
Fターム[2F069AA06]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122) | 変位;移動量 (182)
Fターム[2F069AA06]に分類される特許
21 - 40 / 182
移動情報検出方法、移動情報検出プログラム、計測装置、光学系、露光装置及びデバイスの製造方法
【課題】位置センサを用いた移動部材の移動情報の検出精度を向上させることができる移動情報検出方法、移動情報検出プログラム、計測装置、光学系、露光装置及びデバイスの製造方法を提供する。
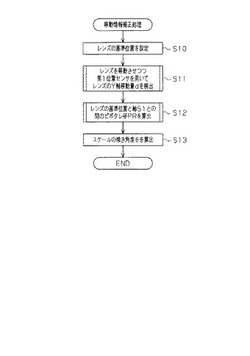
【解決手段】ステップS11では、レンズをZ軸方向及びθx方向に移動させると共に、複数の位置で位置センサを用いてレンズのY軸移動量dを検出させ、さらに、Y軸移動量dを検出したときのレンズのZ軸方向に関する位置及び傾斜角を検出させる。そして、ステップS12,13では、位置センサのスケールの傾き角度θを算出させる。その後、算出した傾き角度θに基づいて、位置センサを用いてレンズのY軸移動量dが補正される。
(もっと読む)
形状測定装置

【課題】被検物の形状測定において、測定プローブと被検物との位置合わせ作業を簡単に
行うことが可能な構成の形状測定装置を提供する。
【解決手段】被検物に対して光プローブ20を相対移動させて、光プローブ20により得
られた情報から被検物の三次元形状を非接触で測定するように構成された形状測定装置に
おいて、光プローブ20を被検物に対して所定の位置となるように移動させる門型構造体
10と、被検物を少なくとも2つの回転軸方向に回転させる支持装置30とを有して構成
される。
(もっと読む)
一体化したターニング・センタを有する非接触検査システム
【課題】ロータの機械加工と非接触検査システムを一体化する。
【解決手段】非接触検査システム110は、制動表面を指す非接触センサ(112−1、112−2)の1つ以上の対及びディスクの外径を指す非接触センサを有する。非接触センサは、誘導性センサ、容量性プローブ及び/又はレーザ・センサである。システムは、制動表面102、104厚さ変動、横振れ、平坦さ、平行性及び直径等の種々の特徴及び特性を測定する。ディスクが指定速度で回転する間に又はディスクが停止している間に測定を行う。非接触センサ(112−1、112−2)の対は、センサ又は校正された表面から、その指した表面までの距離を連続的に測定する。他の2つのセンサ(115及び/又は117)は、センサ又は校正された表面から、その指した面までの距離を連続的に測定する。
(もっと読む)
温度変化による誤差を補正して固体の体積変化率及び/又は長さ変化率を測定する方法
【課題】測定時の環境温度が異なった場合や任意の線膨張係数の値を持つ標準器を用いた場合などに、それら影響を取り除き、適切な環境温度における測定結果を得ることができる固体の体積変化率及び/又は長さ変化率を測定する方法を提供する。
【解決手段】標準器と固体の供試体の温度を測定し、特定の式に基づいて、標準器と固体の供試体の温度変化による誤差をそれぞれ算定して、温度変化による固体の体積変化率及び/又は長さ変化率の誤差を補正する固体の体積変化率及び/又は長さ変化率を測定する方法を構成とする。
(もっと読む)
軌道検測のための検出器ユニット
【課題】
光学的変位センサを搭載する検出器ユニットを堅牢な構造にしなくても台車に取付けることが可能で一般の営業車両にも取付けることができるように小型軽量化した軌道検測のための検出器ユニットを提供することにある。
【解決手段】
この発明は、レールの横断方向、すなわち、台車の横梁方向に沿って設けた収納ケースに内装する内装フレームを水平板フレームとこれから起立する垂直板フレームで構成し、光学的変位センサは垂直板フレームの両端にそれぞれ設ける。内装フレームの両端を緩衝部材を介して収納ケースに取付け、質量が大きいジャイロを水平板フレームの中央部付近に搭載する。
