
Fターム[2F069AA06]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122) | 変位;移動量 (182)
Fターム[2F069AA06]に分類される特許
41 - 60 / 182
エンジンマウントの変位量計測方法
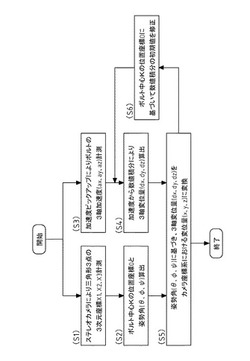
【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの3軸回転量を高精度に算出することができる、エンジンマウントの変位量計測方法を提供する。
【解決手段】ボルト12の一端に配設した検出体34の3次元座標をステレオカメラ33で計測することにより、ボルト12の中心Kの位置座標O及びボルト12の姿勢角を算出するカメラ計測工程と、ボルト12の一端に配設した加速度ピックアップ31で計測したボルト12の3軸加速度を二階積分することにより、ボルト12の3軸変位量を算出する加速度検出具計測工程と、ボルト12の姿勢角に基づいてボルト12の3軸変位量をカメラ座標系における変位量に変換する変位量変換工程と、ボルト12の中心Kの位置座標Oに基づいて加速度検出具計測工程において行う二階積分の初期値を修正する座標修正工程とを備える。
(もっと読む)
ディスクブレーキのピストン変位量測定方法およびその方法に使用する装置

【課題】ロータの両側にピストンを有するピストン対向型ディスクブレーキであっても、正確なピストン変位量を測定可能とする装置を提供する。
【解決手段】ディスクロータを跨いで配置するディスクブレーキのキャリパに、対向する少なくとも1個のシリンダを設け、前記各シリンダに挿入したピストンで摩擦パッドを両側から押圧して前記ディスクロータに摺接しブレーキを働かせるようにしたディスクブレーキにおいて、前記ピストンまたはディスクロータの一方にギャップセンサを設け、そのセンサによりディスクロータまたはピストンとの距離を計測し、ピストンの軸方向の変位量を測定することを特徴とするピストン変位測定方法である。
(もっと読む)
運動推定装置及びプログラム
【課題】簡易な構成で、安定して移動体の運動を精度よく推定することができるようにする。
【解決手段】画像撮像部12によって異なるタイミングで複数の画像を撮像し、運動推定候補算出部20によって、撮像した複数の画像に基づいて、自車両の運動推定候補を複数算出する。また、ジャイロセンサ14によって、自車両のヨー角速度を計測する。信頼度判定部22によって、算出された複数の運動推定候補の各々について、信頼度を判定する。運動検証部26によって、ジャイロセンサ14によって計測されたヨー角速度、及び信頼度判定部22によって判定された複数の運動推定候補の各々の信頼度に基づいて、複数の運動推定候補のうちの何れか1つを、自車両の運動の推定結果として選択する。
(もっと読む)
目標物の位置の時間変化計測方法及び計測装置
【課題】 画像処理によりマークの位置を検出する方法は、処理に時間を要するため、高周波の位置変動を捉えることができない。
【解決手段】 (a)移動する目標物を撮像すると共に、該目標物の加速度を測定する。(b)前記目標物を撮像して得られた画像データに基づいて、該画像データが取得された時刻における該目標物の位置を求める。(c)前記目標物の加速度に基づいて得られる位置情報と、前記画像データが取得された時刻における該目標物の位置とに基づいて、該目標物の位置の時間変化を求める。
(もっと読む)
測定器
【課題】セッティング時の使い勝手を向上させることができるとともに、測定値の信頼性を維持しつつ、有効測定範囲を最大限使用可能な測定器を提供する。
【解決手段】本体と、本体に対して移動可能に構成されたスタイラスと、本体に対するスタイラスの変位量を検出するエンコーダ12と、エンコーダ12により検出された変位量から測定値を演算する演算部13と、演算部13が演算した測定値を表示する表示部14と、演算部に指令を与える操作部15,16と、スタイラスの移動ストロークの下限値よりも大きく、かつ、上限値よりも小さい有効測定範囲を記憶した記憶部17を備える。演算部13は、エンコーダ12により検出された変位量が記憶部17に記憶された有効測定範囲内であるか否かを判定し、その判定結果を表示部に表示する。
