
Fターム[2F069GG59]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 検出器を複数個利用するもの (279) | 異種の検出器を用いるもの (175)
Fターム[2F069GG59]の下位に属するFターム
粗、密の (1)
Fターム[2F069GG59]に分類される特許
41 - 60 / 174
携帯端末
【課題】 空間的に離間した複数の撮影点で同じ対象物を被写体として撮影して撮影点間の相対位置を判定することができる携帯端末を提供する。
【解決手段】 被写体を撮影して静止画像を生成するカメラ16と、カメラ16の光軸の向き及び光軸を中心とする傾きを検出する姿勢検出部32と、静止画像から特徴点を抽出する特徴点抽出部24aと、静止画像内の特徴点に対応する被写体上の点及び当該静止画像の撮影が行われた撮影点間の距離を測定する距離測定部25と、第1撮影点で撮影された第1画像内の特徴点について測定された距離、第2撮影点で撮影された第2画像内の上記特徴点について測定された距離、並びに、第1撮影点及び第2撮影点でのカメラ16の向き及び傾きの各検出結果に基づいて、第1撮影点に対する第2撮影点の相対位置を判定する位置判定部26により構成される。
(もっと読む)
地図画像統合データベース生成システム及び地図画像統合データベース生成プログラム

【課題】移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる撮影対象位置特定装置、地図画像統合データベース生成装置及び撮影対象位置特定プログラムを提供する。
【解決手段】撮影装置10が撮影対象を撮影すると、制御装置16は、この画像情報とともに、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データと撮影装置10の撮影方向の方位角及び仰俯角を取得する。また、上記シャッターに同期あるいは非同期で、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する。次に、制御装置16は、上記取得した、距離データ、方位角及び仰俯角のデータ及び座標情報のデータに基づいて、撮影対象の座標情報を演算する。また、撮影対象の画像情報及びその座標情報は、互いに関連付けて出力する。
(もっと読む)
車両位置演算装置及び車両位置演算方法
【課題】低コスト化を実現できる車両位置演算装置を提供する。
【解決手段】複数車線道路のうち、一の車線を走行する自車両の位置を計測する自車両位置計測手段と、複数車線道路のうち、他の車線を走行する他車両を検出するセンサ11と、センサ11の検出信号に基づき、自車両に対する他車両の方位を演算する他車両方位演算手段と、一の車線と他の車線との間隔を特定する車線間隔特定手段と、自車両の位置、他車両の方位及び間隔に基づいて、他車両の位置を演算する他車両位置演算手段を有する。
(もっと読む)
形状測定装置
【課題】凹状のゲージを用いた形状測定装置の校正の精度の低下を防止する。
【解決手段】形状測定装置のステージの上面に設けられているゲージは、形状測定装置の校正に用いる凹球面状の凹部と、凹部の底から垂直に突出するように設けられている送風部材52により構成される。送風部材52の送風部52Aの下面には、下面の外周に沿って、送風口61−1乃至61−nが所定の間隔で配置されている。形状測定装置の電源が投入されている間、常にこの送風口61−1乃至61−nから凹部の表面に向かって風が吹き出され、凹部の表面の埃などの異物が吹き飛ばされる。本発明は、例えば、被検物の3次元形状を測定する形状測定装置に適用できる。
(もっと読む)
位置決定システム
本発明は、オブジェクト(2)の位置を決定するための位置決定システム(201)に関する。第一位置検出ユニット(205)が、送受信ユニット(203、214、216、217)によってオブジェクト(2)と基準位置に対して知られている転送位置との間で転送される放射に基づいて、オブジェクト(2)の第一の位置を検出する。第二位置検出ユニット(35)が、オブジェクト(2)の加速度および決定された前記第一の位置に基づいて第二の位置を検出する。出力ユニット(12)が、第一の位置および第二の位置の少なくとも一つを出力する。放射の転送が遮られても、第二の位置が出力ユニットによって出力されることができる。さらに、第一の位置が、第二の位置を決定するまたは第二の位置を更新するための初期値として使用されることができる。これはオブジェクトの位置決定の品質を改善する。 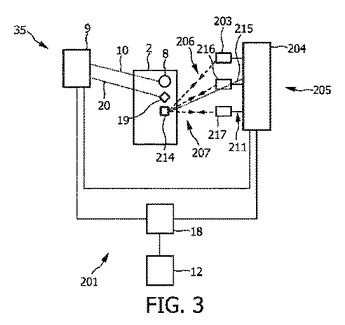 (もっと読む)
