
Fターム[2F069GG59]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 検出器を複数個利用するもの (279) | 異種の検出器を用いるもの (175)
Fターム[2F069GG59]の下位に属するFターム
粗、密の (1)
Fターム[2F069GG59]に分類される特許
21 - 40 / 174
情報処理装置およびその動作方法
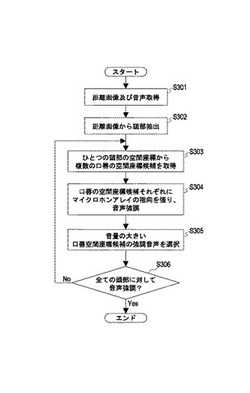
【課題】 従来技術によると、髪の色の異なり等によって、音源(口唇)の位置を推定できない場合がある。
【解決手段】 上記課題を解決するために本発明に係る情報処理装置は、三次元の領域内に存在するオブジェクトと、基準となる面との距離を示す距離画像を取得し、前記距離画像に基づいて、前記距離が極値となる前記領域内の第1の位置を特定し、前記第1の位置から、前記オブジェクトが存在している方向に所定距離離れた第2の位置を特定し、前記第2の位置に基づいて、音源の位置を決定する。
(もっと読む)
軌道監視装置と方法

【課題】自動追尾式トータルステーションの視準が一巡する空白時間に生じた異常を検知できる装置と方法を提供する。
【解決手段】不動点に設置するための自動追尾式トータルステーションと、軌道や枕木に設置するための複数の測点と、枕木に設置するための傾斜計と、各信号を取り込むコンピュータとより構成する。自動追尾式トータルステーションでは複数個所の測点群を一巡して視準し、傾斜計では、各枕木の傾斜を計測し、自動追尾式トータルステーションと傾斜計の信号をコンピュータに入力する。
(もっと読む)
地震スクラム方法及びその装置
【課題】原子炉建屋と隣接建屋又は原子炉建屋と周辺地盤との間に発生する相対変位を計測することにより、原子炉を自動停止し、想定を超える地震に遭遇しても原子炉を安全に停止することができる地震スクラム方法及びその装置を提供する。
【解決手段】地震スクラム方法は、原子炉建屋2とこの原子炉建屋2に隣接する建屋であるタービン建屋3との相対変位又はこの原子炉建屋2に隣接する周辺地盤2aとの相対変位を計測する相対変位計測ステップと、この計測ステップにより出力された変位データが予め定められた閾値を超えるときに原子炉を自動停止するスクラム信号を出力するスクラム信号出力ステップと、を有する。
(もっと読む)
筒状体形状測定装置および筒状体形状測定方法
【課題】筒状体の軸方向及び周方向の全面の外径と肉厚を同時に測定し、その内径および内外径中心線のずれである位置度を測定する装置及び方法を提供する。
【解決手段】筒状体形状測定装置10は、筒状体1の外面を軸方向および周方向に三次元座標を測定するための三次元測定用プローブと、この三次元測定用プローブと所定の距離を隔てて配置され、筒状体1の厚さを測定するための探触子と、この三次元測定用プローブおよび探触子を搭載したプローブユニット12を走査させる走査手段13,14と、走査手段13,14を制御して前記筒状体の軸方向および周方向にわたる外面を走査し、前記筒状体の周方向および軸方向の外径と肉厚とを計測し、この計測結果に基づいて前記筒状体の周方向および軸方向の内径と、前記筒状体の内外径中心線のずれである位置度を算出する三次元・厚さ測定器11を具備する。
(もっと読む)
パターン化された構造を測定するための方法およびシステム
パターン化された構造の少なくとも1つのパラメータの測定で使用するための方法およびシステムが提供される。方法は:構造の異なる位置上の測定に対応する複数の測定された信号を含む測定されたデータと、理論的信号と測定された信号との間の関係は、構造の少なくとも1つのパラメータを示す理論的信号を示すデータとを含む入力データを提供する過程と;構造の少なくとも1つの性質を特徴付ける少なくとも1つの選択されたグローバルパラメータに基づきペナルティ関数を提供する過程と;フィッティングプロシージャの前記実行は、理論的信号と測定された信号との間の最適化された関係を決定するために前記ペナルティ関数を使用することと、構造の前記少なくとも1つのパラメータを決定するために最適化された関係を使用することとを含む、理論的信号と測定された信号との間のフィッティングプロシージャを実行する過程と;からなる。 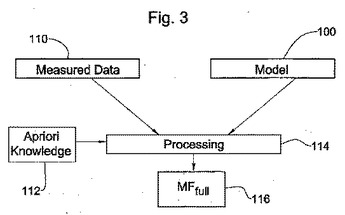 (もっと読む)
