
Fターム[2F069EE00]の内容
測定手段を特定しない測長装置 (16,435) | 補正;補償 (408)
Fターム[2F069EE00]の下位に属するFターム
Fターム[2F069EE00]に分類される特許
21 - 40 / 53
長距離構造物の位置管理装置、その位置管理システムおよびその位置管理プログラム
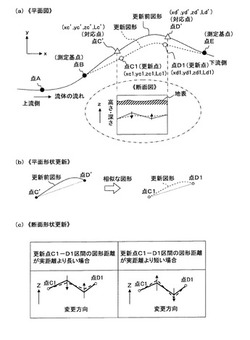
【課題】パイプラインのような長距離構造物の保守管理を行うための技術を提供する。
【解決手段】パイプが連結されて構成されるパイプラインにおいて、パイプが掘り起こされて、そのパイプの両端の位置(更新点C1,D1)が計測される。そして、図5(a)に示すように、計測された位置が計測前の位置(対応点C’,D’)と異なっていたとする。この場合、図5(b)に示すように、まず、平面形状については、更新前図形の形状の特徴を保持したまま、相似な図形となるようにして、更新図形を作成する。次に、更新点C1−D1間の実測距離が更新図形に反映されるようにするために、図5(c)に示すように、深さ・高さ方向を変更して、図形上の距離と実測距離とが整合される。そのため、腐食等の位置を、パイプラインの開始点からの累積距離によって管理することが可能となる。
(もっと読む)
リソグラフィ装置及び測定方法

【課題】レベルセンサのプロセス依存型オフセット誤差を正確に修正する費用有効性の高い方法を提供する。
【解決手段】基板W(たとえば基板を支持するための基板テーブルを備えたリソグラフィ装置内の基板)を露光する方法には、第1及び第2のセンサ10,11を使用して少なくとも1つの基板Wの一部の第1及び第2の高さ測定を実行するステップと、測値の差に基づいてオフセット誤差マップを作成し、且つ、記憶するステップと、第1のセンサ10を使用して高さ測定を実行することによって、前記基板W(又は前記部分と類似した処理が施された他の基板)の複数の部分のハイト・マップを作成して記憶し、且つ、オフセット誤差マップによってこのハイト・マップを修正するステップと、前記基板W(又は他の基板)を露光するステップが含まれている。
(もっと読む)
産業機械
【課題】目標位置の変化速度、及び補正に起因する追従誤差を抑制することができる制御装置を備える産業機械の提供。
【解決手段】三次元測定機1は、被測定物を測定するための測定子を移動させる移動機構2と、移動機構2を制御することで測定子の位置を位置指令値に追従させる制御装置3とを備える。制御装置3は、移動機構2にて移動される測定子の位置を検出する位置検出部31と、位置検出部31による検出位置を補正する補正部32と、補正部32にて補正された検出位置の位置指令値に対する偏差に基づいて、測定子の位置を制御する位置制御部33と、位値指令値に基づいて、移動機構2をフィードフォワード制御する位置フィードフォワード制御部34と、補正部32による検出位置の補正量に基づいて、移動機構2をフィードフォワード制御する補正量フィードフォワード制御部35とを備える。
(もっと読む)
三次元計測システム及び三次元計測方法
【課題】ワークを高精度に三次元計測すること。
【解決手段】三次元計測システム1は、非接触式の三次元計測器4をロボット2により移動させてワーク5の形状を三次元に計測する。予めロボット座標データに基づき制御されるロボット2の挙動をロボット計測装置14により実測し、そのときのロボット実測データとロボット座標データとをデータ処理装置12が比較してロボット座標データを補正するための補正モデルを算出して備えておく。そして、ワーク5の計測時には、ロボット座標データに基づき制御されるロボット2と三次元計測器4を同期させてワーク5の形状を三次元に計測し、そのときのロボット座標データを補正モデルにより補正し、その補正されたロボット座標データと三次元計測器4による三次元計測座標データとをデータ処理装置12で統合して任意座標により出力装置13へ出力する。
(もっと読む)
加工装置、および、加工具と被加工物の距離補正方法
【課題】回転刃の刃先と被加工物の高さ方向の距離を正確に補正する。