(もっと読む)
動き検出装置および方法
【課題】 動き検出装置および方法を提供する。
【解決手段】 1つ以上の第1回転角測定センサを用いて第1角を測定し、1つ以上の第2回転角測定センサおよび前記1つ以上の第1回転角測定センサと相違する1つ以上の2軸の角速度センサを用いて第2角を推定し、1つ以上の第3回転角測定センサおよび前記1つ以上の2軸の角速度センサを用いて前記2軸のうちのいずれか1つである第3角を推定する動き検出装置を提供する。
(もっと読む)
ケーブルの移動解析装置
【課題】ケーブルの移動力を簡易かつ短時間に求めることができるケーブルの移動解析装置を提供すること。
【解決手段】車両が上部を通過する地盤内の管路に敷設されたケーブルの水平方向の移動を解析する装置であって、車両が通過する際の地盤の振動解析を行って車両の移動に伴うケーブル近傍部分の土壌粒子の水平速度を求め、該水平速度と車両の水平方向位置との関係をもとに、車両の進行方向に向かって、車両の進行方向に速度成分を有する第1前進区間と車両の進行方向とは逆方向に速度成分を有する後進区間と再び車両の進行方向に速度成分を有する第2前進区間との各移動距離を少なくとも算出する振動解析部21と、各区間毎に、ケーブルの単位長さあたりの重量と管路に対するケーブルの摩擦係数と各区間の移動距離とを乗算した区間移動力を求め、各区間移動力をベクトル演算した値をケーブルにかかる移動力として算出する移動力解析部22と、を備える。
(もっと読む)
ホーミング処理のためのガントリーステージ直交性誤差測定方法および誤差補正方法
【課題】本発明の課題は、ガントリーステージ直交性誤差に関連する問題を解決することである。
【解決手段】本発明によるホーミング処理のためのガントリーステージ直交性誤差測定方法および誤差補正方法は、直交性に構造的に一致するガントリーステージの現在位置のエンコーダ値を解読して記憶する工程と、ガントリーステージを低速で駆動している状態で、ガントリーステージのマスター軸およびスレーブ軸上にそれぞれ設定されたホーミング処理用のセンサまたはエンコーダのインデックス信号をモニタする工程と、インデックス信号が検出された場合、認知された位置のマスター軸またはスレーブ軸のリニアエンコーダ値を解読する工程とを備えていることを特徴とする。
(もっと読む)
携帯端末
【課題】 空間的に離間した複数の撮影点で同じ対象物を被写体として撮影して撮影点間の相対位置を判定することができる携帯端末を提供する。
【解決手段】 被写体を撮影して静止画像を生成するカメラ16と、カメラ16の光軸の向き及び光軸を中心とする傾きを検出する姿勢検出部32と、静止画像から特徴点を抽出する特徴点抽出部24aと、静止画像内の特徴点に対応する被写体上の点及び当該静止画像の撮影が行われた撮影点間の距離を測定する距離測定部25と、第1撮影点で撮影された第1画像内の特徴点について測定された距離、第2撮影点で撮影された第2画像内の上記特徴点について測定された距離、並びに、第1撮影点及び第2撮影点でのカメラ16の向き及び傾きの各検出結果に基づいて、第1撮影点に対する第2撮影点の相対位置を判定する位置判定部26により構成される。
(もっと読む)
車両のホイールアライメント調整方法
【課題】専用の評価装置を設けることなく、アライメント調整装置でスラスト角を調整できる車両のホイールアライメント調整方法を提供すること。
【解決手段】本発明の車両のホイールアライメント調整方法は、車両の左右前後の車輪の位置を検出するステップと、予め設定されている装置中心線MCに平行な方向への車輪13、14のずれ量を測定するセットバック量測定ステップと、左右の車輪13、14の装置中心線MCに直交する方向の距離を測定するトレッド量測定ステップと、測定ステップにより測定したセットバック量Sおよび後軸トレッド量TBに基づいて、スラスト角θを算出するステップと、を備える。
