
Fターム[2F065QQ13]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の微分、差分 (1,068)
Fターム[2F065QQ13]に分類される特許
101 - 120 / 1,068
画像プローブの校正方法とタッチプローブ
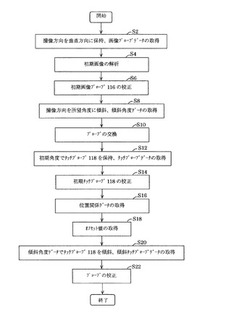
【課題】簡易的な構成で画像プローブの校正を高精度に行いながら画像プローブによる被測定物の対象拡大と画像プローブの使い勝手の向上が可能となる。
【解決手段】撮像方向(光軸Dの方向)を垂直方向に保持し画像プローブデータを取得する工程(ステップS2)と、撮像方向を所望角度に傾斜させ傾斜角度データを取得する工程(ステップS8)と、プローブ交換工程(ステップS10)と、撮像方向を垂直方向に保持した際の初期角度でタッチプローブ118を保持しタッチプローブデータを取得する工程(ステップS12)及び位置関係データを取得する工程(ステップS16)と、傾斜角度データでタッチプローブ118を傾斜させ傾斜タッチプローブデータを取得する工程(ステップS20)と、画像プローブデータ等に基づいて、所望角度への傾斜後の画像プローブ116の焦点位置及び光軸D周りの回転角を校正する工程(ステップS22)と、を含む。
(もっと読む)
3次元データと2次元データの統合方法及びこれを用いた見守りシステム、監視システム

【課題】距離画像データ等の3次元データと2次元画像データとの対応付け、距離画像データと2次元画像データを相補的に用いることにより柔軟で信頼性の高い認識結果が得られる、3次元データと2次元画像データの統合方法およびそれを用いた頑健な監視・見守りシステムを提供する。
【解決手段】システムは、2次元データを取得する2次元データ取得ステップと、3次元データを取得する3次元データ取得ステップと、上記2次元データと前記3次元データの位置を対応付ける対応付けステップと、上記対応付けステップで対応付けた結果に基づいて上記3次元データを2次元データ上に重畳する重畳ステップとを備える。
(もっと読む)
物体検知センサ及び噴霧装置
【目的】 本発明の目的は、受光素子間の受光量の設定又は調整を行う必要がない物体検知センサ及び噴霧装置を提供する。
【構成】 物体検知センサは、人Pの接近により受光量が変化し、当該受光量の変化に応じた電圧信号αを出力する受光素子200aと、受光素子200aと異なる方向に向けて配置されており且つ環境光の変化により受光量が変化し、当該受光量の変化に応じた電圧信号βを出力する受光素子200bと、受光素子200bの電圧信号βがしきい値以下であるか否かを判定し、この判定の結果、電圧信号βがしきい値以下であると判定したとき、電圧信号αに基づき人Pの接近を検知する制御部400とを備えている。
(もっと読む)
情報処理方法及び情報処理装置
【課題】 複数の撮像装置をそれぞれ処理装置に接続した状態で、第1の撮像装置の位置姿勢情報計測値を第2の撮像装置の位置姿勢に変換するための較正情報をより簡便に取得することを目的とする。
【解決手段】 マスタ演算処理装置300は、ビデオカメラ120が撮影したランドマークを含む撮影画像を入力し、ビデオカメラ120の位置姿勢を算出し、スレーブ演算処理装置1300に送信する。スレーブ演算処理装置1300は、ビデオカメラ1120で撮像された画像上のランドマークの識別番号及び画像座標を取得し、(画像座標−世界座標−マスタ撮像装置位置姿勢)の組としてデータリストを生成する。生成したデータリストより較正情報算出部1340は、画像座標の理論値と実際の観測値との誤差が最小となるようにビデオカメラ120からビデオカメラ1120への位置姿勢の較正情報を算出する。
(もっと読む)
三次元形状測定装置
【課題】被検物の一部に単位距離あたりの形状変化が大きい部分があっても、データ取得時間を短くする。
