
Fターム[2F065QQ13]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の微分、差分 (1,068)
Fターム[2F065QQ13]に分類される特許
21 - 40 / 1,068
可動式ホーム柵監視用カメラ装置
【課題】都市部の駅ホームや、地下鉄の駅ホームでは、駅ホームのスペースが狭く、列車の乗降口または可動式ホーム柵の開閉部を広範囲にするための監視用カメラ装置のカメラ部の設置スペースを十分に確保できない。
【解決手段】本発明の可動式ホーム柵監視用カメラ装置は、可動式ホーム柵と、反射鏡と、前記可動式ホーム柵内に設置し前記反射鏡を介して前記可動式ホーム柵を撮像するカメラ部と、前記カメラ部が撮像した画像から乗客を検出する画像処理部と、モニタとを備え、前記画像処理部は、前記カメラ部が撮像した画像から前記可動式ホーム柵の開閉部およびその周辺を切り出して合成した合成画像を作成し、前記モニタは、前記合成画像を表示する。
(もっと読む)
回路基板の個体識別装置および個体識別方法

【課題】回路基板の個体識別を簡便かつ容易に実現する回路基板の個体識別装置および個体識別方法を提供すること。
【解決手段】回路基板100上の複数の計測対象110の位置を計測し、計測対象110の計測値と計測対象110の設計値との差を計測対象110ごとの位置情報として取得する位置情報取得手段10と、位置情報取得手段10によって取得された位置情報の組み合わせを基板識別符号として登録する登録手段20とを備える回路基板の個体識別装置。
(もっと読む)
欠陥検査装置
【課題】製造ラインを連続して搬送される開口を塞ぐシール部を有する被検査物に対して、特殊領域特定のために準備工程を必要とせず、検査時間の大幅な短縮が可能な、効率の良い検査性能に優れた検査装置を提供する。
【解決手段】容器を搬送する手段と、第一の光学手段と、第一の光学手段の容器搬送方向の下流に設けられた第二光学手段と、第一の特殊領域特定手段と、第一の特殊領域に基づいてシール部の液漏れ欠陥を検出する第一の検査手段と、前記エッジ座標と、第一の撮像手段と第二の撮像手段の取り付け角度の角度差と、第一の撮像手段と第二の撮像手段から得られた撮像画像における検査領域の中心座標から、第二の撮像手段によって得られた画像の第二の特殊領域を特定する第二の特殊領域特定手段と、第二の撮像手段によって撮像した画像の第二の特殊領域に基づいて容器の異物欠陥を検出する第二の検査手段と、を備えたことを特徴とする欠陥検査装置。
(もっと読む)
計測装置
【課題】高速かつ高精度に被検面の形状を計測することが可能な計測装置を提供すること
【解決手段】計測装置は、光コム光源101から射出された光束を、被検光束と参照光束に分割するPBS15と、前記参照光束と前記被検光束の光路長差を変化させる遅延素子9と、前記被検光束と前記参照光束が干渉して形成する干渉縞を撮像する撮像素子24と、遅延素子が光路長差を変化させて撮像された干渉縞の信号に基づいて被検面23の位置を算出する解析器25と、を有する。
(もっと読む)
計測装置および計測方法
【課題】高精度に被検面と参照面の間の絶対距離を計測可能な計測装置および計測方法を提供する。
【解決手段】第1の基準波長λ1と第2の基準波長λ2との間で波長走査が可能な光源11と、第3の基準波長λ3の光を射出する光源10を有する光波干渉計測装置は、各波長に対応した干渉光の信号に基づいて被検面と参照面との間の光路長に相当する位相の誤差を補正し、誤差が補正された位相に基づいて被検面と参照面の間の絶対距離を算出する処理部19を有する。
(もっと読む)
カメラ状態測定装置およびカメラ状態測定方法
【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
画像形成装置、パターン位置決定方法、画像形成システム
【課題】シート材の影響を抑制してテストパターンの位置を検出する画像形成装置を提供すること。
【解決手段】液滴の吐出タイミングを調整する装置100であって、テストパターンからの反射光を読み出す読み取り手段30と、均一パターンの印刷データを記憶する印刷データ記憶手段54と、均一パターンを記録媒体に印刷した後、テストパターンを均一パターン上に印刷するパターン形成手段52と、読み取り手段を等速で移動させる相対移動手段313と、テストパターンが形成された記録媒体に対し読み取り手段が相対移動しながら、テストパターンを光が横断する際に前記受光手段が受光した反射光の第1の検出データを取得する第1の検出データ取得手段617と、予め定められた上限値と下限値の間に含まれる第1の検出データにライン位置決定演算を施してテストパターンの位置を検出する位置検出手段616、を有する。