(もっと読む)
軌道位置データ付与システム及び軌道位置データ付与方法
【課題】軌道上を走行する車両に設置されたセンサから時系列的に出力される検査値データを軌道位置データと対応付けるのに際して、少ない処理で簡単に行うことができるようにする。
【解決手段】検査値データと同期して、車両上に設置された角速度センサによってヨー角速度を表す角速度データを順次取得して検査値データと共に時系列的に保存し、前記保存した角速度データの中で処理するべき範囲である処理区間を必要に応じて決定し、処理区間における角速度データと軌道管理図の曲線線形図とを比較することにより、処理区間における角速度データと軌道管理図の軌道位置データとの対応付けを行い、軌道位置データと対応付けられた角速度データに基づき、該角速度データと同期する検査値データを該軌道位置データと対応付ける。
(もっと読む)
加工装置、および、加工具と被加工物の距離補正方法
【課題】回転刃の刃先と被加工物の高さ方向の距離を正確に補正する。
【解決手段】ルータビット43と、多軸ロボット3と、接触式変位計7と、レーザ変位計8と、高さ補正部とを有する。多軸ロボット3は、ルータビット43を軸回転させ、被加工物100に対して移動させる。接触式変位計7は、多軸ロボット3がルータビット43の刃先を変位計測面7Aに上から押し当てたときに生じる変位を計測する。レーザ変位計8、変位計測面7Aと被加工物100の相対的な高さを計測する。高さ補正部は、接触式変位計7とレーザ変位計8の計測結果に基づいて、ルータビット43の刃先と被加工物100との高さを補正する。
(もっと読む)
路面平坦性測定装置
【課題】 IRI算出において予め定められた測定区間長内で試験車の走行速度が変化してもそれに対応することを容易にすると共に、時々刻々の速度変化毎に速度補正ができるようにして、より精度の良い測定を可能にすること。
【解決手段】 本発明の路面平坦性測定装置は、試験車の車軸側(またはサスペンション下側)に位置する加速度計1と、サスペンションが支持する車体側(またはサスペンション上側)に位置する加速度計2と、試験車の走行速度を測定するためのGPSレシーバ3と、測定データを収集して一時記録する収録装置4と、測定データからIRI(国際ラフネス指数)を算出するパーソナルコンピュータ(以下、「PC」と略称する)5と、を備える。PC5は、各機器の制御とIRIの算出とを各々別タスクで制御し、タスク間の測定データの受け渡しはファイル及び共通(グローバル)変数で行う。
(もっと読む)
光学素子位置調整装置、光学系、露光装置及びデバイスの製造方法
【課題】光学素子の波面収差を好適に維持できる光学素子位置調整装置、光学系、露光装置及びデバイスの製造方法を提供する。
【解決手段】光学素子位置調整装置は、ミラー33,35を保持し、且つ鏡筒29に対してミラー33,35を6自由度方向に移動させるべく駆動する駆動部を有するミラー保持装置と、第6ミラー35のZ軸方向における位置を計測するための第6軸方向計測器61Fと、第4ミラー33のY軸方向における位置を計測するための鏡筒半径計測器62及び間隔計測器63と、各計測器61F,62,63からの計測結果に基づきミラー保持装置を制御する制御装置とを備えている。
(もっと読む)
情報処理装置、情報処理方法、情報処理プログラム、間仕切りパネル
【課題】
本発明では、他の情報処理装置との位置関係を把握した上で、所定の位置関係にある他の情報処理装置と、高度なセキュリティ機能を有する情報処理システムを自立的に構築する情報処理装置等を提供することを目的とする。
【解決手段】
本発明に係る情報処理装置は、距離計測用センサを用いて計測した距離に基づいて、当該情報処理装置の位置を基準とした他の情報処理装置の位置を検出する位置検出手段と、位置検出手段による検出結果に基づいて、当該情報処理装置と他の情報処理装置とが所定の位置関係にあるか否かを判定する位置判定手段と、対象物検出用センサを用いて、対象物を検出する対象物検出手段と、位置判定手段により所定の位置関係にあると判定された他の情報処理装置に対して、対象物検出手段により検出された対象物を識別する識別情報を通知する情報通知手段と、を有することを特徴とする。
