
Fターム[2F069GG59]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 検出器を複数個利用するもの (279) | 異種の検出器を用いるもの (175)
Fターム[2F069GG59]の下位に属するFターム
粗、密の (1)
Fターム[2F069GG59]に分類される特許
161 - 174 / 174
接触式プローブおよび形状測定装置

【課題】コンパクトな磁気回路によって、被測定物に接触するプローブの自重をキャンセルする力とプローブの変位によって変化するばね要素としての力を発生させる。
【解決手段】箱形状のヨーク7の方形の開口部に、プローブシャフト4と一体である鉄心9および永久磁石8を配設して、一定の曲率を有するヨーク7の内面に永久磁石8を対向させ、両者のすきまを流れる磁束により、形状測定装置の計測軸15に対するプローブ移動方向であるZ方向に変化するばね成分を含む力を発生させる。ヨーク7が箱形状であるためにヨーク7内に磁気回路がシールドされ、近傍に鉄系材料の部材が配設されても磁束が乱されることはない。
(もっと読む)
測定制御系における制御回路の制御パラメータ設定方法および測定装置

【課題】 測定制御系におけるハンチングの発生を的確に防止するゲインを高精度に設定でき、測定を安定かつ迅速に行うことを可能にする、制御回路のゲイン設定方法を提供すること。
【解決手段】 N個のゲインGiを順次制御回路23に仮設定し、スタイラス131を被測定物Wに接触させて仮測定を行う。このときセンサ検出回路21から出力されるセンサ検出信号を、フィルタ31によって濾波し、制御回路23を含む閉ループLに生じるハンチングの周波数に対応する周波数成分のみを取り出す。この周波数成分の大きさSiを基準値S0と比較し、Sj<S0となって閉ループLにハンチングを生じさせないGjを抽出し、さらに、測定の速応性の向上等の観点から各Gjのうち最大のものを制御回路23に設定する。したがって、この設定ゲインによれば、測定を安定にかつ迅速に行うことができる。
(もっと読む)
路面断面プロファイルの測定方法
【課題】 測定路面の両端の一定長さが平坦でなくても測定路面の全範囲において簡易かつ精度良くプロファイル測定が可能な路面断面プロファイルの測定方法を提供する。
【解決手段】 測定ブロック10の長さの異なる第1及び第2連結棒14,15が真直状態での第1ローラ11及び第3ローラ13の中心間寸法を基準距離として、基準距離を複数点に分割した複数の計測位置を決める。測定ブロックが路面の縦方向に進行し、第3ローラが計測位置を順次移動する毎に、各計測位置にて第1及び第2連結棒のなす連結角をロータリエンコーダにより検出する。連結角検出値から路面のプロファイルを推定する。さらに、路面のプロファイルを評価する評価関数を設定し、この評価関数を共役勾配法等の演算手法を用いて最小化することにより、路面全体の精密な断面プロファイルを得ることができる。
(もっと読む)
コンベアベルトのモニタリングシステム
【課題】 コンベヤベルトの縦裂きだけでなく、縦裂きの予兆としての異常な高温等も検出して、縦裂きを未然に防ぐ機能も併せもつコンベヤベルトのモニタリングシステムを提供する。
【解決手段】 トランスポンダ4と、コンベヤベルト1の温度または圧力を計測する計測手段2,3とを、コンベヤベルト1の表層部に、所定の間隔を開けて連続的に設置し、自己の識別情報、および計測値を外部から非接触的にエネルギーを得て発信するようにするとともに、コンベアベルト1から所定の距離を離間して所定の固定位置に設置され、トランスポンダ4および計測手段に対して電磁エネルギーを発するとともに、これらトランスポンダ4および計測手段2,3から、自己の識別情報および計測値を載せた電波を受信する送受信装置5を設置する。
(もっと読む)
形状測定装置、形状測定方法、形状解析装置、形状解析プログラム、記録媒体
【課題】 基準平面を要することなく、測定対象面の形状を簡便かつ高精度に解析する形状測定装置を提供する。
【解決手段】測定部200は、直定規を被測定面に対してギャップをもって配置し、直定規と被測定面との距離を所定ピッチで測長する。そして、直定規を移動させて被測定面の略全面にわたって被測定面と直定規との距離を測定する。直定規形状記憶部320は、参照直線から直定規までの残差を直定規の形状示数として記憶している。平面形状仮設定部330は、参照平面から被測定面までの残差を被測定面の形状示数として被測定面の形状を仮設定する。連立式導出部340は、測定部200で得られた測定値は、直定規の参照直線と被測定面の参照平面との距離に直定規の形状示数と被測定面の形状示数とを加えた値に等しいとして、連立式を導出する。連立式演算部は、導出された連立式を解く。
(もっと読む)
形状測定装置とその測定圧制御方法
【課題】 形状測定装置におけるスタイラスの測定圧を任意の値に容易かつ正確に設定でき、さらに測定速度や傾斜角によるフォーカスサーボの追従遅れを小さくし、測定圧の変化の小さい測定を実現する。
【解決手段】 測定圧目標値設定手段45と、フォーカス誤差目標値生成手段46とを備え、フォーカス制御OFF時のフォーカス誤差信号と測定圧の目標値からフォーカス誤差信号の目標値を設定した後、フォーカス制御をONすることにより、フォーカス制御OFF時の対物レンズと基準ミラー面の距離を変えずに測定圧を変更できるようにした。