(もっと読む)
光検出装置
【課題】入射光の入射位置及び入射方向を同時に検出することができるようにした光検出装置を提供する。
【解決手段】第一の平面内にマトリックス状に配置した複数個の光検出素子から成る第一の光センサアレイ11と、第一の平面の光入射側と反対側にて所定間隔dで平行に隔置した第二の平面内にマトリックス状に配置した複数個の光検出素子から成る第二のセンサアレイ12と、スポット状の入射光による第一及び第二の光センサアレイ11、12からの検出信号に基づいて、当該入射光の第一及び第二の光センサアレイ11、12上における入射位置P1,P2を演算すると共に、演算した入射位置間の偏位量ΔPから当該入射光の入射角度θを演算して、当該入射光の入射位置及び入射方向を決定する信号処理部14と、を含むように、光検出装置10を構成する。
(もっと読む)
変位測定装置及び光無線通信システム
【課題】光無線通信システムのトラッキング機構の小型化、測定精度向上等を実現する。
【解決手段】送信ユニット11に2つの距離センサ14,15を設け、受信ユニット21に位置指標部23と基準高さ部24を設ける。位置指標部23は、複数のエリアに区画され且つ各エリア毎に高さが異なる三次元形状に形成され、基準高さ部24を基準とした各エリアの高さとエリア位置との関係を変位測定テーブルデータとして記憶する。各距離センサ14,15によって位置指標部23の1つのエリアまでの距離と基準高さ部24までの距離をそれぞれ測定し、これら2つの距離測定値の差分と変位測定テーブルデータとに基づいて位置指標部23のうちの第1の距離センサ14で測定したエリア位置を特定することで、受信ユニット21の変位量及び変位方向を判定し、その判定結果に基づいて送信部12と受信部22との光軸ずれを補正するように光軸ずれ補正機能を作動させる。
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
形状計測装置、横座標校正方法及び光学素子の製造方法
【課題】汎用性の高い横座標の校正方法によって横座標を校正する形状計測装置、及びその横座標校正方法を提供する。
【解決手段】複数の開口が形成され、これら複数の開口の配列によって校正パターンを形成するアパーチャー板20をワークWの被検面Wsの前面に配置する。この開口を通過すると共に、被検面Wsで反射され、再度開口を通過した測定光Lmを撮像素子5によって検出する。撮像素子上にて結像した校正パターンの横座標位置と、予め計測されている校正パターンの基準横座標位置とを、演算装置7によって比較することによって、形状計測装置1の横座標を校正する。
(もっと読む)
バーコード外観検査システム、バーコード外観検査方法
【課題】バーコードの外観不良を簡易に検査できるバーコード外観検査システム等を提供する。
【解決手段】バーコード外観検査システムの画像処理装置の制御部は、カメラで撮影されたバーコード6の撮影画像データを取得し、バーコード6のバー配列方向の両端部のエッジ65の位置と、バー配列方向の両端部の近傍におけるバー長さ方向の両端部のエッジ67a、67bの位置を算出する。続いて、これらエッジ65、67a、67bの位置に基づきバーコード6の中心座標等を演算して求め、これに基づきバーコード6の欠陥検出領域を生成する。次に、この欠陥検出領域において、バー長さ方向の微分フィルタ演算と演算結果の2値化を行い、バーコード6の汚れ61、抜け63等の欠陥領域を検出する。いずれかの欠陥領域の面積が所定値以上の場合に、画像処理装置の制御部は、バーコード6に外観不良があると判定する。
(もっと読む)
高さ計測装置及び方法
【課題】被計測物が様々な屈折率で、かつ様々な厚さの透明媒質の下に配置されていても、その被計測物の高さを容易に計測する。
【解決手段】高さ計測装置1は、照明光から分岐された第1照明光を被計測物6に導く対物レンズ24と、照明光から分岐された第2照明光を参照ミラー28に導く対物レンズ26と、第2照明光の光路長を調整する移動部36と、被計測物6及び参照ミラー28で反射される2つの照明光の干渉像を撮像する高速度カメラ12と、対物レンズ24と被計測物6とを光軸方向に相対移動するピエゾ駆動装置18と、を備える。
(もっと読む)
情報処理装置及び情報処理方法
【課題】計測装置と計測対象物体との間の位置または/及び姿勢の関係があいまい性を含んだ場合であっても、高精度に物体の位置姿勢を計測できるようにする。
【解決手段】撮像時刻におけるロボットのモーション情報から、撮像装置と対象物体の位置姿勢移動量に変換して計測データとして位置姿勢更新に用いる。ロボットのモーション差分という確度の高い情報を計測データとして加えることにより、精度および安定性を向上させるようにする。また、撮像時刻の異なる距離画像と濃淡画像の幾何的関係を、ロボットアームの軌跡情報を用いて求めることで、両者の情報を同時に利用して位置姿勢推定を行うようにすることにより、全体のデータを同時に用いることを可能にする。