(もっと読む)
金属板の面歪みの評価方法、金属板の面歪みの評価値演算装置及びプログラム
【課題】評価対象の金属板の面歪みを直接的、定量的に評価できるようにする。
【解決手段】測定装置200により取得された金属板1の表面形状の計測値を入力とし、補間部102において、測定装置200による計測値を直交格子状に補間した上で、ガウス曲率計算部103において、直交格子点上の値、すなわち測定装置200による計測値が直交格子点上にあればその計測値、測定装置200による計測値が直交格子点上になければ補間計算値を用いてガウス曲率を計算する。
(もっと読む)
物理量検出装置、手ぶれ補正装置及びカメラ
【課題】比較的簡単な構成でありながら、重力加速度の影響が補正された物理量を検出可能な物理量検出装置、手ぶれ補正装置及びカメラを提供すること。
【解決手段】物理量検出装置1は、第1の周波数信号906を出力する第1の発振部10、第2の周波数信号908を出力する第2の発振部20、第2の発振部20に対する発振制御電圧904を生成する発振制御部50、第1、第2の周波数信号の位相差を検出して速度検出信号902を生成する速度検出部40、物理量検出信号910を生成する検出信号生成部30を含む。第1、第2の振動子の少なくとも一方は発振周波数が変化する加速度検出素子であり、発振制御部は、制御信号912に基づいて、第2の周波数信号の周波数を第1の周波数信号の周波数と一致させるように発振制御電圧を生成するか保持するかを選択し、検出信号生成部は、保持された発振制御電圧と速度検出信号に基づいて物理量検出信号を生成する。
(もっと読む)
走査運動誤差測定方法
【課題】特別な外部基準を必要としないため簡便、低コスト、迅速、低設置面積といった特徴を持つ走査運動誤差測定方法において、従来、取り除くことのできなかったスピンドル回転誤差の影響を低減できる走査運動誤差測定方法を提供する。
【解決手段】旋盤や円筒研削盤上において作製した加工対象である被加工物5をスピンドル3から取り外すことなくそのまま測定の基準として用いて、被加工物5を搭載したスピンドル3の回転中心軸4に対して工具Tと正対する位置に変位検出器Bを配置し、回転中心軸4に沿ってスライドにより走査しながら得られた変位検出器Bの出力から、回転中心軸4を基準としたスライド走査機構の持つ運動誤差を測定する装置において、回転中心軸4の整数回転分の平均を求めることにより、回転中心軸4の運動誤差の影響を低減する。
(もっと読む)
鋼材の変位表示方法及びシステム
【課題】鋼材の地中変位を、当該鋼材の挿入過程において、正確に把握することができ、しかも、装置コストが嵩まない鋼材の変位表示方法とする。
【解決手段】傾斜計11を用いて地中に挿入された鋼材2の傾斜情報を取得し、この傾斜情報を用いて鋼材2の変位を算出し、この算出変位を表示する方法であって、鋼材2の挿入に先立って、傾斜計11を鋼材先端部2aに固定し、鋼材2の挿入過程において、連続的に又は所定の深度ごとに傾斜情報を取得し、鋼材2の挿入完了後、傾斜計11を、この傾斜計11に取り付けた線材13を地上から引いて回収する。
(もっと読む)
列車位置検出システム
【課題】車上側での簡易且つ高精度の位置検出を実現するとともに、位置検出に要する地上側及び車上側の装置の簡素化を図ること。
【解決手段】走行路3には、深さが異なる3種類のスリット部11A,11B,11Cが形成されたパターンプレート10が配置されている。列車5には、高さ位置が異なることで検出可能なスリット部11の種類が異なる複数の検出器30−1〜30−5が設けられている。そして、車上装置40では、各検出器30による検出信号Fから検出しているスリット部11の種類を判定し、走行路3の特定位置に配置された特定種類のスリット部11の検出によって、列車5が該特定位置に位置していることを検出する。
(もっと読む)
位置測定システム