(もっと読む)
位置測定システム
【課題】簡易な設備構成で、かつ正確に位置情報を補正することが可能な位置測定システムを提供する。
【解決手段】位置測定システム1は、レールの変位を計測する変位センサ34と、位置を計測する距離計31と、データ処理装置4と、を移動体2に搭載している。また、位置測定システム1のデータ処理装置4は、各遊間9の位置情報が登録されている遊間位置管理DB43を備える。データ処理装置4の制御部41は、変位センサ34の計測データ及び距離計31の計測位置データを監視している。制御部41は、変位センサ34の計測データが遊間9に固有の特徴的なデータを示した際における計測位置データまたはその近傍にある遊間位置情報を遊間位置管理DB43から抽出し、予測値として保持する。そして、距離計31による計測位置データと、抽出した予測値とを照合し、一致しない場合は、計測した距離を予測値(登録されている遊間位置情報)に補正する。
(もっと読む)
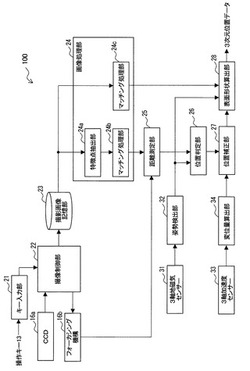
作業装置
【課題】移動機構部の先端に着脱可能なヘッド部を、空間内の目標位置に高精度に位置決めすることができる作業装置を提供する。
【解決手段】形状測定装置(作業装置)100は、形状センサ部17が内蔵されたプローブ(ヘッド部)12と、所定の空間内でプローブ12を移動させるアーム部(移動機構部)11に、このプローブ12を取り付け可能な取付部16と、空間内における所定の目標位置にプローブ12を位置決めする空間位置決定部30と、を有する。
(もっと読む)
エンジンマウントの変位量計測方法
【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの3軸回転量を高精度に算出することができる、エンジンマウントの変位量計測方法を提供する。
【解決手段】ボルト12の一端に配設した検出体34の3次元座標をステレオカメラ33で計測することにより、ボルト12の中心Kの位置座標O及びボルト12の姿勢角を算出するカメラ計測工程と、ボルト12の一端に配設した加速度ピックアップ31で計測したボルト12の3軸加速度を二階積分することにより、ボルト12の3軸変位量を算出する加速度検出具計測工程と、ボルト12の姿勢角に基づいてボルト12の3軸変位量をカメラ座標系における変位量に変換する変位量変換工程と、ボルト12の中心Kの位置座標Oに基づいて加速度検出具計測工程において行う二階積分の初期値を修正する座標修正工程とを備える。
(もっと読む)
傾き調整方法および傾き調整装置並びにその傾き調整方法において調整されるデバイス
【課題】対向配置された対象物同士の相対的な傾きをを高精度にかつ容易に調整することができる傾き調整の技術を提供することを目的とする。
【解決手段】基板55には第1検出部である電極が形成され、基板56には第2検出部である電極が基板55の電極と対を構成する位置に形成されている。そして、基板55および基板56をステージ部15の保持部29およびヘッド部39の保持部44にそれぞれ保持し、基板55および基板56の電極の対の間の静電容量を検出部50により検出する。そして、検出された静電容量が所定の値になるように、X−Yテーブル制御部52によってX−Yステージ機構11を移動させ、基板55および基板56の相対的な傾きを調整する。
(もっと読む)
形状測定装置
【課題】複数の測定手段を備える形状測定装置において、各測定手段の測定範囲を広くする。
【解決手段】形状測定装置は、レーザプローブ17、画像プローブ18、タッチプローブ19の3種類のプローブを備えている。回転軸移動部13Bは、傾斜軸A1回りに回転自在に傾斜軸支持部13Aに支持されており、回転軸移動部13Bを傾斜軸A1回りに傾斜させることにより、回転テーブル13Cに設置されている被検物2を、各プローブに対して傾斜させることができる。各プローブは、各プローブの図内の左側面が、傾斜軸A1に対して略平行になるように配置されている。本発明は、例えば、形状測定装置に適用できる。