(もっと読む)
鉄道軌道の曲率・曲線半径測定方法
【課題】測定範囲を低速域にまで広げることができる鉄道軌道の曲率・曲線半径測定方法を提供する。
【解決手段】鉄道軌道の曲率・曲線半径測定方法において、軌道検測車に角度計をセットし、この角度計により計測した情報に基づいて鉄道軌道の2点の接線の相対角度を求め、一方、前記軌道検測車に車輪回転計をセットし、この車輪回転計により計測した情報に基づいて前記鉄道軌道の2点間の距離を求め、前記鉄道軌道の2点間の相対角度及び前記鉄道軌道の2点間の距離を所与の計算式に代入して計算結果を求め、この計算結果にローパスフィルタ処理を施す。
(もっと読む)
可搬型の関節アーム座標測定機の移動を改善するための傾斜計の使用
第1の位置から第2の位置に可搬型の関節アーム座標測定機(AACMM)を移動する方法において、AACMMは、第1の位置で第1の原点および第1の基準系を有し、第2の位置で第2の原点および第2の基準系を有する、方法であって、可搬型のAACMMが第1の位置および第2の位置のそれぞれにあるようにして、重力ベクトルに対して各方向がほぼ直交する2つの直交方向に沿った可搬型のAACMMの傾斜の量を測定するステップと、可搬型のAACMMが第1の位置にあるようにして第1の目標および第2の目標を測定して、第1の基準系においてx、y、およびz座標の第1の組ならびにx、y、およびz座標の第2の組を取得するステップと、可搬型のAACMMが第2の位置にあるようにして第1の目標および第2の目標を測定して、第2の基準系においてx、y、およびz座標の第3の組ならびにx、y、およびz座標の第4の組を取得するステップと、第1の基準系に対する第2の原点のx、y、およびz座標を発見するステップであって、第2の原点のx、y、およびz座標は、x、y、およびz座標の第1、第2、第3、および第4の組を使用するが、第1の位置および第2の位置でAACMMによって測定された第3の目標のさらなるx、y、およびz座標は使用せずに発見される、ステップとを含む方法。  (もっと読む)
(もっと読む)
取り外し可能なアクセサリを有する座標測定機
可搬型の関節アーム座標測定機(100)が、提供される。座標測定機(100)は、アーム部(104)とともに基部(116)を含む。プローブ端(401)が、基部(116)から遠位にある、アーム部(104)の端部に結合される。プローブ端(401)は、締め具(438)および第1のコネクタ(428)を有する。デバイス(400)が、締め具(438)によってプローブ端(401)に取り外し可能なように結合され、デバイス(400)は、締め具(438)がデバイス(400)をプローブ端(401)に結合するときに第1のコネクタ(428)に係合するように構成された第2のコネクタ(429)を有する。 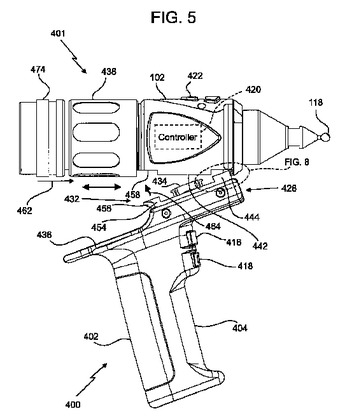 (もっと読む)
(もっと読む)
プレス金型の動的変形測定方法および装置
【課題】プレス金型にセンサを取り付けることなく、プレス成形時におけるプレス金型の動的変形を高精度で測定し得るようにする。
【解決手段】プレス金型の動的変形測定装置は、下金型13および上金型14を備えたプレス金型11と、ボルスタ16およびスライダ17を備えたプレス機本体10との間に着脱自在に配置される測定治具本体33を有し、プレス成形時におけるプレス金型11の動的変形を測定する。測定治具本体33に両端部が滑り支持された水平棒材41には、プレス金型11の弾性変形量を検出するための渦電流変位センサが設けられている。測定治具本体33に設けられた荷重受け駒36には、プレス金型11の圧力分布を検出するための歪みゲージが設けられている。
(もっと読む)
組み込みアーム歪みセンサ
可搬型の関節アーム座標測定機(AACMM)が、手動で位置付けることが可能な関節アーム部と、第1の端部に装着された測定デバイスと、AACMMの構造的コンポーネントであって、軸方向を有する、構造的コンポーネントと、構造的コンポーネントに結合された、それぞれが受感軸を有する少なくとも3つの歪みゲージセンサであって、各歪みゲージセンサの受感軸が、軸方向に対してほぼ平行に向きを決められ、各歪みゲージセンサが、軸方向に垂直な横断面によってほぼ横切られ、アナログ歪みゲージ信号を生成し、歪みゲージセンサが、構造的コンポーネントと横断面の両方の上に存在する任意の点の曲げ歪みを判定するのに十分なデータを提供するように配置される、歪みゲージセンサと、位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。 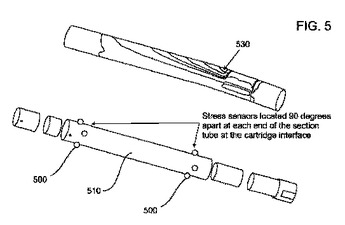 (もっと読む)