【課題】簡易な設備構成で、かつ正確に位置情報を補正することが可能な位置測定システムを提供する。
【解決手段】位置測定システム1は、レールの変位を計測する変位センサ34と、位置を計測する距離計31と、データ処理装置4と、を移動体2に搭載している。また、位置測定システム1のデータ処理装置4は、各遊間9の位置情報が登録されている遊間位置管理DB43を備える。データ処理装置4の制御部41は、変位センサ34の計測データ及び距離計31の計測位置データを監視している。制御部41は、変位センサ34の計測データが遊間9に固有の特徴的なデータを示した際における計測位置データまたはその近傍にある遊間位置情報を遊間位置管理DB43から抽出し、予測値として保持する。そして、距離計31による計測位置データと、抽出した予測値とを照合し、一致しない場合は、計測した距離を予測値(登録されている遊間位置情報)に補正する。
(もっと読む)
測定スタンドおよびその電気制御方法
【課題】 特に薄層の厚さ測定に適した、測定用プローブを保持する測定スタンドおよびその制御方法の提供。
【解決手段】 測定用プローブ(26)を保持する保持器(24)を担持する変位部材(23)と、その変位部材を測定用プローブとともに上下に駆動する駆動ユニット(35)との間に、フリーホイール機構(51)を介在させ、測定用プローブ(26)または保持器(24)が測定対象(14)に接触すると、駆動ユニット(35)による駆動が変位部材(23)から切り離され且つスイッチング・デバイス(58)がスイッチング信号を制御ユニットへ送出する。
(もっと読む)
相対変位計測方法及び相対変位計測装置
【課題】蒸気発生器の伝熱管と振止部材との相対変位を計測できる相対変位計測方法を提供することにある。
【解決手段】伝熱管と振止部材との間で発生する相対変位を検出する相対変位計測方法であって、伝熱管に配置された距離測定手段により、振止部材に配置されたターゲットとの距離を測定する測定ステップと、測定ステップにより測定した間隔に基づいて、伝熱管と振止部材との相対変位を算出する算出ステップとを有し、振動時の伝熱管の所定位置と振止部材の所定位置との相対変位を計測することで上記課題を解決する。
(もっと読む)
繋ぎ目検出装置及び測長装置
【課題】連続帯状体の表面に検出部を変位可能に接触配置し、変位センサー部は変位信号を出力し、A/D変換部が変位データを出力し、しきい値演算部は変位データを基にしきい値を求め、比較判定部は変位データがしきい値よりも大であるとき判定信号を出力し、繋ぎ目信号出力部は判定信号が出力されたとき繋ぎ目信号を出力し、繋ぎ目検出精度を高めることができる。
【解決手段】繋ぎ目Jに凸部を有してなる連続帯状体Wの表面に接触して変位可能な検出部1を設け、繋ぎ目検出装置において、変位信号を出力する変位センサー部5と、変位信号をデジタル数値化して変位データDを出力するA/D変換部6と、しきい値Tを求めるしきい値演算部7と、変位データがしきい値よりも大であるとき判定信号を出力する比較判定部8と、判定信号が出力されたとき繋ぎ目信号を出力する繋ぎ目信号出力部9とを備えてなる。
(もっと読む)
エンジンマウント変位測定方法
【課題】計測器を用いて車両に対するエンジンマウントの変位を迅速且つ正確に測定できるエンジンマウント変位測定方法を提供する。
【解決手段】車両1を定盤11の上に配置して、車両1の車軸方向に基づいて車両基準の座標系P(x、y、z)を決定し、車両基準の座標系P(x、y、z)における計測器21、51の原点位置と、計測器基準の座標系Q(X、Y、Z)におけるエンジンマウントの三次元位置とを用いて所定の座標変換行列式により、車両基準の座標系P(x、y、z)におけるエンジンマウントの三次元位置を算出する。これにより、車両基準の座標系P(x、y、z)におけるエンジンマウントの変位を迅速且つ正確に測定することができる。
(もっと読む)
21 - 40 / 182
[ Back to top ]