【解決手段】検査光を被検物に照射する照射部21と、検査光と被検物とを相対移動させる移動部と、検査光が照射された被検物を撮像し、撮像結果を出力する撮像部22と、撮像部22の撮像結果に基づいて、前記被検物の三次元形状を前記相対移動の方向に間隔をおいて演算する座標算出部53と、被検物の形状に応じて前記間隔を変更する制御部41と、を備える。
(もっと読む)
回転制御装置及び回転制御方法
【課題】 コンパクトな構成で作業台の回転制御の精度の向上を図ることができる回転制御装置及び回転制御方法を提供する。
【解決手段】 回転体の回転に連動して回転するロータリーエンコーダの読取信号を処理して回転ムラ信号と回転ブレ量信号とを生成し、回転駆動部において回転ムラ信号に応じて回転体の回転速度サーボ制御をなすステップと、処理部において回転ブレ量信号に応じてワークに対する位置サーボ制御をなす。
(もっと読む)
計測装置
【課題】光路長差が小さくなっても被加工物の厚みまたは上面高さ位置を正確に計測することができる計測装置を提供する。
【解決手段】被加工物保持手段に保持された被加工物の基準面から上面までの距離を計測する計測装置であって、被加工物の上面で反射した反射光と基準面で反射した基準反射光を受光したイメージセンサーからの検出信号に基づいて分光干渉波形を求め、この分光干渉波形における各波長毎の隣接する1またはn個隣の光強度との差を演算して分光干渉差分波形を求め、分光干渉差分波形と理論上の波形関数に基づいて波形解析を実行し、被加工物の上面で反射した反射光の光路長と基準面で反射した基準反射光の光路長との光路長差に基づいて被加工物の基準面から上面までの距離を求める。
(もっと読む)
画像処理装置および画像処理方法
【課題】高密度の視差情報の導出を安価な低処理能力の計算機で実現する。
【解決手段】画像処理装置120は、現在より過去における1または複数回分の視差を示す視差情報を保持するデータ保持部152と、光軸を異にして撮像された2つの画像データを取得する画像取得部150と、2つの画像データのうち予め定められたいずれか一方の画像データの任意の画像位置における基準部分画像に対応する、他方の画像データの対応部分画像の探索範囲を、任意の画像位置に関連付けて保持された過去における視差情報に示された視差に基づいて決定する探索範囲決定部160と、決定された他方の画像データの探索範囲から対応部分画像を探索する部分画像探索部162と、任意の画像位置と探索された対応部分画像の画像位置とから視差を導出し、視差を示す視差情報を、任意の画像位置に関連付けてデータ保持部に保持させる視差導出部164とを備える。
(もっと読む)
計測方法及び計測装置
【課題】非球面を含む被検面の計測に有利な技術を提供する。
【解決手段】非球面を含む被検面を照明する第1の光学系と前記被検面からの光を検出面を有する検出部に導く第2の光学系と、既知の非球面形状を有する基準面を前記検出面と共役な面に配置し、前記基準面からの光が前記検出面に入射する角度を前記検出面上の複数の座標のそれぞれについて前記検出部で検出する第1のステップと、前記被検面を前記共役な面に配置し、前記被検面からの光が前記検出面に入射する角度を前記検出面上の複数の座標のそれぞれについて前記検出部で検出する第2のステップと、前記第1のステップで検出された角度と前記第2のステップで検出された角度との角度差により、前記被検面の面形状と前記既知の非球面形状との差分形状を求め、前記既知の非球面形状に前記差分形状を加えることで前記被検面の面形状を算出する計測方法を提供する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体以外の物体で反射した検出光の影響を受けずに対象物体の位置を検出することができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10においては、複数の検出用光源12を順次点灯させると、第1受光部31は、対象物体Obで反射した検出光L3を受光する。その際、第1受光部31には、対象物体Ob以外の物体Sbで反射した検出光L4が入射する場合があるが、光学式位置検出装置10には、検出対象空間10Rに入射しない補償光L5を出射する補償用光源部81と、検出光L2、L3、L4を受光せずに補償光L5を受光する第2受光部32とが設けられており、位置検出部50は、第1受光部31での受光強度と第2受光部32での受光強度との差に基づいて対象物体Obの位置を検出する。
