
Fターム[2F068TT07]の内容
音響的手段による測長装置 (5,715) | その他の技術事項 (109) | 非超音波手段との組み合わせ (73) | 光学的手段(TVカメラ) (26)
Fターム[2F068TT07]に分類される特許
1 - 20 / 26
超音波肉厚測定方法
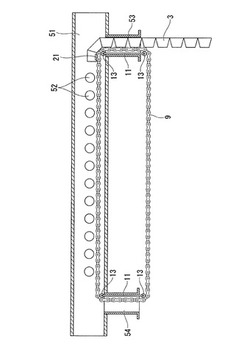
【課題】ガイド管を確実に固定することができ、かつ、管寄せの長手方向に沿う方向の管寄せの位置あわせを容易に行うことができる超音波肉厚測定方法。
【解決手段】管寄せ51に形成された検査孔53から管寄せに接続されたボイラチューブ52内に、ガイド管3を介してケーブルを挿入し、ケーブルに設けられた超音波測定用のセンサプローブによってボイラチューブの肉厚を測定する超音波肉厚測定方法であって、管寄せ51の長手方向に延在するようにレール9を敷設するレール敷設工程と、レール9にガイド管3の先端を固定するガイド管固定工程と、レール9に沿ってガイド管3を移動させるガイド管移動工程と、を含む超音波肉厚測定方法。
(もっと読む)
トレッド厚さ測定方法

【課題】超音波測定によりベルトの素材に関わらずタイヤの最外に位置するベルト表面からトレッド表面までのトレッド厚さを精度良く測定することを可能にするトレッド厚さ測定方法を提供する。
【解決手段】トレッド表面の外形形状を測定する形状測定工程と、形状測定工程により得られた外形形状からタイヤ円周方向に延長する溝の溝底を特定する溝底位置特定工程と、溝底特定工程により特定された溝底と、予め作成されたタイヤ設計データとから溝底からベルト表面までの深さを推定する深さ推定工程と、溝底位置特定工程により特定された溝底から外形形状におけるトレッド表面までの厚さと、深さ推定工程により推定された溝底からベルト表面までの深さとの関係からトレッド表面からベルト表面までの予測厚さを算出する厚さ予測工程と、受信した反射波の増幅率を予測厚さに応じて予め設定された増幅率‐厚さデータマップにより設定する増幅率設定工程とを備える。
(もっと読む)
無人の水中航走体および無人の水中航走体を運転するための方法
【課題】水中の対象物の構造および輪郭を可能な限り迅速にかつ正確に検出することができるようにする。
【解決手段】無人の水中航走体1であって、少なくとも1つのセンサユニット7が設けられており、該センサユニット7によって、水中航走体1の周辺における対象物のセンサ情報8が獲得可能である。少なくとも1つのセンサユニット7が、水中航走体1の長手方向軸線14に対して接線方向の水中航走体1の接線方向12に可動に配置されているかまたは長手方向軸線14に対して平行に延びる軸線に対して接線方向の水中航走体1の接線方向12に可動に配置されていて、センサ情報8が設定可能である位置決め装置13によって接線方向12において位置決め可能である。
(もっと読む)
配管減肉測定装置
【課題】配管の内部に障害物が存在しても、障害物を避けて通過することができ、配管内での姿勢を一定に保持して検査を行うことが可能な配管減肉測定装置を提供する。
【解決手段】内部に障害物11が存在する配管12内に挿入される測定台車13と、測定台車13の前側に設けられた配管12の厚み測定手段14と、測定台車13の後部に配置された進退駆動手段15とを有する配管減肉測定装置10であって、測定台車13は、中央に配置される筒状ケーシング17と、障害物11が存在しない領域では半径方向外側に向けて放射状に拡出し、障害物11が存在する領域では半径方向内側に向けて放射状に縮退する少なくとも3つの平行リンク機構18と、各平行リンク機構18の半径方向外側に設けられた前後対となる車輪19と、各平行リンク機構18を同期して拡出又は縮退するリンク駆動機構20とを有する。
(もっと読む)
配管肉厚測定装置
【課題】 ボイラの過熱器管等のように、密集した状態で配される管群に対して簡便な操作で、迅速かつ適切に配管肉厚測定を行うことができる配管肉厚測定装置を提供する。
【解決手段】 配管肉厚測定装置10Aは、アーム部材11の先端11aに設けられ、アーム部材11の長手方向に直交する横方向に沿って配置する肉厚測定部12および位置決め部材14とを備えている。位置決め部材14は例えばVブロックであり、V字状の当接面141a,141bに配管を当接させた状態では、肉厚測定部12が備える超音波探触子21が、アクチュエータ22の動作によって配管の外面の法線方向に沿って進出し、配管に適切な方向および好適な押圧力で当接する。
(もっと読む)
無接触の管肉厚測定装置及び管肉厚測定
【課題】構造的に簡単な、無接触の管肉厚測定装置を提供する。
【解決手段】少なくとも2つのレーザー超音波測定ヘッド1を、旋回軸を中心に旋回可能な共通の旋回フレーム2に配置し、アブレーティブに励起される超音波によって管の肉厚を測定する。
(もっと読む)
位置検知システムおよび位置検知方法
【課題】船体の外板におけるロボットの位置を精度良く検知できる位置検知技術を提供する。