(もっと読む)
路面データに基づく車軸挙動の算出方法
【課題】 路面データに基づいて車両の挙動を3次元的なうねりとして算出することができ、この車両の挙動を、路面の快適性や安全性を対象とした道路管理に役立てることのできる路面データに基づく車軸挙動の算出方法を提供する。
【解決手段】 車両が道路と接する4点の路面データを抽出し、この路面データから前車軸15と後車軸14がなす角度θを道路の長手方向へ連続的に求めることにより、車軸挙動を算出する。
(もっと読む)
電子距離測定装置
本発明は、携帯使用が簡便なレーザ及び超音波を利用した電子距離測定装置に関するものである。本発明によれば、超音波センサーで一定の高さを測定し、一定の高さでレーザポインタを回転して測定しようとする目標物にレーザビームを照射し、レーザポインタの回転角度に相当する抵抗値によりレーザビームが指示している距離を正確に測定することができる。  (もっと読む)
(もっと読む)
炉管検査用2Dおよび3D表示システム及び方法
炉から収集した検査データを表示するシステムおよび方法を開示する。システムは検査データ(112)を格納する記憶装置(106)を備える。また、システムは、検査データ(112)を炉の物理的ジオメトリと相関させるように、複数のデータマーカで検査データ(112)を分割するようプログラムされるコンピュータを備える。各データマーカは、(曲管、外部の隆起した表面、クロスオーバ配管、サーマルウェル、溶接部、フランジ、スケジュールの変化、および/または直径の変化といった)炉の物理的特徴の位置を識別する。また、好適には、コンピュータ(102)は、分割した検査データの表示を生成するようプログラムされ、表示は炉のチューブセグメントの2次元または3次元表示である。そして、この表示を使用して、炉内の問題領域を視覚的に検出してもよい。システムおよび関連方法の様々な典型的な実施形態が提供される。 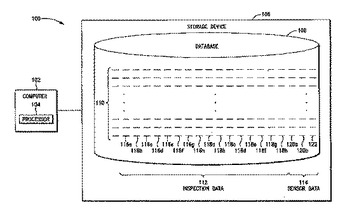 (もっと読む)
(もっと読む)
座標測定装置及び測定物の測定方法
本発明はX線源(10)及びX線を検出する少なくとも1個のX線センサ(7)からなる第1の感知装置としてのX線感知装置及び測定物に対して座標測定装置のx、y及びz方向に位置決めすることができる第2の感知装置、例えば触覚式及び/又は光学式感知装置(8、11;9)を有する、測定物(3)の測定のための座標測定装置(110)に関する。大きなサイズの測定物も問題なく測定できるように、X線感知装置(7、10)が第2の感知装置(8,11;9)に対応して座標測定装置(10)に位置決めされることを提案する。 (もっと読む)
ワークピースの座標を確定するための方法
本発明は、ワークピース(9)に対して不動に位置決めされている第一座標系を固定すること、 ワークピース(9)の第一座標を、第一座標測定装置(3)を使用することにより測定すること、 ワークピース(9)の第二座標を、第二座標測定装置(5)を使用することにより測定すること、そして 第一座標と第二座標から、共通の座標組を、ワークピース(9)に不動に位置決めされた座標系に対する第一座標系においてあるいは第二座標系において作ることを特徴とするワークピース(9)の座標を確定するための方法に関する。特に多数のワークピース(9)の座標はワークピース(9)の製造工程および/または加工工程の最中および/または後に確定することができる。さらに本発明はワークピース(9)が両座標測定装置(3,5)を用いた測定の間に位置および/または姿勢が変化する場合にも関する。 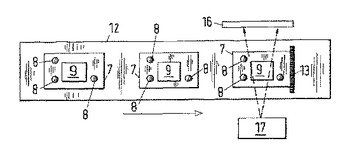 (もっと読む)
(もっと読む)
増分測定および車輪の差速の測定によるステアリングホイールの絶対角位置の決定
自動車のシャーシに対してその自動車のステアリングホイール(1)の絶対角位置θを決定するためのシステムは、ステアリングホイールの相対角位置δをインクリメンタルに測定するための装置と、同一軸に取り付けられた車輪の差速ΔV/Vを測定するための装置(2)と、期間tにおいて角位置と差速をサンプリングするための処理装置(8)を備える。前記装置は、tn瞬間毎に、差速ΔV/Vに従う絶対角位置θ(tn)の推定値θ*(tn)と、角位置θ*(tn)とδ(ti)の間の平均差変位(tn)を決定するのに適した演算手段を備える。ここでiは0からnまでの範囲の変数であり、絶対角位置θ(tn)は平均差変位(tn)と角位置δ(tn)の和である。 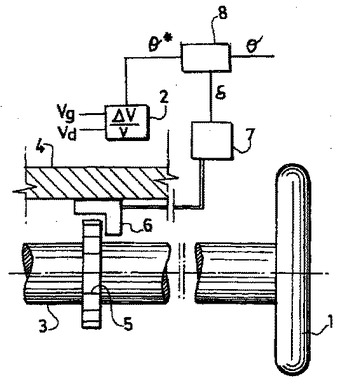 (もっと読む)
(もっと読む)
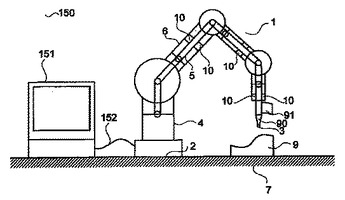
外骨格を有するCMMアーム
ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
 (もっと読む)
(もっと読む)
先行車追従装置
【課題】 先行車追従制御を解除したときに無用な接近警報が発せられるのを防止する。
【解決手段】 先行車追従制御の解除操作がなされても、所定の追従制御終了条件を満たすまで先行車追従制御を継続する。
(もっと読む)
161 - 174 / 174
[ Back to top ]