
Fターム[2F069GG59]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 検出器を複数個利用するもの (279) | 異種の検出器を用いるもの (175)
Fターム[2F069GG59]の下位に属するFターム
粗、密の (1)
Fターム[2F069GG59]に分類される特許
81 - 100 / 174
保管装置及び同保管装置を備えた計測装置
【課題】オイルミストや塵などの付着から不使用時にある検出手段を保護して測定精度の悪化を防止する保管装置を提供すること。
【解決手段】被検物Mの形状情報を採取するための検出手段(非接触センサ20a、タッチプローブ20b)をその不使用時に保管する保管装置であって、前記不使用時の検出手段をその周囲の雰囲気から隔てる保護手段(プローブボックス30,エアーポンプ40)を備える。
(もっと読む)
取付け角度検出装置

【課題】車載装置の取付け角度が変更された場合においても車載装置による処理の精度を維持する取付け角度検出装置を提供する。
【解決手段】取付け角度検出装置は、車載装置の加速度センサとジャイロセンサとGPS受信装置との出力を用いて車載装置の取付け角度を算出し、今回算出した取付け角度と前回算出した取付け角度とを比較して取付け角度の変更を検出し、取付け角度の変更を検出した場合に加速度センサまたはジャイロセンサの出力を補正するパラメータを求める学習機能をリセットする。
(もっと読む)
身体傾斜角計測器および身体ねじれ角計測器
【課題】回旋の測定に大いに役立つ身体傾斜角計測器および身体ねじれ角計測器を提供する。
【解決手段】第1腕22および第2腕23の先端21a、21bはそれぞれ身体の特定部位に突き当てられる。このとき、第1腕22および第2腕23はできる限り水平姿勢に維持される。第1腕22および第2腕23の接触が確保された時点でスイッチボタン32が押される。スイッチ回路は基準軸線17回りで測定開始位置を特定する。第1腕22および第2腕23は最初の測定部位から次の特定部位に移動する。第1腕22および第2腕23の先端は2番目の特定部位に突き当てられる。スイッチボタン32が押されると、スイッチ回路は基準軸線17回りで測定終了位置を特定する。測定開始位置および測定終了位置の間で基準軸線17回りに回転角は測定される。1つの身体傾斜角計測器11で傾斜角の測定および回旋の測定は実現される。
(もっと読む)
角度割り出し精度測定装置、及び角度割り出し精度測定方法
【課題】
回転移動軸の角度割り出し精度測定を容易し、測定時間の短縮とコストの削減を可能にする角度割り出し精度測定装置、及び角度割り出し精度測定方法を提供すること。
【解決手段】
エンコーダ11と、エンコーダ11の摺動抵抗の大きさに対応する外径形状と長さとを有する取付けシャフト12と、補正値を算出する演算部とを備えた角度割り出し精度測定装置10により回転移動軸13の角度割り出し精度を測定する。
(もっと読む)
長尺体の表面形状測定方法および表面形状測定装置
【課題】オートコリメータでは高精度測定ができない長さが1m以上の長尺状物の表面形状(真直度)を複数の変位センサを用いて測定する。
【解決手段】3本の変位センサA,B,Cをピッチ間隔p毎に直列にアーム311に固定し、テーブル上に固定された被測定物の真直度を、オートコリメータが高精度に測定できる作動範囲ではオートコリメータにより測定される値を用いて2本の変位センサA,Bにより2点法で検出された真直度値のピッチングの補正を行って初期真直度値データ列を得、オートコリメータが高精度に測定できない作動範囲における真直度の測定においては第三の変位センサCより検出される真直度値で測定基準を作り、この測定基準の測定点の値を基準にして変位センサA,Bによる2点法の出力からピッチングを検出し、それを使用してピッチング補正しながら次々に繰り返して測定範囲を広げて延長真直度値データ列を得、真直度曲線を出力する。
(もっと読む)