(もっと読む)
モーショントラッカ装置
【課題】光学マーカーに識別情報を持たせたり、1個1個順番に点灯させたりすることなく、各光学マーカーを確実に識別することができるモーショントラッカ装置を提供する。
【解決手段】 モーショントラッカ装置1であって、対象物10に作用する対象物角速度を短時間で検出する対象物角速度検出センサ4と、対象物10に作用する対象物加速度を短時間で検出する対象物加速度検出センサ5と、第一座標系の角度移動量を算出する第一座標系角度移動量算出部23と、第一座標系の位置移動量を算出する第一座標系位置移動量算出部27と、光学マーカー位置情報、第一座標系の角度移動量及び第一座標系の位置移動量に基づいて、光学マーカーの予想移動位置を推定する光学マーカー推定部26とを備え、光学マーカー位置情報算出部24は、光学マーカーの予想移動位置に基づいて、3個以上の光学マーカー7をそれぞれ識別することを特徴とする。
(もっと読む)
変状計測装置
【課題】従来の光式変位センサや電気式変位センサ(伸縮センサ)を用いて、これらの伸縮計の機構を変えることなく低コストかつ簡便な機構と1台の一軸方向検出変位センサで2区間の変位を計測し、また、少ない台数で多数区間の変位箇所を特定する面的変状計測装置を提供する。
【解決手段】2つの移動杭の変位状態を計測する装置において、固定杭に固定された一軸方向検出変位センサと、同変位センサに繋がれた接続線と同接続線の一端に設けた変位伝達機構と、両端がそれぞれ前記各移動杭に連結され中途が前記の変位伝達機構に揺動もしくは摺動自在に張設され且つ移動杭の変位に追従して非伸縮状態で全体移動自在に張設された計測線とから構成されたことを特徴とする。
(もっと読む)
駐車支援装置
【課題】車輪速センサのパルスから算出した車輪の移動距離の誤差を補正し、自車両の位置を精度良く検出することができる駐車支援装置を提供する。
【解決手段】車輪速センサ2から計測されたパルス数に変換係数を乗ずることで車輪の移動距離を算出する車輪移動距離算出手段1と、車輪移動距離から自車両の位置を演算する自車位置演算手段4と、自車両の位置に基づき各距離センサ1によって得られた距離データの分布を各距離センサ1に対し生成する距離データ分布生成手段5と、各距離センサ1の距離データ分布を照合し、車輪の移動距離の誤差を算出する車輪移動距離誤差算出手段6と、車輪の移動距離の誤差に基づき車輪移動距離算出手段3にて用いられる変換係数を補正する変換係数補正手段7を備えている。
(もっと読む)
関節チェーンの運動を表わす情報決定のための自律的システム及び方法
本発明は、少なくとも2つの固体要素(ES1_1、ES2_1、ES1_2、ES2_2、ES3_2、ES1_3、ES2_3、ES3_3、ES4_3)、及び前記2つの要素をつないでいる少なくとも1つの関節(ART1_1、ART1_2、ART2_2、ART1_3、ART2_3、ART3_3)を備える、関節チェーン(CA_1、CA_2、CA_3)の運動を表わす情報を決定するための自律システムに関する。本システムは、前記関節チェーンの2つの異なる要素上に固定して取り付けられ、行われた測定を伝送するために適する、装置間距離を測定するための、少なくとも2つの装置(DISP1_1、DISP2_1、DISP1_2、DISP2_2、DISP3_2、DISP1_3、DISP2_3、DISP3_3、DISP4_3)を備える。さらに、本システムは、測定装置により供給された少なくとも1つの測定値に基づき、2つの測定器を隔てる少なくとも1つの距離を決定する手段と、装置間距離を測定するための前記装置により伝送された測定値に基づき、前記関節チェーンの運動を表わす情報を計算するのに適する、前記関節チェーンに取り付けられた計算手段(CALC)とを備える。 (もっと読む)
姿勢角検出装置
【課題】取付位置にずれが生じたときにも取付部位の姿勢角を正確に検出することができる姿勢角検出装置を提供する。
【解決手段】人体の部位100の姿勢角を検出する姿勢角検出装置10であって、姿勢角センサ20と、移動量検出手段31、32と演算手段60を備えている。姿勢角センサ20は、人体の部位100の表面に取り付けられ、自己の姿勢角を検出する。移動量検出手段31、32は、取付部位100の表面を移動したときの姿勢角センサ20の初期位置からの移動量を検出する。演算手段60は、検出された姿勢角を検出された移動量に基づいて補正する。