【解決手段】ルータビット43と、多軸ロボット3と、接触式変位計7と、レーザ変位計8と、高さ補正部とを有する。多軸ロボット3は、ルータビット43を軸回転させ、被加工物100に対して移動させる。接触式変位計7は、多軸ロボット3がルータビット43の刃先を変位計測面7Aに上から押し当てたときに生じる変位を計測する。レーザ変位計8、変位計測面7Aと被加工物100の相対的な高さを計測する。高さ補正部は、接触式変位計7とレーザ変位計8の計測結果に基づいて、ルータビット43の刃先と被加工物100との高さを補正する。
(もっと読む)
形状測定装置
【課題】被測定物の3次元形状を規定した測定点群から精度よく簡便に形状測定する形状測定装置を提供する。
【解決手段】被測定物の形状を規定した3次元の測定点群データ2が3次元測定装置8から出力されると、形状測定装置1の断面抽出部3が、測定点群データ2から所定の切断面に含まれる測定点を抽出した断面点群データ4を生成する。測長領域設定部5は断面点群データ4に測長領域を設定する。入出力装置7を介して、ユーザから測長領域の断面点群が指定されると、測長部6がその断面点群を用いて被測定物の外側寸法、内側寸法、2点間寸法、角度等を測定する。
(もっと読む)
軌道狂い検測装置および軌道狂い検測方法
【課題】演算負荷が増大せず、且つ低速域でも所望の波長帯域が得られる軌道狂い検測技術を提供すること。
【解決手段】車両の水平方向の加速度に、所望の軌道狂い弦長、車両の走行速度およびサンプリング時間に応じたデータ数ずつ遅らせた各地点での車両の水平方向の加速度を順次加算して車両の水平方向の速度とする。続いて、演算後の車両の水平方向の速度に、所望の軌道狂い弦長、車両の走行速度およびサンプリング時間に応じたデータ数ずつ遅らせた各地点での車両の水平方向の速度を順次加算して車両の水平方向の位置とし、サンプリング時間に基づく係数を乗算した後に別途測定した加速度計とレールとの間の相対変位を加算して通り狂い量とする。同様に、車両の水平方向の加速度から高低狂い量を算出する。また、等時間サンプリングの代わりに等距離サンプリングでも本方法で軌道狂いを計算できる。
(もっと読む)
軌道狂い検測装置
【課題】波形ひずみを生じることなく、様々な弦長の正矢波形をリアルタイムに出力される軌道狂い検測技術を提供すること。
【解決手段】車両の水平方向の加速度を2階積分することで通り狂い量としての車両の水平方向の位置を算出する際に、車両の走行速度に応じてベッセルフィルタのゲインおよび遮断周波数を調整し、調整後のベッセルフィルタは、車両の水平方向の加速度の位相特性を変化させないので、波形ひずみを生じることがない。また、車両の鉛直方向の加速度を2階積分することで高低狂い量としての車両の鉛直方向の位置を算出する際に、車両の走行速度に応じてベッセルフィルタのゲインおよび遮断周波数を調整し、調整後のベッセルフィルタは、車両の鉛直方向の加速度の位相特性を変化させないので、波形ひずみを生じることがなく、様々な弦長の正矢波形をリアルタイムに出力することができる。
(もっと読む)
研削装置
【課題】被加工物の被研削面に傷を付けることなく所定の厚さに研削することができる研削装置を提供する。
【解決手段】チャックテーブルに保持された被加工物の上面を研削するものであって、制御手段は、接触式の厚み計測器によって被加工物の加工前の厚み(T1)を計測する第1の加工前の厚み計測工程と、非接触式の厚み計測器によって被加工物の加工前の厚み(T2)を計測する第2の加工前の厚み計測工程と、被加工物の加工前の厚み(T1)と(T2)に基づいて非接触式の厚み計測器による計測値を補正する補正値(T1/T2)を求める補正値演算工程と該非接触式の厚み計測器を作動してチャックテーブルの保持面に保持された被加工物の厚みを計測しつつ研削手段を作動して被加工物を研削する研削工程と、非接触式の厚み計測器によって計測された被加工物の厚み(T0)に補正値(T1/T2)を乗算した値が所定値に達したら研削手段による研削を終了する研削終了工程を実行する。
(もっと読む)
センサユニット
【課題】姿勢等の高精度のセンシングが可能なセンサユニットを提供する。
