
Fターム[2F065RR05]の内容
光学的手段による測長装置 (194,290) | 比較基準データの作成、設定 (2,769) | 比較相手 (2,648) | 形状特性値 (511)
Fターム[2F065RR05]に分類される特許
201 - 220 / 511
パターン検査装置、パターン検査方法、および微細構造体の製造方法

【課題】本発明は、パターン検査の検査精度を向上させることができるパターン検査装置、パターン検査方法、および微細構造体の製造方法を提供する。
【解決手段】被検査体に形成されたパターンに関する参照データと、前記パターンを検出することで得られた検出データと、を比較して前記パターンの検査を行うパターン検査装置であって、前記パターンを複数の領域に分割して前記複数の領域毎または前記複数の領域間毎の補正条件を求め、前記複数の領域毎または前記複数の領域間毎の少なくともいずれかにおいて対応する補正条件を適用して前記参照データを作成する補正処理部を備えたこと、を特徴とするパターン検査装置が提供される。
(もっと読む)
ボタンの表裏判別装置

【課題】外周縁の断面形状が表裏で異なるボタンの表裏を確実に判別することのできるボタンの表裏判別装置を提供する。
【解決手段】ボタンBが載置される載置面Waと、載置面Waに斜光Laを照射する斜光照明装置7と、記斜光Laが載置面Waに照射された際に、載置面上に形成されるボタンBの影が投影されるように、複数の受光素子が配列されて載置面Waに埋設されたイメージセンサ3と、イメージセンサ3の出力電圧を所定の検出レベルと比較することにより、ボタンBの影を検出する検出手段16と、検出レベルを、斜光照明装置7からのイメージセンサ3の各受光素子の距離に応じて斬減するように設定する検出レベル設定手段19と、斜光Laを照射した際に、前記検出手段16で検出された影の長LSさに基づいてボタンBの表裏を判別する制御手段5とを設ける。
(もっと読む)
寸法測定装置
【課題】搬送する物品の載置状態や搬送速度が一定でない場合でもそれに影響されることなく、搬送中の物品の寸法を正しく測定することができる寸法測定装置を提供する。
【解決手段】物品を搬送する搬送装置を備えた寸法測定装置であって、前記搬送装置の搬送方向に沿って所定間隔をおいて配置され、該搬送装置で搬送される物品を検出する複数個の物品検出センサと、前記搬送中の物品の所定位置の両側端部を検出する側端部検出センサと、前記側端部検出センサの一定時間間隔で検出した信号について、一つの物品検出センサが物品を検出してから次の物品検出センサが前記物品を検出するまでの信号を前記の物品検出センサ間の距離に応じた位置に記憶し、少なくとも物品の側端部を前記側端部検出センサが検出しなくなるまで記憶するメモリと、前記メモリのデータから物品の外形寸法を算出する寸法算出手段と、を備える。
(もっと読む)
形状認識装置
【課題】計測対象物のベースとなる形状を基準とした歪みを抽出し得る形状認識装置を構成する。
【解決手段】3次元データに基づいて、ベース形状データ生成手段16が、計測対象物Tの本来の表面形状を複数の曲率で表すベース形状データを生成し、詳細形状データ生成手段17が計測対象物Tの詳細な表面形状を複数の曲率で表す詳細形状データを生成する。これらのデータの曲率値の同一の領域の曲率同士を比較することで歪みを求め外面形状を評価する形状評価手段19を備えた。
(もっと読む)
形状認識装置
【課題】2次元構造の断面データが表す形状曲線の近似するための処理を簡単に行い得る装置を構成する。
【解決手段】ベース形状データ生成手段16が、設定領域の3次元データを切り出し計測対象物Tの本来の表面形状を示す2次元データを生成する。詳細形状データ生成手段17が設定領域の3次元データを切り出し計測対象物Tの詳細な表面形状を示す2次元データを生成する。これらの2次元データから曲率取得手段18が曲率を算出する。この曲率取得手段18は、2次元データのサンプルポイントの中央付近を頂点とした点群上又は点群付近を通過する2次曲線を近似曲線として適用し、適用された近似曲線のサンプルポイント中央部での曲率に基づいて前記曲率を算出する。
(もっと読む)
テンプレートマッチングシステムおよびテンプレートマッチング方法
