
Fターム[2F069GG59]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 検出器を複数個利用するもの (279) | 異種の検出器を用いるもの (175)
Fターム[2F069GG59]の下位に属するFターム
粗、密の (1)
Fターム[2F069GG59]に分類される特許
101 - 120 / 174
管状体の振れ測定方法及びその装置
【課題】回転する管状体の振れをより正確かつ迅速に測定できる測定方法とその装置を提供すること。
【解決手段】回転可能な管端チャックへ管状体の内側面を押圧する状態で当該管状体の一端部を保持させ、管端チャックにより前記管状体を回転させながら、管状体の他端部内の計測位置から管状体の内周までの距離を計測して回転角度毎の計測値を得るとともに、管状体の外周から離れた測定位置から管状体の外周までの距離を測定して回転角度毎の測定値を得、前記計測値に演算処理を施すことにより管状体の他端部の内径中心を算出して当該管状体の仮想中心軸を求め、前記測定位置において管端チャックの回転軸線と直交する面における前記回転軸線に対する前記仮想中心軸の偏倚量により前記測定値を補正する手段を含む。
(もっと読む)
バッチリアクター内の基板ホルダのアライメントを決定するためのセンシングシステム及び方法

【課題】均一なガスフローパターンにより均一な堆積フィルムを生じる半導体処理システムを提供する。
【解決手段】 半導体基板を処理するために、リモートコントロールされ、基板ホルダのスロット内に挿入されたセンサシステム100が、リアクター等のバッチリアクター内において、ウェハボート等の基板ホルダのアライメントを測定するために用いられる。センサシステム100は、コントローラと通信するためのトランシーバと、プロセスチャンバ外部のデータ収集ユニットとを備える。さらに、センサシステム100は、センサからプロセスチャンバの壁まで距離を測定するための距離センサ120を備える。センサは、プロセスチャンバの周囲360°に渡る範囲の測定を得るために回転される。プロセスチャンバ内の基板ホルダのアライメントは、回転角と、測定された距離又は距離センサ120によって受信された信号との関係に基づいて決定される。
(もっと読む)
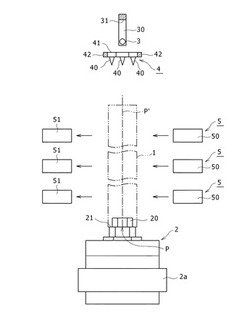
舵角検出装置
【課題】全舵角範囲に亘る回転軸の回転角度を精度良く検出し、車両の舵角を簡素な構成にて精度良く検出可能な舵角検出装置を提供する。
【解決手段】ステアリングホイール30の操作に応じたステアリング軸3の回転を操舵用の車輪12,12に伝え、該車輪12,12の向きを変えて舵取りされる車両の操舵角度を、ステアリング軸3の複数回転に亘る回転角度を求めることにより検出する舵角検出装置において、ステアリング軸3に係合され、ステアリング軸3の回転に応じて移動する移動体6の移動位置を位置センサ7により検出し、この検出結果によりステアリング軸3が中立位置から左右の何回転目の領域にあるかを判定する。回転角センサにより判定された領域内でのステアリング軸3の回転角度を求めて全舵角範囲内での操舵角度を算出する。以上により簡素な構成により全舵角範囲に亘って高精度の舵角検出が可能となる。
(もっと読む)
位置検出装置、自律移動装置、位置検出方法および位置検出プログラム
【課題】音源物体の検出成功率を向上させるとともに安定させること。
【解決手段】ロボット装置100において、画像入力部112によって入力された画像と、音源情報の適用視覚情報とに基づいて画像処理手順を実行して音源物体102の視覚特徴を検出し、音源物体102の少なくとも方位を示す視覚定位情報を出力する視覚特徴検出定位部114と、音声入力部113によって入力された音声と、音源情報の適用聴覚情報とに基づいて音声処理手順を実行して音源物体102の聴覚特徴を検出し、音源物体102の少なくとも方位を示す聴覚定位情報を出力する聴覚特徴検出定位部115と、検出戦略情報に基づいて、視覚特徴検出定位部114または聴覚特徴検出定位部115を制御し視覚定位情報または聴覚定位情報から音源物体102の存在する位置を検出する音源物体検出部116とを備えた。