【解決手段】姿勢及び動きを検出するジャイロユニット6、視野内の物体の相対姿勢及びその動きを検出する人工網膜IC7、周辺に存する音源の存在を検出する音響センサ8、D−GPS9、及びこれらのセンサの動作を制御するコントローラ5を可搬性の筐体に収容してセンサユニットを構成する。コントローラ5は、各センサ3〜9による検出結果を実時間で受け入れ、これらの検出結果を所定のメモリ領域上に形成された情報空間内に更新自在に記録し、記録された検出結果をもとに、情報空間内において自己に対する上記物体の位置、方向及び動き、つまり筐体と物体のどちらが動いたを特定するようにした。
(もっと読む)
膜厚測定装置、膜厚測定方法および記録媒体
【課題】渦電流損失測定センサ、膜厚測定装置、膜厚測定方法およびコンピュータ読取り可能な記録媒体を提供する。
【解決手段】高周波磁界を励磁して導電性膜9に渦電流を励起させるコイルと、渦電流に起因する渦電流損失の影響を受けた高周波電流を出力するコイルとを有する渦電流損失測定センサ20と、コイルが出力する高周波電流から渦電流損失測定センサ20のインピーダンスの変化、高周波電流の電流値の変化または高周波電流の位相の変化を測定して渦電流損失量を測定するインピーダンスアナライザ48と、導電性膜9と渦電流損失測定センサとの距離を測定する光学式変位センサ32と、インピーダンスアナライザ48と光学式変位センサ32の各測定結果に基づいて導電性膜9の膜厚を算出する膜厚演算部54を含む制御コンピュータ42と、を備える膜厚測定装置1。
(もっと読む)
真円度測定装置、真円度測定方法、及び真円度測定プログラム
【課題】偏心位置が回転軸から大きく離れている場合であっても、高精度で偏心位置が求められる真円度測定装置、真円度測定方法、及び真円度測定プログラムを提供する。
【解決手段】真円度測定装置は、回転駆動手段によるワーク4の回転角、及びその回転角に対応する回転軸からワーク4の表面までの距離を測定値Pとして取得する測定値取得部を備える。また、真円度測定装置は、中心位置(a,b)を変動可能なパラメータとする円形状の補正円CLを設定し、測定値Pから補正円CLの中心位置に向かう方向の、各測定値Pと補正円CLとの間の距離の2乗和が、最小値となるように、補正円CLの中心位置及び半径値を計算し、その計算した補正円CLの中心位置(a,b)を偏心位置とする偏心計算部を備える。
(もっと読む)
センサのミスアラインメント検知および測定システム
ミスアラインメント検知センサアセンブリを提供し、これは、第1の軸に沿う検知方向を有する前方監視センサと、第1の軸と所定の関係にある第2の軸に沿う加速度を検知する慣性センサとを備えている。ミスアラインメント検知システムは、ミスアラインメント検知センサアセンブリと、信号処理システムとを用いて、第1の軸とセンサアセンブリの前方動作方向との間のミスアラインメント角度を計算する。前方監視センサアセンブリの角度ミスアラインメントを検知する方法についても開示し、本方法では、前方監視センサアセンブリの検知の軸と所定の関係を有する軸に沿う加速度を測定し、測定した加速度を所定の閾値と比較する。 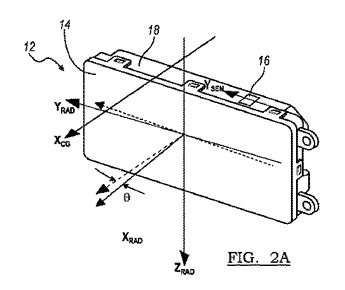 (もっと読む)
(もっと読む)
ステアリング角の絶対値を測定するための光学式ステアリング角センサ
本発明は、ステアリングホイールが複数回転する場合でもステアリング角の絶対値を定める光学式ステアリング角センサに関するものであり、ステーター、バーコードを有するローター、及び評価電子機器を備える。本発明では、ローター(1,13)は、回転数検出のためにウォーム状のトラック溝部(5)を備え、このトラック溝部(5)に対応してステーター(2)に駆動体突起(6)を備え、この駆動体突起(6)は、トラック溝部(5)に係合し、回転可能となるようにベアリング(9,15)に配置され、駆動体突起(6)とともに回転可能な磁石(8)の保持のためのホルダ(7)を備え、この駆動体突起(6)に対応して評価回路に設けられた固定状のホールセンサ(11)を有する。 (もっと読む)
ホース検尺装置
【課題】簡単な構造でホース取り出し長さを誤差なく正確に測定する。