【課題】テンプレートマッチングにより取得したテンプレートに基づいて、部品が載置されている姿勢が安定的か、否かを判定し、不安定な場合は警告を生成する。
【解決手段】テンプレートマッチング部100は、取得したワーク130の設計データに基づいて形状を抽出し、複数の姿勢で平面に射影した複数の射影像を生成し、それぞれの姿勢に応じて形状の姿勢を仮想的に変化させ、形状の姿勢が復元する結果に基づいて、姿勢毎に載置された場合の安定度を算出し、射影像のそれぞれに応じて生成したテンプレートと安定度と対応付けて記憶し、撮影したワーク130の撮影画像に対応するテンプレートをマッチングにより選択し、選択したテンプレートに対応した安定度に基づいて、ワーク130が載置された姿勢について警告するか、否かを判定し、警告すると判定した場合、警告を示す警告信号を生成する。
(もっと読む)
スキャタロメトリ識別法を利用したオーバーレイ測定
【課題】半導体ウェーハの2つの層の間のアライメント・オーバーレイの非破壊特性決定方法を提供する。
【解決手段】波長または入射角度の関数としての1つの実施例として、入射ビームの放射は、ウェーハ表面上に向けられ、結果として得られる回折ビームの特性が決定される。スペクトル的、または角度的に分解された回折ビームは、オーバーレイ・フィーチャのアライメントと関連する。計算された回折スペクトルのライブラリは、オーバーレイ・アライメントにおける予期される変動の全ての範囲をモデル化することにより確立される。少なくとも2つの層におけるアライメント・ターゲットを有する実際のウェーハの検査により得られたスペクトルは、実際のアライメントの特性を決定するため、最も適合するもの(ベスト・フィット)を識別するように、ライブラリと比較される。比較の結果は、上流および/または下流処理制御への入力として使用される。
(もっと読む)
薄膜検査装置及びその方法
【課題】複数の薄膜が積層された状態で各薄膜の膜厚を計測すること。
【解決手段】薄膜検査装置は、第1透明薄膜及び第2透明薄膜の少なくとも一方の膜厚変動に影響を受ける分光反射スペクトルの特徴量の中から少なくとも2つの特徴量を選択し、選択した該特徴量の各々と第1透明薄膜の膜厚及び第2透明薄膜の膜厚とをそれぞれ関連付けた少なくとも2つの特徴量特性が格納された記憶部14と、被検査基板Sに対して透明ガラス基板側から白色光を照射する光照射部11と、被検査基板Sからの反射光を受光する受光部12と、受光された反射光に基づく分光反射スペクトルから記憶部14に格納されている各特徴量の実測値を求め、求めた各特徴量の実測値と記憶部14に格納されている特徴量特性とを用いて、第1透明薄膜及び第2透明薄膜の膜厚をそれぞれ求める演算部15とを備える。
(もっと読む)
車室内状態の認識装置
【課題】シートに着座した乗員の体格をより正確に判定する。
【解決手段】本発明の車室内状態の認識装置は、車室内に赤外線を照射する赤外線照射手段15と、この赤外線照射手段15から赤外線が照射された車室内を撮像する撮像手段16と、この撮像手段16により撮像された画像に基づき所定の情報を認識する画像認識手段18とを備える。上記撮像手段16による撮像対象には、車体に対して移動可能なシート(3)と、該シートに着座した着座乗員(B)とが含まれ、上記画像認識手段18は、上記シート(3)とその着座乗員(B)との外形を画像上で比較することにより、上記着座乗員(B)の体格を判定する
(もっと読む)
製品形状の検査システム
【課題】欠けの位置、形状、またはサイズ等の影響による誤検出を極力排して高精度に欠けを検出することができる製品形状の検査システムを提供する。
【解決手段】検査対象に生じた形状の欠陥を検出するための製品形状の検査システムであって、以下の構成を備える。距離画像撮像手段(距離画像カメラ130):検査対象までの距離情報を画像として表示する距離画像データを得る。高さプロファイル抽出手段:距離画像データに基づいて、検査対象の表面における高さプロファイルを抽出する。差分プロファイル演算手段:前記高さプロファイルと良好な高さプロファイルである基準プロファイルとの差分データを求める。判定手段:前記差分データに基づいて、検査対象の形状に欠陥があるか否かを判定する。
(もっと読む)
エッジ検出装置及びこれを用いた工作機械、エッジ検出方法