(もっと読む)
帯状体の表面欠陥検査装置
【課題】帯状体表面の欠陥を、蛇行しているときにも検出できること、及び欠陥の大きさ、種類、形状も認識できること。
【解決手段】ガイドロール(4)(5)に巻装されて走行する磁気テープ(3)に対向して配設されるラインCCDカメラ(6a、6b、6c、6d、6e)と、磁気テープ(3)を照射する光照射手段(9)と、磁気テープ(3)の走行速度を検出するパルス発生器(11)と、ラインCCDカメラの撮像した画像を処理する画像処理手段(7a、7b、7c)とを具備し、画像処理手段(7a、7b、7c)は少なくとも磁気テープ(3)の一方の縁部と表面上の欠陥を認識させ、パルス発生器(11)の出力に基づく磁気テープ(3)の走行方向における欠陥の位置と、縁部から欠陥までの距離とを演算するようにした。
(もっと読む)
モーションキャプチャー装置およびそれに係る方法
本発明はN個の関節化されたセグメントで構成されるある構造体の運動を捕捉するための装置に関し、以下の特徴的構成を有する。
− 連続的に時間tkにおいて、基準を形成するある基準座標系におけるランク
少なくとも出力する第一の手段(ML)、ここで、kは1か、または1より大きい整数である、そして、
− 様々なセグメントにわたって分布し、ランク1からランクnの各セグメン
本発明は生体力学の解析、遠隔操作、ある人物のアニメーション等に応用される。
(もっと読む)
取扱装置の工具の動きを追跡するための装置及び方法
【課題】 取扱装置の工具の動きを追跡するための装置及び方法を提供することである。
【解決手段】 取扱装置(2)の工具の動きを追跡するための装置(1)であって、上記工具に位置合わせされ、追跡されることができる少なくとも1つの方向性放射器(5)と、動きを決定するための信号評価装置(4)を有する装置(1)が記載される。上記方向性放射器(5)は固定された空間平面に対して調節可能な角度で方向性ビーム(6)を位置合わせさせるためのアクチュエーター、及び上記信号評価装置(4)に接続され、上記空間平面に対する現在の方向性ビームの角度を決定するための角度センサーを有する。
(もっと読む)
内部検査装置
【課題】管路計測や孔内計測において、管路や地盤等の内部状況を的確に把握可能な内部検査装置を提供する。
【解決手段】ピッチ角、方位角、ロール角を検出する角度検出器2と、この角度検出器2の管内又は孔内の壁面に対する踊り量を検出する非接触変位センサ3,4と、を有し、管路内又は地盤に形成された孔内に挿入され、内部を移動可能な内部検査装置1であって、該管路内又は孔内を撮影する撮影手段を先端に備える構成とする。
(もっと読む)
車両の前方立体物認識装置
【課題】高精度な前方認識手段を用いることなく、一般に普及している前方認識装置を用いて前方立体物を高精度に認識できるようにする。
【解決手段】立体物検出処理部9は、ミリ波レーダ装置3、ステレオカメラ装置2、レーザレーダ装置4の各前方認識手段で検出した前方立体物Mi,Ii,Liに基づき、車体幅方向の位置座標、車体前後方向の距離座標、車体前後方向の相対速度からなる特徴量を求め、各前方立体物Mi,Ii,Liの全ての組み合わせから各特徴量の同一確率を各特徴量の誤差に関するガウス分布に基づき求める。そして、求めた同一確率に基づき各前方立体物に同一立体物があるか否かを判定し、同一と判定された各前方立体物どうしは、その各特徴量に基づいてフュージョン立体物を生成し、非同一と判定された前方立体物は、当該前方立体物を特定する特徴量のみでフュージョン立体物を生成する。
(もっと読む)
形状測定装置
【課題】 表面形状の計測を高精度化することができ、触針を簡易に支持することによって小型の形状測定装置を提供すること。
【解決手段】 XYステージ装置82に設けたX駆動装置50がエアスライドによって可動部52を非接触で支持しリニアモータ51a,51bによって可動部52を駆動するので、載置台82aのXY軸方向に関する運動が滑らかで高精度になる。よって、光学素子OEをXY面内で移動させる際にZ軸方向の微小変位が生じにくくなり、触針11の変位量計測を正確にすることができ、光学素子OEの表面形状の計測精度を向上させることができる。