(もっと読む)
レーザスキャナを伴う関節式測定アーム
【課題】レーザスキャナを最適に配置し、スキャナの精度を確保する。
【解決手段】座標測定機器は、第1の端10と、第2の端50と、それらの間の複数の継ぎ合わせアームセグメントと、を有する関節付きアーム20を含む。各アームセグメントは、少なくとも1つの回転軸を定める。レーザスキャナアセンブリは、アームの第2の端に結合され、関節付きアームの最後の回転軸を中心に回転可能である。レーザスキャナアセンブリは、レーザと画像センサとを含む。レーザは、最後の回転軸L1を挟んで画像センサの反対側に位置決めされる。
(もっと読む)
バンク角制限装置
【課題】車両の挙動量が大きく変化する場合、あるいは、カーブが逆バンクである場合に、推定バンク角を制限して、該推定バンク角の値が不安定に陥らないようにする。
【解決手段】バンク角制限装置10Aは、ローパスフィルタ16を備えるローパスフィルタ部12と、車両の挙動量が所定の閾値よりも大きいか否かを判定する車両挙動判定部14とを有し、ローパスフィルタ部12は、前記挙動量が前記閾値よりも大きいと車両挙動判定部14が判定したときに、前記車両に搭載されたバンク角推定装置が推定した路面の推定バンク角をローパスフィルタ16を介して出力し、一方で、前記挙動量が前記閾値以下であると車両挙動判定部14が判定したときに、前記推定バンク角を直接出力する。
(もっと読む)
真直度測定方法及び真直度測定装置
【課題】 3個の変位計のゼロ点調整を高精度に行うことなく、測定対象物の表面プロファイルを算出することができる真直度測定方法を提供する。
【解決手段】 第1の方向に並び、相対位置が固定された3個の変位計と、測定対象物との一方(可動物)を他方(固定物)に対して第1の方向に移動させながら、3個の変位計から、それぞれ測定対象物の表面において第1の方向に延在する測定対象線に沿って並ぶ3つの被測定点までの距離を測定する。3個の変位計の測定結果に基づいて、可動物に対する相対位置が固定された基準点の軌跡である倣い曲線のプロファイルを算出する。倣い曲線の算出されたプロファイルの2次成分を、事前に測定されている倣い曲線のプロファイルの2次成分に基づいて補正する。補正された倣い曲線のプロファイルに基づいて、測定対象物の表面のプロファイルを算出する。
(もっと読む)
締付け位置検出装置
【課題】本発明は、複数の締付け位置がどのような場所であってもネジ締めが行われている締付け位置の検出を可能にすることを目的とする。
【解決手段】本発明は、基準位置34からの三次元位置が予め求められている複数の締付け位置で作業者が手持ちの締付け工具22によりネジ締めを行う際、基準位置34に対する締付け工具22の三次元位置に基づいてネジ締めが行われている締付け位置を特定する締付け位置検出装置であって、基準位置34と締付け工具22とをつなぐ変形自在な帯板状のテープ部材32と、テープ部材32の長さ方向に並んでそのテープ部材32の複数箇所に設けられており、複数箇所のねじれと曲がりとを検出する光ファイバーセンサ31と、複数箇所の光ファイバーセンサ31からの信号に基づくテープ部材32の全体形状から基準位置に対する締付け工具22の三次元位置を演算する演算部34,36とを有する。
(もっと読む)
ローラ形状測定装置及びそれを用いたクリアランス調整方法
【課題】ローラ面に養生フィルムを被覆したままでローラ形状を測定できる装置を提供すると共に、その装置を使用してオフラインでダミーによるクリアランス調整を行うことにより、ローラ面を傷つけることなく迅速にクリアランス調整を行うことができる。
【解決手段】直径が1m以上の冷却ローラ14のローラ面に樹脂製の養生フィルム30を被覆したままで該冷却ローラの形状を測定するローラ形状測定装置40は、金属のみに反応することによりローラ面までの距離を測定する渦電流式の変位計42と、変位計42をスライドバー44にスライド自在に支持して冷却ローラ14の幅方向に移動させる移動手段46と、変位計42での測定値とローラ面までの実測距離との関係を予め求めた検量線データを有し、変位計42で測定した測定値を検量線データに基づいて補正する補正手段と、を備える。そして、このロール形状測定装置40でオンライン測定したローラ形状結果に基づいて、冷却ローラ14と遮風板22とのクリアランス調整をオフラインで行う。