シート状物湾曲測定装置およびシート状物湾曲測定方法
【課題】シート状物の蛇行の有無に関わらず、テンションが付与された状態のシート状物の湾曲を精度良く測定する。
【解決手段】シート電極湾曲測定装置100に、シート電極11のシート面に当接するテンション検出用ローラ110と、テンション検出用ローラ110の一端および他端への作用力をそれぞれ検出するテンション検出装置121・122と、シート電極11の蛇行量を検出する蛇行量検出装置151・152と、蛇行量検出装置151・152により検出されるシート電極11の蛇行量に基づいてテンション検出装置121・122により検出されるテンション検出用ローラ110の一端および他端への作用力の検出値を補正し、当該補正されたテンション検出用ローラ110の一端および他端への作用力の検出値の差分に基づいてシート電極11の湾曲の有無を判定する湾曲判定装置160と、を具備した。
(もっと読む)
情報処理プログラムおよび情報処理装置
【課題】加速度センサを備える装置の姿勢を正確に算出する。
【解決手段】コントローラは、所定の撮像対象を撮像するための撮像手段と、当該入力装置に加わる加速度を検出する加速度検出手段とを備えている。ゲーム装置は、撮像手段によって撮像された撮像画像に含まれる撮像対象の画像に関する当該撮像画像内における傾きに基づいて、撮像手段の撮像方向を軸とした回転に関するコントローラの傾きを第1の傾きとして算出する。さらに、ゲーム装置は、加速度検出手段によって検出された加速度に基づいて、撮像方向と異なる方向を軸とした回転に関する傾きを第2の傾きとして算出する。ゲーム装置は、第1の傾きおよび第2の傾きをコントローラの姿勢として用いて所定の処理を実行する。
(もっと読む)
封込建物の損傷の危険性を確認するための方法およびシステム
本発明は、封込建物、特に製品を保管するか又は貯蔵するためのコンクリートで作られる封込建物についての損傷の危険性を確認する方法であって、前記方法が、建物及び/又は製品に関するデータから、前記建物に貯蔵すべき製品を充填する段階において建物の計画された理論的挙動を決定する段階と、前記建物に前記製品を充填する段階において建物の実際の挙動を決定する段階と、理論的挙動と実際の挙動を比較することにより損傷の危険性を決定する段階とを含む、前記方法に関する。又、本発明の方法は、前記封込建物を空にする段階に応用することができる。 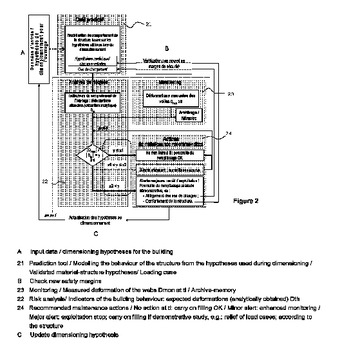 (もっと読む)
(もっと読む)
非接触ブレード振動測定装置及び方法
回転ブレード(10)で形成されたローター(3)の外周にセンサー(6,7,8,9)が配置され、信号検出ユニット(14)及び評価ユニット(13)を備えた非接触ブレード振動測定装置であって、ローターの位置及び/またはハウジングの歪みを測定するために供給される、ことを特徴とする、非接触ブレード振動測定装置。
さらに、本発明に係る方法は、非接触ブレード振動測定のために特定された方法である。本発明は、先行技術の技術的な問題を回避し、非接触ブレード振動測定のための、改良された装置及び改良された方法を提供する。特に、本発明における改良によって、ローターの半径方向への移動とハウジングの歪み(楕円変形)の測定データへの影響が回避されるようになり、すべての条件下で振動解析に対する高い振幅解析能を保つことができる。
【代表図】図1 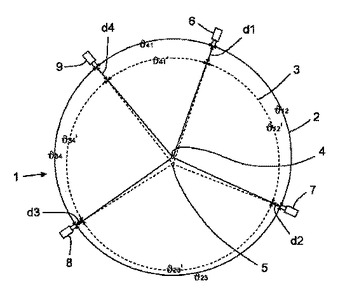 (もっと読む)
(もっと読む)
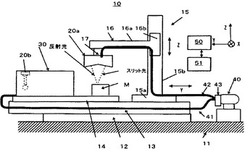
配管肉厚測定装置及び方法
【課題】施工が容易で配管の高温部においても配管の肉厚を測定できる配管肉厚測定装置を提供することである。
【解決手段】圧力検出器15で配管の内圧を検出し、歪み検出装置16で配管表面の周方向または軸方向の歪みを検出し、温度検出器11で配管の温度を検出する。ヤング率算出手段13は温度検出器11で検出した配管温度に基づいて配管材のヤング率を求め、肉厚算出手段14は、圧力検出器15で検出した配管の内圧、歪み検出器16で検出した配管表面の歪み及びヤング率算出手段13で求めた配管材のヤング率に基づいて配管の肉厚を求める。