【解決手段】ホース取り出し開始時にセンサー1で最先端のマークMを読み取ってからホースHを取り出す。取り出されたホースHの長さが測長手段2で測定されると共に、予め設定された所望のホース切断長さに対する測長手段2からの測定データが表示部4に表示され、表示を確認しながらホースHの取り出し、所望ホース切断長さに到達した時点で、ホースHの末端側のマークMをセンサー1で読み取る。データ処理部3が、測長手段2からの測定データに基づきホース取り出し終了位置のマークMを検索し、ホース取り出し開始時とホース取り出し終了時に読み込んだ両マークMからの長さデータの差を求め、長さデータの差と、所望のホース切断長さとを比較し、両者が一致した時のみ、測定完了信号を出力して作業者に通知される。
(もっと読む)
舵角を求める方法および装置
車体(6)に可回転に支承されたステアリングホイール(58)の舵角(δLRW)を求める方法であって、ジョイント(8)を間に挟んで車体(6)に接続されたホイール(14)はステアリングホイール(58)により車体(6)に対して旋回させることができ、または旋回させられ、車体(6)は舵角(δLRW)に応じたジョイント(8)の傾斜(ω)を検出する角度測定装置を有しており、ステアリングホイール(58)の車体(6)に対する捩れ角(δSTS)が舵角センサ(61)により求められる形式の方法において、ステアリングホイール(58)によって許容されうる舵角(δLRW)の範囲に対してステアリング方向ごとに複数のセクター(S)を割り当て、前記傾斜に基づいて前記セクター(S)のうちの1つを求め、前記捩れ角(δSTS)と求められたセクター(S)とに基づいて舵角(δLRW)を求める。  (もっと読む)
(もっと読む)
直交座標運動機構の補正係数決定方法および測定データの収集方法
【課題】各軸リニアリティと直角度の補正係数を、少ない測定回数で一括推定することを可能にする。
【解決手段】三軸XYZで規定される直方体の対角4方向及び三軸方向の計7方向について長さが既知である長さ基準器を用いた長さ測定を行って測定値データMを取得する(S1)。測定データMから各方向についての誤差εを求める(S2)。求められた各方向についての誤差から最小二乗法により各軸のリニアリティおよび各軸間の直角度の補正係数を一括推定する(S3)。
(もっと読む)
ヨーレートセンサの補正装置
【課題】簡易に且つ精度良くヨーレートセンサの出力値を補正することができるヨーレートセンサの補正装置を提供する。
【解決手段】本発明は、車両のヨーレートを検出するヨーレートセンサの出力値を補正するヨーレートセンサの補正装置であって、車両のタイヤの磨耗度を検出するタイヤ磨耗度検出手段(4,6,8)と、このタイヤ磨耗度検出手段により検出されたタイヤの磨耗度に基づきヨーレートセンサの出力値の補正係数を算出する補正係数算出手段(10)と、この補正係数算出手段により算出された補正係数を用いてヨーレートセンサの出力値を補正する補正手段(10)と、を有する。
(もっと読む)
紙葉類の厚さ検知装置および紙葉類の厚さ検知方法
【課題】紙葉類全面の厚さを搬送状態の影響を受けることなく常に安定かつ高精度に検知することができる紙葉類の厚さ検知装置を提供する。
【解決手段】有価証券等の紙葉類を搬送しながら検査したり仕分けしたりする紙葉類処理装置等において、搬送される紙葉類の厚さを検知する紙葉類の厚さ検知装置において、紙葉類の全面にわたって厚さを検知するために、複数の厚さ検知器を紙葉類の搬送路に対し搬送方向と直交方向に並設する場合、紙葉類の搬送状態(スキューやスライド等)に対する不安定さに対して、両外側の厚さ検知器の各出力を相補的に用いることによって高精度な処理を実現する。
(もっと読む)
ホーム離れ計測方法およびその装置
【課題】駅のプラットホームの建築限界の計測を迅速に且つ高精度に実行すること。
【解決手段】駅のプラットホーム200に沿って進行する車両本体101の側端とホーム側端縁Pとの間の距離情報Aを検出する手段と、この検出動作とほぼ同一のタイミングで作動して車両101が進行する軌道300の中心位置Oを検出する手段と、この計測された軌道中心位置Oと当該軌道300上を進行する車両本体101の中心位置との間の位置ずれΔSLを検出する手段とを備え、これら計測された所定の情報等に基づいて当該車両100が走行する軌道300の中心位置Oからプラットホームの側端縁Pまでの水平距離等をホーム建築限界情報として算定するようにした。
(もっと読む)
21 - 40 / 53
[ Back to top ]