(もっと読む)
顕微鏡システム、観察方法および観察プログラム
【課題】対象物の所望の位置を容易かつ迅速に観察することができる顕微鏡システム、顕微鏡システムを用いた観察方法および観察プログラムを提供する。
【解決手段】顕微鏡システムにおいて、使用者は、原子間力顕微鏡の試料載置台上に試料を載置し(ステップS1)、光学顕微鏡による試料の観察を行う(ステップS2)。使用者は、光学顕微鏡による試料の観察時に光学顕微鏡の倍率の調整を行う(ステップS2a)。また、使用者は、光学顕微鏡による試料の観察時に原子間力顕微鏡による試料の観察対象領域の探索も行う(ステップS2b)。続いて、使用者は、ステップS2bにおいて探索した観察対象領域の中から、さらに原子間力顕微鏡による試料の観察対象領域を指定する(ステップS3)。その後、使用者は、ステップS3において指定した観察対象領域について原子間力顕微鏡による試料の観察を行う(ステップS4)。
(もっと読む)
顕微鏡装置
【課題】試料の振動を防止することができる走査型プローブ顕微鏡を備える顕微鏡装置を提供することである。
【解決手段】原子間力顕微鏡は、AFMスキャナおよび試料載置台を備える。試料載置台は、移動プレート、Z方向移動機構およびXY方向移動機構30cを含む。XY方向移動機構30cは、2つのモータMa,Mb、Y方向移動機構380およびX方向移動機構390を有する。Y方向移動機構380およびX方向移動機構390には、あり溝ガイド方式が用いられている。
(もっと読む)
顕微鏡装置
【課題】振動の発生を防止することができる走査型プローブ顕微鏡を備える顕微鏡装置を提供することである。
【解決手段】原子間力顕微鏡10および光学顕微鏡20は、顕微鏡連結部材40に取り付けられる。顕微鏡連結部材40は、弾性部材54a,54b,54c,54dを介してベース筐体部50により保持される。顕微鏡連結部材40に、おもりWが取り付けられる。おもりWの取り付け位置は、顕微鏡装置の各構成要素の重量、設置位置等を考慮して、各構成要素に発生する振動を確実に減衰できるように設定されている。
(もっと読む)
顕微鏡システム、観察方法および観察プログラム
【課題】広範囲に渡る試料の観察を容易に行うことができるとともに、迅速かつ正確な観察を行うことが可能な顕微鏡システム、観察方法および観察プログラムを提供する。
【解決手段】試料上の走査単位領域および観察対象領域を設定する。CPUは観察対象領域内の走査単位領域の個数および位置を設定し、各走査単位領域の形状情報を取得する(ステップS21)。CPUは、取得した形状情報に基づいて全ての走査単位領域の上面視画像を表示装置に表示させる(ステップS22)。複数の走査単位領域の上面視画像を使用者が手動で連結する場合、CPUは選択された上面視画像に対するオフセット処理を行う(ステップS27)。オフセット処理は、隣接する走査単位領域の上面視画像の重複領域の画像のピクセルの階調がほぼ等しくなるように一方の上面視画像のピクセルの階調をオフセットすることにより行われる。
(もっと読む)
光学素子測定用治具、並びに、光学素子の面形状測定装置及び方法
【課題】 光学素子を確実に固定することによって高精度の形状測定を可能にし、好ましくは、光学素子を表裏の両面から計測することができる光学素子測定用治具を提供すること。
【解決手段】 この光学素子測定用治具10において、3つの球面部30と、3つの当接部材50A,50B,50Cとは、光学素子OEの外縁部PAに沿って等間隔で互い違いに配置されている。この結果、球面部30と当接部材50A,50B,50Cとの干渉を防止しつつ両者を効率的に配置でき、基板20上に光学素子OEを安定した状態で固定することができる。つまり、球面部30や光学素子OEの光学面の計測を確実に行うことができ、その作業性を高めることができる。
(もっと読む)
高炉炉底管理方法
【課題】熱電対を利用して高炉炉底の耐火レンガの残厚を推定する方法において、耐火レンガ残存厚を一層高精度に推定できる高炉炉底管理方法を提供する。