(もっと読む)
可搬型の関節アーム座標測定機および統合された環境レコーダ
手動で位置付けることが可能な関節アームと、AACMMの第1の端部に装着された測定デバイスと、位置信号を受信するための、および測定デバイスの位置に対応するデータを提供するための電子回路とを含む可搬型の関節アーム座標測定機(AACMM)。AACMMは、環境レコーダをさらに含む。環境レコーダは、パラメータの値を出力するためのセンサと、メモリと、方法を実施するために環境レコーダによって実行可能な論理とを含む。方法は、パラメータの値を監視するステップと、パラメータの値がプログラム可能な閾値の外にあることを判定するステップとを含む。パラメータの値およびタイムスタンプが、パラメータの値がプログラム可能な閾値の外にあると判定されることに応答してメモリに記憶される。メモリの内容が、電子回路に送信される。  (もっと読む)
(もっと読む)
マルチバスアーム技術を用いた可搬型の関節アーム座標測定機
手動で位置付けることが可能な関節アーム部と、測定デバイスと、電子回路とを含む、マルチバスアーム技術を用いた可搬型の関節アーム座標測定機(AACMM)。電子回路は、アーム部からの位置信号を受信し、測定デバイスの位置に対応するデータを提供するように構成される。AACMMは、プローブ端と、アクセサリデバイスと、エンコーダデータバスと、第1のデバイスデータバスとをさらに含む。エンコーダデータバスは、アーム部および電子回路に結合され、エンコーダデータバスは、電子回路に位置信号を送信するように構成される。第1のデバイスデータバスは、アクセサリデバイスおよび電子回路に結合される。第1のデバイスデータバスは、アクセサリデバイスから電子回路にアクセサリデバイスデータを送信するために、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作するように構成される。 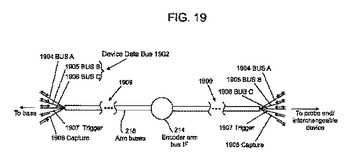 (もっと読む)
(もっと読む)
塗装膜厚測定装置
【課題】被塗装面の領域内において、膜厚を測定するための特定位置に簡単に膜厚センサを位置づけることができる膜厚測定装置を提供する。
【解決手段】塗装膜厚測定装置10は、被塗装面に施された塗装の膜厚を測定する膜厚センサ15と、被塗装面の領域内において、膜厚センサによる測定位置を標定する距離センサ12とを備える。また、塗装膜厚測定装置10は、被塗装面の領域内に設定された特定位置を記憶する記憶部22と、記憶部22に記憶された特定位置と距離センサ12によって標定された測定位置とを比較し、両者の差分を求める比較部24と、比較部24によって求められた差分を通知する通知部20と、をさらに備えることができる。
(もっと読む)
画像から平面を検出する平面検出装置及び検出方法
【課題】車両の揺動が激しい場合でも、射影変換行列Hの初期値を短時間かつ正確に推定することができる画像から平面を検出する平面検出装置及び検出方法を提供する。
【解決手段】移動体の姿勢角を検出するステップと、検出した姿勢角を用いて記憶された平面の法線ベクトルnを修正するステップとを有する。法線ベクトルnを修正するステップにおいて、前時刻(t−1)における姿勢角を用いてカメラ座標系Cの法線ベクトルn(t−1)を慣性座標系Eの法線ベクトルnE(t−1)に変換し、次いで、現時刻(t)における姿勢角を用いて慣性座標系Eの法線ベクトルnE(t−1)をカメラ座標系Cの法線ベクトルn(t)に変換する。
(もっと読む)
配管肉厚測定装置
【課題】配管表面に生じる歪みのうち熱による歪み分を除去して配管の肉厚を正確に測定できる配管肉厚測定装置を提供する。