【課題】シルエットとして投影できない形状のエッジでも、非接触で、加工途中のワークなどを精度高く、かつ、リアルタイムで輪郭形状を数値的に測定可能とする光学的なエッジ検出装置を提供すること
【解決手段】本発明のエッジ検出装置は、投影光学系の光軸16aと平行な光線を遮光するアンチピンホールフィルタ25を備えた投影光学系と、投影光学系の光軸16aと一定の偏角θをもって配設された光源モジュール11と、撮像素子26と、コンピュータとを備え、光源モジュール11の平行光に照射されたワーク17からの反射光による投影画像を撮像素子で撮像し、エッジ近傍の信号強度を判定し、2本の帯状の高輝度の部分に挟まれた低輝度の線状部分をエッジと判定する。そのため、ワークのエッジを正確に検出でき、これを画像処理により数値処理することでCADやNC制御と連動させることができる。
(もっと読む)
パラメータ決定支援装置およびパラメータ決定支援プログラム
【課題】計測対象物体を撮像して得られる画像データに対して予め定められたパラメータの組を用いた処理を行うことで処理結果を得る処理装置に設定されるパラメータをより迅速かつ容易に決定できるパラメータ決定支援装置およびパラメータ決定支援プログラムを提供する。
【解決手段】試行された複数のパラメータ候補の各々について、その判定結果および統計的出力が一覧表示されることで、ユーザは、最適なパラメータセットを容易に選択することができる。たとえば、誤検出数がゼロである試行番号「2」,「4」,「5」が安定した処理を行なうことのできるといえ、その中でも、試行番号「2」が最も処理時間が短くて済むので、総合的には、試行番号「2」のパラメータセットが最適であると言える。
(もっと読む)
三次元形状特定装置、三次元形状特定方法、三次元形状特定プログラム
【課題】障害物の位置と高さを含む三次元形状を詳細に特定することが可能な三次元形状特定装置、三次元形状特定方法、及び三次元形状特定プログラムを提供する。
【解決手段】移動するカメラの移動前後において画像が撮影される。特徴点抽出部51にて、撮影画像内に含まれる対象物の特徴点が抽出される。次いで特徴点対応付け部52にて、異なる撮影画像の特徴点同士が対応付けられる。次いで高さ判定部55にて、基準平面に対してdα(α=1,2,…,N)離れた位置に仮想的に配置される仮想平面に対する射影変換行列であって、予めカメラの移動パラメータや位置情報に基づいて算出された射影変換行列の関係を満たす特徴点の対応が抽出される。抽出された特徴点の対応にて示される対象物の部位は、仮想平面上に配置していると判断する。次いでグルーピング部56にて、同一仮想平面上に載る特徴点がグルーピングされる。
(もっと読む)
パターン検証方法および半導体装置の製造方法
【課題】パターン形状に起因するパターンの加工不良を正確かつ容易に検証できるパターン検証方法を提供すること。
【解決手段】基板上に生成されるパターン形状43からパターン形状43の輪郭44を抽出する輪郭抽出ステップと、輪郭44上にパターン形状43の検証位置となる評価点p1〜p7を所定の間隔で設定する評価点設定ステップと、評価点p1〜p7における輪郭44上の曲率を算出する曲率算出ステップと、曲率が予め設定された所定の閾値を満たすか否かに基づいて、パターン形状43を検証する検証ステップと、を含む。
(もっと読む)
凹凸文字抽出のための画像処理方法
【課題】上下方向に縦振動をする平面又は曲面上に刻印された凹凸文字をを精度高く読取ることができる凹凸文字抽出のための画像処理方法を提供する。
【解決手段】本発明に係る凹凸文字抽出のための画像処理方法は、凹凸文字が施され且つ該凹凸文字の凹凸方向に沿った振動を起こしている平面又は曲面から、凹凸文字の画像を抽出する画像処理方法であって、前記凹凸文字を含んだ平面又は曲面の3次元データを取得する3次元計測ステップと、取得された前記3次元データから、前記凹凸方向に沿った振動を除去する振動除去ステップと、を有する。
(もっと読む)
円周面の歪検出方法及び装置
【課題】物体における円周面の歪検出を短時間に且つ高い精度で行い得る方法及び装置を提供する。
【解決手段】物体における円周面の歪検出装置であって、前記物体を前記円周面における中心軸線を中心にして回転させる駆動装置1と、円周面を光照射する照射装置2と、該円周面からの反射光強度を測定する測定装置3と、該測定装置によって得られる反射光強度を前記物体の回転位置と関連づけて判別するための制御装置4とを備えた歪検出装置及び該検出装置を用いた検出方法。