(もっと読む)
運動誤差測定基準及び運動誤差測定装置
【課題】ピッチング誤差やローリング誤差を抽出でき高精度な測定を行える運動誤差測定基準、運動誤差測定装置を提供する。
【解決手段】運動誤差測定基準は、例えばベースに対して所定の方向に移動可能に支持されたステージの運動誤差を求める測定装置で利用することが出来るものであり、前記母線に沿って前記原点からの距離が既知である所定点において、実際の物体面と、母線が構成すべき数学的理想面との差が、面外への微小変位と、面法線の方向の微小角変位に関して校正されており、その校正値が記憶されて演算に供しうる数値データとして付与されているものである。
(もっと読む)
微細形状測定装置
【課題】本発明の目的は高精度な形状測定を行う微細形状測定装置を提供することにある。
【解決手段】固定端14bに保持された状態でワーク40をなぞるスタイラス34を自由端14aに持つ可撓性カンチレバー14と、該固定端14bを上下動する駆動手段20と、該ワーク40に対する位置及び姿勢が変化しない基準部材22と、該基準部材22とスタイラス34との上下方向の相対変位を測定し、自由端変位情報を出力する自由端変位計24と、該基準部材22と固定端14bとの上下方向の相対変位を測定し、固定端変位情報を出力する固定端変位計26と、該自由端変位情報及び固定端変位情報に基づきカンチレバー14の上下方向のたわみ量を求める演算手段28とを備え、該たわみ量が所定値となるように該固定端14bを上下させつつ該ワーク40を走査して得られた、該自由端変位情報に基づき、該ワーク40の形状を把握することを特徴とする微細形状測定装置10。
(もっと読む)
知的プローブ
本システム、方法、製品、ソフトウェア及び装置は知的プローブシステム又はその構成部分である。本発明のある実施形態では、1個又は複数個の可換なプローブ内にICチップを埋め込んであるので、CMM上でのプローブ換装を、何回でも、迅速に、容易に且つ誤りなく行うことができる。 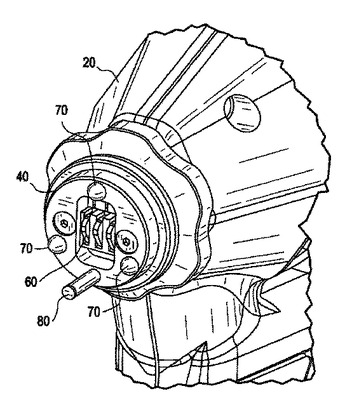 (もっと読む)
(もっと読む)
舵角検出装置
【課題】ステアリング軸の回転角度の検出値の積算による舵角の検出を、積算のための始点が不明となる状況下においても遅滞なく行わせることができるようにする。
【解決手段】ステアリング軸3に周設された主動歯車61に、外周縁から突出するように押圧片66を設け、主動歯車61に並設した従動円板63に、複数の押圧ピン65,65…と、夫々の押圧ピン65,65…の両側の部分歯部64,64…とを設け、主動歯車61が1回転する毎に押圧片66が押圧ピン65を押して従動円板63を回転させ、部分歯部64が主動歯車61に噛合して従動円板63が定量回転するように構成し、この従動円板63の回転位置から得られる絶対舵角をステアリング軸3の回転角度の積算のための始点として用いる。
(もっと読む)
舵角センサ
【課題】 より高精度の舵角センサを提供する。
【解決手段】 ステアリングシャフト105に取り付け、当該ステアリングシャフト105の絶対角度を測定するための舵角センサであって、所定回転数回転するステアリングシャフトの回転角度を測定して粗信号を出力する粗信号測定機構45及び微信号を出力する微信号測定機構15と、粗信号測定データ及び微信号測定データに基づいて当該ステアリングシャフト105の絶対角度を演算する演算機構37と、を備え、当該演算機構37は、当該測定データのうち、所定範囲を逸脱した異常データを検出・排除する異常データ検出・排除部と、を含めて構成してある。そのため、主動ギア(ステアリングシャフト)の回転角度の検知をより精度の高いものとする。これにより、舵角センサの高精度化が実現する。
(もっと読む)
姿勢角決定装置およびその決定方法