【解決手段】圧力検出器17で配管の内圧を検出し、歪み検出装置15で配管表面の周方向の歪み及び軸方向の歪みを検出し、温度検出器11で配管の温度を検出し、ヤング率算出手段13は温度検出器11で検出した配管温度に基づいて配管材のヤング率を求め、内圧分歪み算出手段16は歪み検出装置15で検出した配管表面の周方向の歪み及び軸方向の歪みから熱による歪み分を除去し、配管の内圧による配管表面の周方向の歪み及び軸方向の歪みを算出し、肉厚算出手段14は圧力検出器17で検出した配管の内圧、内圧分歪み算出手段16で算出した配管の内圧による配管表面の周方向の歪みまたは軸方向の歪み、及びヤング率算出手段13で求めた配管材のヤング率に基づいて配管の肉厚を求める。
(もっと読む)
測定データ無線転送システム
【課題】消費電力が低く、且つ混信の発生を防ぐことのできる測定データ無線転送システムを提供する。
【解決手段】複数の子機10と、各子機10から送信された測定データを受信する親機20とを備えた測定データ無線転送システム100において、子機10の各々は、初期設定時に親機20に対して、所定の基準時点から測定データを送信するまでの待ち時間を設定する待ち時間情報を含む設定データを要求する設定要求信号を出力し、親機20からの設定データに基づいて測定データの送信タイミングを制御し、測定データの送信タイミングには親機20との通信を行う通信部11を起動状態とさせ、当該測定データの送信後には通信部11を停止させ、親機20は、子機10の各々が互いに異なる送信タイミングで測定データを送信するよう待ち時間情報を決定し、設定要求信号に応じ、複数の子機10に対して待ち時間情報を含む設定データを送信する。
(もっと読む)
測定オブジェクトの形状を触覚光学式に決定するための方法および装置
本発明は、座標測定装置内のワークピースの構造および/または形状を、触覚光学式の測定法によって決定するための方法であって、少なくとも1つの方向における接触型プローブ要素の位置を、光学的に横方向に測定する方法で、第1のセンサによって決定し、かつ、少なくとも1つの第2の方向における接触型プローブ要素の位置を、少なくとも1つの距離センサによって決定する方法に関する。複数のセンサによる接触型プローブ要素の誤りのない検出を可能にするために、接触型プローブ要素を保持手段に取り付けるために、第1のセンサの光路によってビーム方向に貫通される少なくとも1つの柔軟な接続要素を使用し、該接続要素は透明であり、および/または第1のセンサに対し大幅に焦点を外して設けられることが提案される。 (もっと読む)
スタイラス及び接触式変位センサ
【課題】被検物の表面付近まで安全に接近させることができるスタイラスを提供する。
【解決手段】先端部12を被検物Sに接触させて被検物Sの表面を追従させることにより、被検物Sの表面形状を測定するためのスタイラス10は、先端部12の先端12Aよりも前方の所定位置Pを通るように光Lを照射する発光部13と、発光部13から照射された光Lが反射された反射光L1を検知する受光部14とを備えることを特徴とする。
(もっと読む)
動き検出装置および方法
【課題】 動き検出装置および方法を提供する。
【解決手段】 1つ以上の第1回転角測定センサを用いて第1角を測定し、1つ以上の第2回転角測定センサおよび前記1つ以上の第1回転角測定センサと相違する1つ以上の2軸の角速度センサを用いて第2角を推定し、1つ以上の第3回転角測定センサおよび前記1つ以上の2軸の角速度センサを用いて前記2軸のうちのいずれか1つである第3角を推定する動き検出装置を提供する。
(もっと読む)
測定方法及び測定装置
【課題】簡便な方法で又簡単な装置で、移動体に設定された測定点、測定点間の距離の測定、或はGPS、IMU等の座標系に対するオフセット量を測定する。
【解決手段】移動体1に対して設定した座標系に対して所定の関係に測定棒6を設置し、該測定棒6の所定位置を移動体1が設置されている地面に転写すると共に測定対象物の測定点を地面に転写し、転写された前記所定位置と転写された前記測定点間の地面上での距離を測定し、距離測定結果に基づき測定点と前記測定棒6の地面上での関係を求め、得られた関係と前記座標系に対する測定棒6との関係から前記測定点の前記座標系に於ける水平座標面での位置を求める測定方法に係り、又前記所定位置と地面、前記測定点と地面との鉛直距離を測定し、前記座標系に於ける前記測定点の3次元位置を測定する。
(もっと読む)
21 - 40 / 174
[ Back to top ]