(もっと読む)
変位量検出方法及びそれに用いる装置
【課題】温度環境が変動しても高精度に測定できる変位量検出方法及び装置を提供する。
【解決手段】変位量検出手段によりワークの変位量を検出する方法において、非加熱状態で該変位量検出手段を作動させた後、該変位量検出手段の検出部の温度が所定温度に達するまでに、該ワークの見かけの変位量を検出すると共に、該検出部の温度を検知する動作を複数回行い、該見かけの変位量及び該検出部の温度から、温度変化に伴うワークの見かけの変位量の変化率を算出し、該温度が所定の温度に達した後、ワークの変位量を検出すると共に、該検出部の温度を検知し、該見かけの変位量の変化率から得た補正値を該ワークの該変位量から減算して補正した変位量を出力することを特徴とする。また、変位量検出手段によりワークの変位量を検出する変位量検出装置において、温度検知手段と、記憶手段と、変化率算出手段と、補正変位量出力手段とを備える。
(もっと読む)
ダム堤体の変位計測装置
【課題】ダム堤体の変位を正確に、かつ、低コストに測定することができるダム堤体の変位計測装置を提供する。
【解決手段】ダム堤体の変位計測装置の傾斜計21の測定傾斜角と傾斜計21の周囲の測定温度は記憶部25に記憶される。制御部27は、測定温度から傾斜計21によって測定された傾斜角を補正し、補正された傾斜角から傾斜計21周辺のダム堤体の変位量を産出する。
(もっと読む)
構造物変位推定システム及び構造物変位推定方法
【課題】計測点間隔が大きくても変位量を求めることができる構造物変位推定システム及び構造物変位推定方法を提供する。
【解決手段】まくらぎ5に支持されたレール3の長さ方向に間隔をおいて設置されている計測傾斜角を計測する複数個の傾斜計6と、レール3の計測点間部分における補間傾斜角を推定する演算装置とを有し、演算装置は、レール3上の点の長さ方向の位置を表す位置値を示す位置軸と、レール3の傾斜角を表す傾斜角値を示す傾斜角軸とからなる位置−傾斜角座標において、計測点の位置値と計測傾斜角の傾斜角値とで表される座標計測点を含み、位置値に対応した傾斜角値を与える予備補間関数を求め、計測点間の位置値と補間傾斜角の傾斜計値とで表される、予備補間関数上の暫定点を補正することによって、暫定点に代わる仮想座標計測点を求め、座標計測点及び仮想座標計測点を含み、位置値に対応した傾斜角値を与える本補間関数を求める。
(もっと読む)
構造物変位推定システム及び構造物変位推定方法
【課題】傾斜計間の梁状構造の被支持体の長さ方向に対する被支持体の傾斜角を推定することができる構造物変位推定システム及び構造物変位推定方法を提供する。
【解決手段】まくらぎ(支持体)5に支持され、1本からなる、又は接合されて1本となる梁状構造のレール(被支持体)3の長さ方向に間隔を空けてレール3に沿って設置されている、レール3の長さ方向に対する傾斜角を測定する複数個の傾斜計6と、この傾斜計6から得られる傾斜角から、傾斜計6,6間毎にレール3の長さ方向に沿った位置に対するレール3の傾斜角を推定する関数を与える演算装置7Bとを有することを特徴とする。
(もっと読む)
測定装置
【課題】スケール、スケールベース、及びベースの熱膨張等による伸縮で生じるスケールベースの変形を防いで、スケールによる高精度な変位測定を可能とする。
【解決手段】スケールベース112は、スケール116で測定される測定方向(Y方向)の複数箇所P1、P2、P3でベース110に固定され、該固定される箇所P1、P2、P3間のスケールベース116にスリット114が設けられ、前記スケール116は該スケールベース112の該固定される箇所P1、P2、P3の2箇所以上において該スケールベース112により支持され、且つ、該スケールベース112は、該固定される箇所P1、P2、P3以外の位置において該ベース110との間、及び該支持する箇所以外の位置において該スケール116との間、のそれぞれに空隙S1、S2、S3を有する。
(もっと読む)
41 - 60 / 182
[ Back to top ]