【解決手段】ロボットの位置検知システムは、船体外板80の異なる位置に取り付けられ船体外板80に伝播させる音波を発信する2つの音源部31、32と、ロボット2Aに設けられ船体外板80を伝播した音波を受信する音波受信部25とを備えている。そして、この位置検知システムでは、各音源部31、32から発信された音波が船体外板80を伝播して音波受信部25で受信されるまでの各伝播時間と、船体外板80における各音源部31、32の位置情報とに基づき、ロボット2Aの位置を検知する。その結果、船体外板80におけるロボット2Aの位置を精度良く検知できる。
(もっと読む)
超音波探傷装置
【課題】 簡易な構造により探触子の位置座標を得ることができ、直感的に試験対象物を走査することができる超音波探傷装置を提供する。
【解決手段】 試験対象物を撮像して画像信号を出力するカメラ16と、試験対象物に超音波を発射し、試験対象物から超音波の反射波を受信し、受信した反射波に基づいて試験対象物の内部の傷の状態を表す探傷信号を出力する探触子11と、カメラから出力される画像信号の中から検出した試験対象物の位置座標を基準として、画像信号の中の探触子の位置座標を検出する座標検出手段20と、座標検出手段が検出した探触子の位置座標と、探触子が検出した探傷信号に基づいて、探傷の程度を可視化するための探傷画像信号を生成し、試験対象物の画像信号と合成して出力する合成手段20をもつ超音波探傷装置。
(もっと読む)
手書き筆跡入力システム
【課題】 従来の手書き筆跡入力システムに於いては、受信部にて検出した超音波信号の振幅が小さい場合などに、到達時刻の計測精度が低下したり、波形データ計測に大量のメモリや高速で高分解能のA/D変換器が必要となり、コスト高になったりなどの欠点があった。
【解決手段】 受信部にピークホールド回路と減算回路とを設け、超音波信号から生成された入力信号とピークホールド回路の出力信号との差分信号が、所定の閾値を超えた時刻を超音波信号の到達した時刻に補正することにより、低コストであって、位置座標の検出にかかる時間も短く、計測精度のよい手書き筆跡入力システムを実現することが出来た。
(もっと読む)
超音波検査の走査計画のためのビジョン・システム
航空機の構成要素における複合材料の分析のためのシステムおよび方法である。構造化光測定を使用して対象物の3次元形状が判定され、次いで、レーザ超音波測定を行うときの走査数を最少にするために3次元形状が分析される。 (もっと読む)
手書き筆跡入力システム
【課題】 従来の複数の電子ペンを用いる手書き筆跡入力システムに於いては、受信機に使用する各電子ペンの識別番号を予め登録しておく必要があり、使用中に予め登録してない電子ペンを追加して使用する場合や予め登録してない電子ペンに変更する場合には、再び受信機に登録しなおす必要があった。また電子ペンには高速に計算処理ができるCPUを使う必要があり、高価になってしまうなどの欠点があった。
【解決手段】 電子ペンに赤外線受信素子を含む赤外線受信部を設けると共に、信号発信部は、赤外線信号の受信に応じて一定期間、赤外線信号及び超音波信号の発信を停止することで、低コストの電子ペンであって、予め受信機に使用する電子ペンの識別番号を登録しておかずとも混信することなく複数の電子ペンを使用できる手書き筆跡入力システムを実現することが出来た。
(もっと読む)
駐車支援装置
【課題】駐車車両に隣接する駐車空間の向きを精度良く推定して、駐車空間に駐車する際に変化させるべき車両の角度を決定することができる駐車支援装置の提供。
【解決手段】本発明は、駐車車両に隣接した駐車空間への縦列駐車を支援する駐車支援装置10A,10Bにおいて、自車の進行方向で見て前記駐車空間に対して手前側に存在する駐車車両の側方を通過する際に、該駐車車両の側面の複数点に対する自車の距離を表すデータを取得する距離データ取得手段70と、前記距離データ取得手段により取得された距離データに基づいて、前記駐車車両の側面に対する自車の進行方向のなす角度を、傾き角度として算出する傾き角度算出手段12A,12Bと、前記傾き角度算出手段により算出される傾き角度に基づいて、前記駐車空間に縦列駐車する際に変化させるべき車両の角度を決定することを特徴とする。
(もっと読む)
配管内位置検知装置
【課題】水で満たされた配管内で、音響の送受信位置に関する情報がなくても、音速を正確に与え、結果として、検査装置の位置を正確に検知することができる配管内位置検知装置を提供することにある。
【解決手段】検査用ROV11に搭載した音波発信器32から発した水中音響47は、PLR配管7内の水中を伝播して支援用ROV13に搭載した音波受信器39で受信できる。検査用ROV11と支援用ROV13のPLR配管7内の道程距離、即ち支援用ROV13と検査用ROV11との間の相対距離は、水中音響47の送受信タイミングの差と、水中音速とから算出する。
(もっと読む)
超音波多重エコー計測装置