(もっと読む)
光学式変位センサ及び該光学式変位センサにおける段差検出方法
【課題】段差候補となる期間を検出してから、ベルトコンベア等の搬送装置の振動等による変位量の変動、時間方向の変位量の変動の影響を低減し、より確実に段差を検出することができる光学式変位センサ及び該光学式変位センサにおける段差検出方法を提供する。
【解決手段】受光器の出力に基づいて検出対象物の変位量を算出し、所定のタイミングでサンプリングする。前回サンプリングした変位量と今回サンプリングした変位量との差分値を算出し、算出した差分値に基づいて段差期間と非段差期間とを判別する。段差期間と判別された期間における差分値の積算値を算出し、段差期間と判別された期間ごとに算出した積算値の最大値と第一の閾値とを比較して段差であるか否かを判別する。
(もっと読む)
欠陥検査方法及びその装置
【課題】
複数の方向に配置した複数の検出器からの信号を基板の高さ変動の影響を受けることなく処理して基板上のより微細な欠陥を検出することを可能にする。
【解決手段】
第1の集光検出手段と第2の集光検出手段とにそれぞれ複数列の光センサアレイを有する光電変換器を備え、処理手段は第1及び第2の集光検出手段のそれぞれの複数列の光センサアレイからの検出信号を用いて試料の表面に対する第1及び第2の集光検出手段の焦点位置のずれを求め、この求めた第1及び第2の集光検出手段のそれぞれの焦点位置のずれに応じて第1の集光検出手段から出力された検出信号と第2の集光検出手段から出力された検出信号とを補正し、この補正した第1の集光検出手段から出力された検出信号と第2の集光検出手段から出力された検出信号とを統合して試料上の欠陥を検出するようにした。
(もっと読む)
乗員検知装置
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
測定装置
【課題】測定対象物の位置を高精度に測定する測定装置を低コストで提供する。
【解決手段】変調部によって第1周波数で変調された基準光からデジタル基準信号を取得し、前記第1周波数で変調された光が照射された測定対象物から反射された測定光からデジタル測定信号を取得し、前記デジタル基準信号と前記デジタル測定信号とを処理して前記測定対象物の位置を測定する装置は、前記デジタル測定信号に前記デジタル基準信号と同期したサイン信号又はコサイン信号を乗算して、第2周波数および高調波の成分を有する信号をそれぞれ出力する第1および第2同期検波部と、前記第1又は第2同期検波部から出力された信号をデシメーション周波数でフィルタリングして前記高調波の成分を減衰させる第1および第2デシメーションフィルタと、前記第1および第2デシメーションフィルタから出力された信号に基づいて前記測定対象物の位置を演算する演算部とを備える。
(もっと読む)
対象物検出装置及び方法
【課題】広い監視領域における大きさが異なる複数の対象物の位置や速度を推定できるようにすること。
【解決手段】本実施形態に係る対象物検出装置は、複数台のカメラにより道路上に存在する対象物を撮影した基準画像上で分割した短冊状領域の各点に関して、他のカメラで撮影された参照画像上で対応する点を算出する対応点算出部4と、各短冊状領域内の各点と、求められた参照画像の対応点との間の画像特徴量の一致度を算出する画像一致度算出部5と、短冊状領域の高さと対象物の接地位置とを変数として画像特徴量の一致度を最大にする接地位置関数を生成する接地位置算出部6と、接地位置関数における短冊状領域の高さに基づいて対象物の高さを算出する対象物高さ算出部7とを備える。