(もっと読む)
撮像装置及びプログラム
【課題】CMOS型イメージセンサ等を用いて、ローリングシャッター方式で撮像されたボール像が歪んでいても、ボールの運動を正確に解析することができるようにする。
【解決手段】撮像装置100は、ボール像が楕円形に歪んだ状態で含まれるフレームを、内領域A3とその内領域A3と内領域A3の外側の外領域A4とを有する楕円分離度フィルターによってフィルタリング処理することによって、分離度を算出する分離度算出手段7gと、内領域A3の中心位置、長径、短径及び傾斜角を変更しながら分離度算出手段7gによって算出される分離度が最大となる中心位置、長径、短径及び傾斜角をボール像の中心位置、長径、短径及び傾斜角として推定する推定手段7hと、推定手段7hによって推定されたボール像の中心位置の差分とフレーム間のフレーム数とフレームレートとから、ボールの速度を算出する速度算出手段7pと、を備える。
(もっと読む)
位置検出システムおよび入力機能付き表示システム
【課題】光源部からの指示部材の距離にかかわらず、受光素子からの出力を適正なレベルに設定することのできる位置検出システム、および入力機能付き表示システムを提供すること。
【解決手段】位置検出システム1において、指示部材Obの外周面には再帰反射部Sbが設けられている。光源部12は、基準面41aに平行な仮想面P12に沿って検出光L2を出射する。受光素子13は、仮想面P12よりZ軸方向の一方側Z1において、受光面130に対する法線方向L130が基準面41aに交差するように配置されている。指示部材Obと光源部12との距離が長い場合には、短い場合に比して、再帰反射部Sbで反射した光が受光素子13の受光面130に効率よく入射する。
(もっと読む)
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
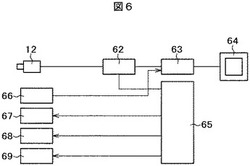
測定装置
【課題】入遮光位置の測定精度を高める。
【解決手段】検出光を出射する投光素子62と、前記投光素子62と対向配置されたイメージセンサ85と、前記イメージセンサ85から受光信号を読み出す信号読出回路90と、前記受光信号のレベルと所定の基準レベルとを比較し、被検出物が前記検出領域を通過した際に、前記受光信号のレベルが基準レベル以上から前記基準レベル以下に、あるいは前記基準レベル以下から前記基準レベル以上に変化する入遮光位置を測定して出力する測定回路120とを備え、前記信号読出回路90と前記測定回路120の間に、前記信号読出回路90で読み出される受光信号波形から所定周波数の信号成分を除去する第一フィルタ回路100を備える。
(もっと読む)
幅測定装置
【課題】安価でかつ信頼性の高い幅測定機能を有し、被測定物体の幅を高精度に測定することができる幅測定装置を提供する。
【解決手段】被測定物体1の上方より外側に配置され、その一方側にスリット状光を照射する光源2aと、そのスリット状光を撮像する一方側2次元撮像部4aと、被測定物体1の一端部28aの幅方向座標を演算する一端部幅方向座標演算部7aと、一端部高さ方向座標演算部8aと、一端部位置演算部9aと、被測定物体1の上方より外側でかつ光源2aと反対側に配置され、その他方側にスリット状光を照射する光源2bと、そのスリット状光を撮像する他方側2次元撮像部4bと、他端部28bの幅方向座標を演算する他端部幅方向座標演算部7bと、他端部高さ方向座標演算部8bと、他端部位置演算部9bと、一端部28aおよび他端部28bの空間位置に基づいて、被測定物体1の幅を演算する幅演算部10と、を備える。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】検出空間を拡張した場合でも、装置を大型化せずに対象物体の位置を精度よく検出することができる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10では、光源部12から検出光を出射した際、受光部13は対象物体Obからの反射光を第1受光素子131および第2受光素子132で受光する。第1受光素子131および第2受光素子132は、第1受光素子131の受光面131aに対する法線方向と第2受光素子132の受光面132aに対する法線方向との交差角度θcが90°を超え、180°未満となる値、好ましくは、120°を超え、140°未満となる値に設定されている。
(もっと読む)
21 - 40 / 1,068
[ Back to top ]