(もっと読む)
光散乱計測ターゲット設計の最適化
計測ターゲット設計が、計測ターゲット設計情報、基板情報、プロセス情報および計測システム情報を含む入力を用いて最適化される。測定システムによる測定信号の獲得が、計測ターゲットの1または複数の光学的特徴を生成するために入力を用いてモデル化される。計測システムによりなされた計測ターゲットの測定の予測精度および正確さを決定するために計測アルゴリズムが特徴に適用される。計測ターゲット設計に関する情報の一部が修正され、また、信号のモデル化および計測アルゴリズムが、1または複数の測定の精度および正確さを最適化するために、繰り返される。計測ターゲット設計が、精度および正確さが最適化された後に表示または格納される。 (もっと読む)
マシンビジョンを用いたオブジェクトの3次元アライメントのためのシステムと方法
本発明はモデル化されたオブジェクトまたはシーンの3次元アライメントを決定するためのシステムおよび方法を提供する。校正後、3D(ステレオ)センサスシステムはオブジェクトを観測して、当該オブジェクトを包含するシーンの実行時3D表現を導出する。各ステレオヘッドからの修正画像は、それらのエッジ特徴を強調するために前処理される。次に少なくとも2個(1対)の前処理された修正画像で、所定の特徴を最初の画像上に特定し、次いで同じ特徴を別の画像中に特定することによりステレオマッチングプロセスが同時に実行される。各対のカメラについて3Dポイントが計算されて3Dポイントクラウドが導出される。3Dポイントクラウドは各カメラ対の3Dポイントをワールド校正からワールド3D空間に変換することによって生成される。ポイントクラウドからの3Dデータの量は、より高水準の幾何学形状(HLGS)、たとえば線分を抽出することによって削減される。実行時に検出されたHLGSがモデルのHLGSに対応させられて、候補3D姿勢を生み出す。粗い採点で姿勢の数を減らす。さらに残った候補姿勢は一層精緻なプロセスに入れられる。次にこれらの残った候補姿勢は、たとえば候補姿勢の検出された3Dまたは2Dポイントをより大きいセットの対応する3次元または2次元モデルポイントに適合させることによって検証され、その場合に最も近いマッチが最良の精緻な3次元姿勢である。 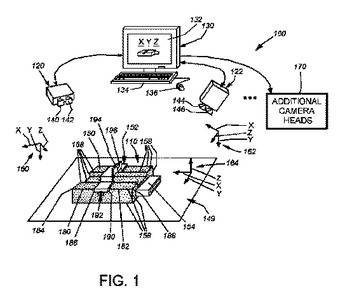 (もっと読む)
(もっと読む)
距離測定器及び物体移動速度測定器
【課題】
カメラで撮影した画像内から人物や車両等の特定のオブジェクトを抽出し、該撮影したカメラと該抽出した特定のオブジェクトとの間の距離、または該抽出した特定のオブジェクトの移動方向及び速度を測定する。
【解決手段】
被写体からの光を所定の焦点距離に結像するレンズ群と、該レンズ群からの入射光を光電変換し画像信号を生成する撮像手段と、該画像信号から予め定められた特徴情報を含むオブジェクトを検出し該オブジェクトの一部またはすべてを含む領域の位置情報を生成するオブジェクト抽出手段と、前記画像信号と該位置情報を基に前記オブジェクトの一部またはすべてを含む領域に合焦させるとともに合焦時の焦点距離情報を算出するオートフォーカス手段と、該オートフォーカス手段からの焦点距離情報を基に前記レンズ群から前記オブジェクト抽出手段により抽出したオブジェクトまでの間の距離を算出する距離算出手段とで構成する。
(もっと読む)
厚み測定装置
【課題】手軽に弾性体の厚みを測定することにより、弾性劣化を容易に測定することができる厚み測定装置を提供すること。
【解決手段】発泡体等から構成される被測定物の測定箇所に当接されるように配設し、該被測定物の厚みを測定するための波動センサー部110を備えた厚み測定装置1において、前記波動センサー部110は、発泡体等の測定箇所の密度変化に応じて反射量が変化する光を出射する発光部112と、発光部112から出射され前記発泡体等により反射した光を受光する受光部114と、を有し、前記発泡体等の厚みと、入射された光(輝度)との関係を特性データとして記憶する特性データ152と、受光部114で受光した光から、前記特性データに基づいて前記被測定物の厚みを算出することを特徴とする。
(もっと読む)
201 - 220 / 511
[ Back to top ]