(もっと読む)
配管内監視装置およびそれを用いる配管内監視システム
【課題】配管内の状態を監視する装置において、流量低下要因を容易に判別可能とする。
【解決手段】配管経路に検査用透明配管11を介在し、照明光源15でその検査用透明配管11の外側から検査用の照明光を照射し、それによる該検査用透明配管11の透過または反射光をカメラ16で撮像し、パーソナルコンピュータ17で光強度を解析することで、該検査用透明配管11の内壁への付着物の状態を検出する。したがって、設備経路配管全体の内壁の錆び、スケール、スライム等の付着状態を、簡便に安価な方法で連続して監視することができる。また、経路配管全体の情報が得られるので、配管内流量に低下が生じている場合、その原因が配管全体の内壁への固体付着による管径細りなのか、局所的な異物付着なのかを簡単に判別することもできる。
(もっと読む)
平面度測定装置
【課題】変位計と測定対象物との間の相対移動に起因する誤差を適切に補正すること。
【解決手段】測定対象物の一次元形状を測定する変位計と測定対象物との間の相対位置をずらしながら測定対象物の平面度を測定する平面度測定装置は、第1方向の第1測定ラインに沿って被測定面の一次元形状を測る第1測定と、第1測定ラインと第1交差点P2で交差する第2方向の第2測定ラインに沿って被測定面の一次元形状を測る第2測定と、第2測定ラインおよび第1測定ラインとそれぞれ第2交差点P3および第3交差点P1で交差する第3方向の第3測定ラインに沿って被測定面の一次元形状を測る第3測定と、第1測定による第1の一次元形状を示す第1の測定値列DL1、第2測定による第2の一次元形状を示す第2の測定値列DL2、および第3測定による第3の一次元形状を示す第3の測定値列DL3を第1交差点P2乃至第3交差点P1においてそれぞれ一致させるように第1の測定値列DL1乃至第3の測定値列DL3を補正する補正処理と、を行う。
(もっと読む)
移動量推定装置および移動量推定方法
【課題】移動体の移動量を精度よく推定する装置または方法を提供する。
【解決手段】移動量推定装置は、投影部、抽出部、推定部を備える。投影部は、移動体に取り付けられた複数のカメラにより得られる各映像についてそれぞれ路面投影像を生成する。抽出部は、投影部により生成される複数の路面投影像において複数のカメラの視野が重複する共通視野領域から、路面投影像間で互いに一致する画像パターンを抽出する。推定部は、抽出部により抽出される画像パターンの時間変化に基づいて、移動体の移動量を推定する。
(もっと読む)
接触可能性検知装置、接触可能性検知方法、及びプログラム
【課題】対象車両の自車両への接触の可能性の有無の判定精度を向上させる。
【解決手段】測距部11は、自車両と対象車両との間の距離の計測を行う。方位角変化率算出部12は、自車両に搭載されている車載カメラ2が対象車両を撮像して得た時系列の撮像画像に基づいて、当該対象車両の水平線方向の端部を当該自車両から見たときの方位角の時間変化率を算出する。そして、判定部13は、測距部11により計測された距離と、方位角変化率算出部12により算出された、前述の方位角の時間変化率とに基づいて、対象車両の自車両への接触の可能性の有無を判定する。
(もっと読む)
位置および動作判定方法および入力装置
【課題】被検出体の位置を検出するとともに、被検出体の動作を的確に、かつ、高精度に判定する。
【解決手段】被検出体から発せられた赤外線を受光した赤外線検出部から出力される赤外線検出信号に基づいて、被検出体の位置および動作を判定する位置および動作判定方法であって、赤外線検出部は視野角制限体を有する少なくとも2個の赤外線センサ部を有し、2個の赤外線センサ部からそれぞれ得られる赤外線の強度の差または比をあらわす被検出体の位置信号と、赤外線の強度の各々の差または比を時間の関数とし、時間で微分することにより得た信号と、に基づいて被検出体の動作を判定する。
(もっと読む)
101 - 120 / 1,068
[ Back to top ]