【課題】被測定物の板厚や材料特性値の計測を非接触かつ非破壊で精度よく行なうことができる超音波多重エコー計測装置を提供する。
【解決手段】レーザ超音波法を利用した超音波多重エコー計測装置20において、被測定物24の材料に照射することで材料中に超音波を発生せしめるための送信レーザ光のスポット口径aと被測定物24の材料を伝播した超音波を検出する受信レーザ光のスポット口径bの少なくとも一方を、被測定物の板厚d、利用する超音波波長λ0との関係から調整する機能を備えることにより、超音波多重エコー信号の減衰を極小とする。
(もっと読む)
画像読取装置
【課題】本発明は、温度検知手段を設けることなく、安価な超音波方式の重送検知装置を備える画像読取装置を提供する。
【解決手段】画像読取装置100は、重送検知装置として超音波センサ20及び超音波発信素子21と、ランプ12とフレーム201を有する液晶表示部200とを備えている。液晶表示部200は、超音波センサ20の近傍に配置され、フレーム201がランプ12から放出される熱により超音波センサ20を温めるように配置されている。
(もっと読む)
シート状部材重送検知装置
【課題】シート状部材搬送保護用のエンベロープにシート状部材を入れて搬送する場合においても、正確にシート状部材の重送を検知できるシート状部材重送検知装置を提供する。
【解決手段】シート状部材の搬送路に配置され、前記搬送路を通過するシート状部材の重なりを検出する第一の検出手段B02,B03と、前記搬送路を挟んで対向するように配置された発光手段B04と受光手段B05を有し、前記発光手段から照射されシート状部材を透過した光を前記受光手段で検出し受光量に応じた信号を出力する第二の検出手段と、前記第一の検出手段がシート状部材の重なりを検出し、かつ、前記第二の検出手段の出力信号が設定された重送判定閾値以下の場合に重送と判別する判別手段B06と、を備えたシート状部材重送検知装置。
(もっと読む)
切削ブレードの振幅計測装置
【課題】超音波振動子に印加された交流電力の周波数に対応した超音波振動による切削ブレードの振幅を正確に検出することができる切削ブレードの振幅計測装置を提供する。
【解決手段】切削ブレード45が取付けられた回転スピンドル42に配設された超音波振動手段に所定周波数の交流電力を印加することにより超音波振動が付与せしめられる切削ブレードの振幅計測装置であって、切削ブレード45の振幅を発光手段112と受光手段113とで光学的に検出する振幅検出手段110と、振幅検出手段から出力された振幅信号のうち設定された周波数領域の振幅信号のみを通過させる周波数可変バンドパスフィルター120と、周波数可変バンドパスフィルターの周波数領域を設定し制御するとともに周波数可変バンドパスフィルターからの振幅信号に基いて切削ブレードの振幅を演算する制御手段130とを具備する。
(もっと読む)
手書き筆跡入力システム
【課題】 手書き筆跡入力装置に於いて、ペンの筆記使用時における筆記角度による位置座標データの誤差を補正する為には、1つの電子ペンに超音波発生素子を2つ設ける必要がある。このため、電子ペンの大型化や、電力消費が大きくなることによる連続使用時間の短縮などといった問題があった。
【解決手段】 本発明は、電子ペンの超音波発生素子から発信された超音波の各超音波受信部への到達時間により計算された複数の位置座標データ間の差から、電子ペンの筆記使用時における筆記角度を推計し、その筆記角度により、電子ペンのペン先筆記部の位置座標データを補正することで、この問題を解決した。
(もっと読む)
距離測定システム及び距離測定方法
【課題】送信装置と受信装置間の距離の測定精度の低下を抑制できる距離測定システム及び距離測定方法を提供する。
【解決手段】受信装置に、赤外線の受信を検出してから超音波の受信を検出するまでの時間である到達時間と該到達時間に対応する超音波の直接波の受信時における所要受信強度との関係を示すテーブルを備えておく。送信装置から赤外線と超音波を同時に発信し、受信装置は、赤外線及び超音波を受信すると、該超音波の受信強度とテーブルから取得したその到達時間に対応する所要受信強度とを比較し、超音波の受信強度がテーブルから取得した到達時間に対応する所要受信強度よりも大きいとき、その到達時間の値を基に送信装置との距離を算出する。
(もっと読む)
プロジェクタ並びにプロジェクタの付属装置
【課題】従来の電子黒板では、信号処理器を取り付けたホワイトボードでしか平面上の座標が取れず、信号処理器を持たないホワイトボードでは座標取得ができない。また、画面4隅を指定するなど座標の初期化が必要である問題点があった。
【解決手段】信号処理器をプロジェクタに設け、またプロジェクタからスクリーンまでの距離を取得する手段をプロジェクタに設ける。これによって、信号処理器を持たないホワイトボードでも座標取得ができる。また、画面4隅を指定するなど座標の初期化が必要ない。
(もっと読む)
1 - 20 / 26
[ Back to top ]