【課題】複雑な関係にある座標系間であってもその姿勢関係を容易に,精度良く求めることのできる姿勢角決定装置およびその決定方法を提供すること。
【解決手段】本発明の姿勢角決定装置は,各リンクに設定された3軸直交座標系の各軸について,軸方向と重力ベクトルの方向との間の角度である傾斜角を取得する傾斜角取得部と,第1リンクと第2リンクとの姿勢関係を固定したまま最大3通りの全体姿勢を取らせる姿勢変化指示部と,各全体姿勢における各リンクについて各軸方向の傾斜角から傾斜ベクトルを求める傾斜ベクトル算出部と,各リンクについて全体姿勢ごとに求められた傾斜ベクトルにより傾斜行列を求める傾斜行列算出部と,傾斜行列算出部により求められた各リンクの傾斜行列に基づいて,一方と他方の逆行列との積を求めることにより,姿勢角を表すリンク行列を算出するリンク行列算出部とを有する。
(もっと読む)
剛体電車線凹凸測定装置
【課題】構造が簡単で、測定操作が比較的に容易であり、しかも凹凸を高精度で簡易に測定することができる剛体電車線凹凸測定装置を提供する。
【解決手段】本発明の剛体電車線凹凸測定装置は、レール2上を移動する自走式架線工作車1に固定される固定枠6と、この固定枠6に対して可動する可動枠7と、可動枠7に固定されて剛体電車線のパンタグラフ摺接面との間の変位を非接触状態で測定する計測するレーザ変位センサ10と、レーザ変位センサ10の上下振動の加速度を計測する上下加速度センサ9とからなる。
(もっと読む)
操舵角センサの異常判定装置
【課題】車両速度が遅い場合であれ、操舵角センサの異常の有無を高い精度で判定することができる操舵角センサの異常判定装置を提供する。
【解決手段】操舵角センサ21の異常の有無を判定する異常判定装置として、ナビゲーションシステム22の地理情報及び位置情報を参照しつつ車両がカーブ路走行中にあるカーブ路走行期間を検出するプログラムと、そのカーブ路走行期間内のセンサ出力の最大値を検出するプログラムと、その最大値について所定の閾値との対比を行うことにより該最大値が相当量に足りるかあるいは満たないかを判断するプログラムと、その判断により最大値が相当量に満たないと判断された場合に操舵角センサ21が異常である旨の判定をするプログラムと、を備える構成とする。
(もっと読む)
ヘッドモーショントラッカ装置及びその使用方法
【課題】 交流磁気方式のHMT、光学方式のHMTにおいて測定不可のときに、移動体に設定された基準方向に対する頭部角度を算出することができるヘッドモーショントラッカ装置及びその使用方法を提供する。
【解決手段】 磁気方式又は光学方式モーショントラッカにより搭乗者の頭部角度を含む第一相対頭部情報を算出する主頭部情報算出部とを備えた移動体センサと、移動体センサに基づいて移動体の動きを表す絶対移動体情報を算出する絶対移動体情報算出部と、頭部センサと、頭部センサの出力信号に基づいて移動体と頭部との動きとを合成した絶対頭部情報を算出する絶対頭部情報算出部と、絶対移動体情報と絶対頭部情報とに基づいて第二相対頭部情報を算出する副頭部情報算出部と、主頭部情報算出部による第一相対頭部情報の算出が不適当な領域において副頭部情報算出部により第二相対頭部情報を算出する切替部とを備える。
(もっと読む)
リソグラフィ装置、キャリブレーション方法、デバイス製造方法、およびコンピュータプログラム
【課題】
リソグラフィ装置におけるレベルセンサまたは高さセンサのキャリブレーションのための改良方法を提供する。
【解決手段】レベルセンサによって得られる基板位置測定のプロセス依存性を低減させるべく、複数のレベルセンサデバイスにおける測定値間の差を補い、かつ前記基板の特性に対応する、前記レベルセンサシステムについての少なくとも1つのキャリブレーション値を取得することと、少なくとも1つのキャリブレーション値に基づき、前記複数のレベルセンサデバイスを用いて、基板の表面の位置を測定する。
(もっと読む)
81 - 100 / 174
[ Back to top ]