、軸領域に対応する検出対象物の頭部分に相当する位置を候補位置から抽出するステップとを含む。
(もっと読む)
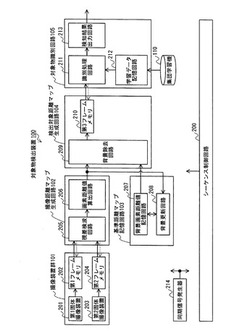
列車停止位置の検出方法及び検出装置
【課題】どのような路線に対しても低コストで導入でき、また装置の保守や点検に手間をかけることなく、列車停止位置を正確に検出する。
【解決手段】本発明の列車停止位置Pの検出方法は、停止動作中の列車Tの前面に対してスポット状の測定光2を左右方向に沿ってライン状に走査しつつ照射する距離センサ3を用いて、距離センサ3から列車Tの前面までの距離を測定し、測定された距離に基づいて、列車Tの停止状態及び停止位置を検出する。
(もっと読む)
空中物位置測定装置、空中物位置測定システム及び空中物位置測定方法
【課題】空中に配置される雲などの測定対象物の位置を容易に正確に測定することができる空中物位置測定装置を提供する。
【解決手段】空中物位置測定装置300であって、第一地点OAにおいて全天カメラを用いて撮像された第一全天画像Z1と、第二地点OBにおいて全天カメラを用いて撮像された第二全天画像Z2とを取得する画像取得部310と、第一全天画像Z1に含まれる測定対象物の画像である第一対象物画像と、第二全天画像Z2に含まれる測定対象物の画像である第二対象物画像とが一致するように、第一全天画像Z1と第二全天画像Z2とを方位を維持しながら重ね合わせて重合画像Z3を生成する画像生成部320と、重合画像Z3内における、第一全天画像Z1の中心位置と第二全天画像Z2の中心位置と測定対象物の位置との位置関係から、空中に配置されている測定対象物の位置を算出する位置算出部330とを備える。
(もっと読む)
人体検知装置及び該人体検知装置を備えた画像処理装置
【課題】人の接近を高精度に判定することができる人体検知装置等を提供する。
【解決手段】それぞれ一対の正負電極10a,10b,20a,20bを有する第1及び第2の焦電型センサ10,20と、各焦電型センサを被覆するレンズ3を備える。垂直状被取付面51に対して直交する面からなる検知エリア6において、第1の焦電型センサの正負電極に対応する第1の正極視野100aと負極視野100b、第2の焦電型センサの正負電極に対応する第2の正極視野200aと負極視野200bを含む検知ブロック300、301が、第1の正極視野と負極視野を結ぶ仮想線100cまたはその延長線と、第2の正極視野と負極視野を結ぶ仮想線200cまたはその延長線が交差する態様で形成されている。交点から被取付面51への垂線について、各仮想線同士が線対称に形成されている。
(もっと読む)
変位検出装置
【課題】高い回折効率を示し、精度良く位置検出を行える変位検出装置を提供することを目的とする。
【解決手段】台形または矩形のレリーフ形状をした回折格子を用いる。また、可干渉光を出射する光源部と、光源部から出射された光束を二つの光束に分割する光束分割部と、を含み、二つの光束をP偏光として回折格子上に照射させる照射光学系と、二つの光束が回折格子により回折されることによって生じる二つの第1回折光をそれぞれ反射し、回折格子上にP偏光として再入射させる反射光学系を備える。また、回折格子に再入射した二つの第1回折光が回折されて生じる二つの第2回折光を干渉させる干渉光学系と、干渉光学系により干渉した光を受光する受光部と、受光部において取得した干渉信号に基づいて、回折格子の位置情報を検出する位置検出部を備えるものとする。そして、回折格子のレリーフの周期を、回折格子に入射する可干渉光の波長の1.5倍以下とする。
(もっと読む)
塗布位置検査装置及び方法並びにプログラム
【課題】自動的に基準軌跡の抽出と許容領域の生成とを実行することができ、容易に部品形状の変更に対応することができる塗布位置検査装置を提供する。
【解決手段】シール剤Sが塗布されたワークWを撮像する撮像装置2と、撮像装置2によって撮像された撮影画像から、シール剤Sの塗布軌跡を抽出する軌跡抽出部4−1と、所定の基準軌跡を記憶する記憶部5と、軌跡抽出部4−1により抽出されたシール剤Sの塗布軌跡が、記憶装置5に記憶されている所定の基準軌跡を中心とする許容領域内に収まっているか否かを判定する形状判定部4−2とを備える。
(もっと読む)
金属缶端部の巻締検査装置及び検査方法
【課題】簡単な構成にて巻締め検査を精度よく行える金属缶端部の巻締検査装置及び検査方法を提供する。
【解決手段】カメラ32からの取得画像から極座標展開画像112を形成し(S4)、巻締め部3内側側面61の内側フランジエッジ122と(S5)、外側側面62の外側フランジエッジ124を認識して(S6)、内側フランジエッジ122から外側フランジエッジ124までの幅寸法131が閾値内にあるか否かを判断する(S8)。閾値内の場合、内側側面61の内帯幅161の長さ方向での変化量、及び外側側面62の外帯幅162の長さ方向での変化量を検査し(S9)、これらの変化が大きい場合、巻締不良フラグをセットして(S10)終了する一方、変化が小さい場合には、巻締不良フラグをリセットして(S11)終了する。
(もっと読む)
奥行計測装置
【課題】複数の奥行計測装置が近傍で動作している場合、近傍の奥行計測装置が発光する平面パターンが妨害して平面パターンの認識ができず奥行計算ができない場合があった。
【解決手段】平面パターンの発光を間欠的にして、ほぼ発光期間のみを露光期間とすることにより、近傍の奥行計測装置が発光する期間に露光する確率を減らす。
これにより平面パターンが認識できなくなる確率が減じる。また、平面パターンが認識できないことを検出して発光のタイミングを変える。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】計測対象面への入射方向を挟んで対称に配置され受光面の計測対象面に対する傾斜角度が各対毎に相異なる2対の位置検出素子群25A,25Bを有し、走査光の計測対象面からの反射光の受光位置を検出する位置検出部25と、各位置検出素子が受光する光量が所定の範囲内にあるか否かを判定する受光量判定部34と、同一の位置検出素子群に属する位置検出素子による反射光の受光位置検出結果の差異の大きさが所定の基準値以下であるか否かを判定する受光位置検出結果判定部35とを備え、位置検出部25の受光位置検出結果に基づき受光量判定部34および受光位置検出結果判定部35の判定結果を加味して計測対象面の3次元認識画像を形成する構成とする。
(もっと読む)
計測方法
【課題】内視鏡装置を用いて三次元形状の計測を短時間で行う計測方法を提供すること。
【解決手段】被検物の三次元形状を内視鏡装置を用いて計測する計測方法であって、所定の縞パターンを内視鏡装置の1箇所から被検物に投影し、被検物において縞パターンが投影された部分を撮像して1枚のパターン投影画像を取得し、空間的位相シフト法またはフーリエ変換法を用いて縞パターンが投影された部分の三次元形状を1枚のパターン投影画像から計測することを特徴とする。
(もっと読む)
41 - 60 / 1,068
[ Back to top ]