(もっと読む)
3次元形状測定システムおよび強度評価システム
【課題】被測定対象物の周囲に障害物がある場合においても正確に3次元形状を測定することのできる3次元形状測定システムおよび測定された3次元形状によって容易に強度を評価することのできる評価強度評価システムを得ることにある。
【解決手段】被測定対象物の3次元表面形状を測定する表面形状測定装置1と、被測定対象物の3次元内面形状を測定する内面形状測定装置2と、被測定対象物の構造材内部の状態を測定する非破壊測定装置3と、この表面形状測定装置、内面形状測定装置、非破壊測定装置によって計測された3次元点群データを入力合成する点群データ変換入力合成装置4と、この点群データ変換入力合成装置によって合成処理した点群データから3次元形状を作成する3次元形状変換処理装置5を有することを特徴とする。
(もっと読む)
路面平坦性測定装置
【課題】 IRI算出において予め定められた測定区間長内で試験車の走行速度が変化してもそれに対応することを容易にすると共に、時々刻々の速度変化毎に速度補正ができるようにして、より精度の良い測定を可能にすること。
【解決手段】 本発明の路面平坦性測定装置は、試験車の車軸側(またはサスペンション下側)に位置する加速度計1と、サスペンションが支持する車体側(またはサスペンション上側)に位置する加速度計2と、試験車の走行速度を測定するためのGPSレシーバ3と、測定データを収集して一時記録する収録装置4と、測定データからIRI(国際ラフネス指数)を算出するパーソナルコンピュータ(以下、「PC」と略称する)5と、を備える。PC5は、各機器の制御とIRIの算出とを各々別タスクで制御し、タスク間の測定データの受け渡しはファイル及び共通(グローバル)変数で行う。
(もっと読む)
操舵角検出装置
【課題】始動後に速やかに操舵角を得ることができる操舵角検出装置を提供することを目的とする。
【解決手段】車両の車輪を転舵するハンドルの操舵角を検出する操舵角検出装置において、ハンドルが操舵角ゼロの中点位置及び360度毎の位置のZ相に到達した場合にこれを検出する舵角センサ5と、車輪の回転量を検出する車輪速センサ8とを設け、走行開始時において舵角センサ5に基づいてハンドルのZ相を検出した場合に、エンジン停止時において記憶された停止時操舵角に基づいて操舵角を設定するレベル1補正と、前記レベル1補正の補正結果にかかわらず、極低車速において車輪速センサ8の検出結果に基づいてハンドルの操舵角を補正するレベル2A補正、レベル2B補正と、通常車速直進走行時において車輪速センサ8の検出結果に基づいてハンドルの操舵角を補正するレベル3補正とを備えたことを特徴とする。
(もっと読む)
一軸コンバインドプラント及びこの一軸コンバインドプラントの起動方法
【課題】本発明は、クラッチ嵌合時の2つの軸の軸ずれを測定する軸ずれ測定装置及びこの軸ずれ測定装置を備えた一軸コンバインドプラントを提供することを目的とする。
【解決手段】制御装置10において、ガスタービン3の軸3aと蒸気タービン5の軸5aとの軸ずれ量を測定し、測定した軸ずれ量に応じて蒸気タービン5の回転速度の昇速率及びヒートソーク時間を設定し、クラッチ7が軸3a,5aを結合するときの軸ずれ量が許容範囲内に収まるようにする。
(もっと読む)
保管装置及び同保管装置を備えた計測装置
【課題】オイルミストや塵などの付着から不使用時にある検出手段を保護して測定精度の悪化を防止する保管装置を提供すること。
【解決手段】被検物Mの形状情報を採取するための検出手段(非接触センサ20a、タッチプローブ20b)をその不使用時に保管する保管装置であって、前記不使用時の検出手段をその周囲の雰囲気から隔てる保護手段(プローブボックス30,エアーポンプ40)と、保護手段に供給されるクリーンエアーの浄化を行う集塵手段44を備える。
(もっと読む)
41 - 60 / 174
[ Back to top ]