【解決手段】宇宙線ミュオンを利用して耐火物と炉内との境界位置を判定する。境界位置の判定は、宇宙線ミュオンを計測する計測部12により高炉炉底2を透過して飛来する炉底透過の宇宙線ミュオン強度と、該炉底透過の宇宙線ミュオンの飛来方向の判別情報と、高炉を非透過の非透過宇宙線ミュオン強度とを一定時間蓄積し、該蓄積データに基づいて炉底の状態を炉底透過の宇宙線ミュオン強度と非透過宇宙線ミュオン強度との強度比で表し、該強度比に基づいて行う。この判定基準として高炉炉底耐火物内に配置された温度計測手段9a、9bにより計測した計測温度の変動から耐火物への付着物厚みの増減を推定し、短期的な炉内状況変動も管理する。
(もっと読む)
非接触式膜厚計
【課題】塗膜の膜厚やその乾燥/湿潤状態に関わらず、塗膜の厚さを簡便にかつ高精度に計測する。
【解決手段】非接触式膜厚計10において、本体11の底面13に渦流変位計のための中空管状のプローブ12を取り付ける。プローブ12の先端にコイル14を設ける。底面13において、中空管状のプローブ12の内側にレーザ変位計のレーザ照射部15とレーザ受光部16とを設ける。コイル14により交流磁界を生成し、金属板Sに渦電流を誘導する。誘導された渦電流によるコイル14のインダクタンス変化を検出し、プローブ12と金属板Sまでの距離L2を算出する。一方、レーザ照射部15からレーザ光線を照射し、塗膜Fの表面で反射されたレーザ光線をレーザ受光部16において検出する。三角測距の原理に基づいて、レーザ変位計と塗膜表面との間の距離L1を算出する。距離L1、L2に基づいて塗膜Fの厚さδを算出する。
(もっと読む)
プローブ観察装置、表面性状測定装置
【課題】簡便な操作でプローブを高精度に観察できるプローブ観察装置を提供する。
【解決手段】プローブ210を撮像するカメラ230と、カメラ230にて取得した画像データを画像処理する画像処理部と、画像処理部にて画像処理された画像データを表示するモニタ400と、手動操作にて画像処理内容を入力指令するマウス500とを備える。画像処理部は、マウスにて入力される指令に応じて画像データを加工処理する画像データ加工処理部を備える。カメラ230は、低倍率のレンズ系を有し、プローブ210を視野内に入れた状態でプローブ210に対する相対位置が固定された状態で設けられている。
(もっと読む)
多層フィルムの厚さを測定する方法
本発明は、異なる不導体材料から成る複数層を有する多層フィルムの厚さを検出する方法に関するものである。この方法によれば、多層フィルム13の厚さが、第1センサ17と、第2センサ16と、任意の複数追加センサとによって測定される。第1センサ17は、約1−2分間持続する短い周期で全厚の分布を測定するが、測定誤差の幅が大きい。第2センサ16は、測定誤差の幅は小さいが、全厚分布の測定周期が長く、約10−30分間持続する。これら2つの厚さ分布を比較することで、第1センサ17に対する修正分布が計算できる。この修正分布は、長い周期を通じて一定のままであれば、より正確な新たな厚さ分布が第2センサによって利用可能にされ、新たな修正分布の計算が可能になるまで、センサ17のすべての厚さ分布に適用できる。  (もっと読む)
(もっと読む)
水圧鉄管の厚み測定装置及びその厚み測定方法
【課題】長さが長い水圧鉄管の厚み測定に適しており、その厚み測定を経済的かつ安全に行うことが可能な水圧鉄管の厚み測定装置及びその厚み測定方法を提供する。
【解決手段】水圧鉄管11の内面12に吸着する複数の車輪13及び走行距離計18を備えた台車14と、水圧鉄管11の塗膜厚み及び総厚みの測定に使用する各センサー22、23を備える計装部19とを有し、計装部19は台車14と分離可能になって、計装部19には更に、台車14の前方、後方、及び各センサー22、23を撮像するカメラ27、28、32と、水圧鉄管11の清掃手段21と、台車14の傾きを検知する角度センサーと、計装部19の送電及び信号通信を行うケーブル31と、その巻取手段42が設けられている。その測定方法は、上流側から下流側へかけて下方へ傾斜又は垂直に配置された水圧鉄管11の上流側に厚み測定装置10を配置した後、下流側へ向けて走行させる。
(もっと読む)
101 - 120 / 174
[ Back to top ]