
Fターム[2F069GG59]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 検出器を複数個利用するもの (279) | 異種の検出器を用いるもの (175)
Fターム[2F069GG59]の下位に属するFターム
粗、密の (1)
Fターム[2F069GG59]に分類される特許
121 - 140 / 174
水圧鉄管の厚み測定装置及びその厚み測定方法
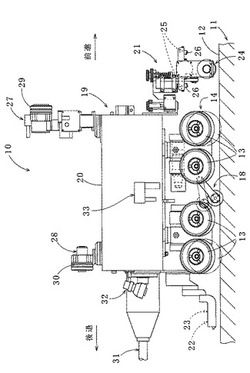
【課題】長さが長い水圧鉄管の厚み測定に適しており、その厚み測定を経済的かつ安全に行うことが可能な水圧鉄管の厚み測定装置及びその厚み測定方法を提供する。
【解決手段】水圧鉄管11の内面12に吸着する複数の車輪13及び走行距離計18を備えた台車14と、水圧鉄管11の塗膜厚み及び総厚みの測定に使用する各センサー22、23を備える計装部19とを有し、計装部19は台車14と分離可能になって、計装部19には更に、台車14の前方、後方、及び各センサー22、23を撮像するカメラ27、28、32と、水圧鉄管11の清掃手段21と、台車14の傾きを検知する角度センサーと、計装部19の送電及び信号通信を行うケーブル31と、その巻取手段42が設けられている。その測定方法は、上流側から下流側へかけて下方へ傾斜又は垂直に配置された水圧鉄管11の上流側に厚み測定装置10を配置した後、下流側へ向けて走行させる。
(もっと読む)
物体形状検査装置及び物体形状検査方法

【課題】 被測定物(例えば自動車用ガラス又はその検査用枠材)の形状を高精度に検査することができる物体形状検査装置の提供。
【解決手段】 被測定物の2点以上の測定点についての少なくとも鉛直方向に関する位置情報を、接触方式又は非接触方式の測定手段を用いて取得する物体形状検査装置60において、被測定物の各測定点に対応する各測定位置に、測定手段を案内する案内機構66と、測定手段62bの測定データを、測定手段の水面に対する移動軌跡に関する事前取得情報に基づいて補正して、各測定点の鉛直方向の位置情報を生成するデータ処理装置80と、を備えることを特徴とする。
(もっと読む)
ホイ−ルアライメント測定方法およびその測定装置
【課題】 例えば前輪のト−角測定および調整に好適で、車両のステアリング機構によるヒステリシス情報を基にアライメントを測定し、実際のアライメント状態に合致した正確なアライメント情報を得られるとともに、測定値のバラツキを低減し、測定値の再現性の向上を図れる、ホイ−ルアライメント測定方法およびその測定装置を提供すること。
【解決手段】 水平面と平行に回動可能なロ−ラフレ−ム32に設けた複数のロ−ラ33に車輪34を載置する。
前記車輪34のアライメントを測定するアライメント測定方法であること。
前記ロ−ラフレ−ム32を、被検車両のステアリング機構のヒステリシス位置情報を基に所定角度回動する。
ロ−ラフレ−ム32の前記回動位置でアライメントを測定する。
(もっと読む)
ホイ−ルアライメント測定方法およびその測定装置
【課題】 例えば前輪のト−角測定および調整に好適で、車両のステアリング機構によるヒステリシス情報を基にアライメント測定し、実際のアライメント状態に合致した正確なアライメント情報を得られるとともに、簡単な構成によって測定値のバラツキを低減し、測定値の再現性の向上を図れる、ホイ−ルアライメント測定方法およびその測定装置を提供すること。
【解決手段】 水平面と平行に回動可能な複数のロ−ラ20に車輪21を載置する。
前記車輪20のアライメントを測定するホイ−ルアライメント測定方法であること。
前記車輪20に連係するステアリングホイ−ル28を、そのステアリング機構のヒステリシス位置情報を基に所定角度回動する。
前記ステアリングホイ−ル28の所定角度回動位置でアライメント測定する。
(もっと読む)
エレベータのガイドレール据付精度測定装置
【課題】より精度の高いエレベータのガイドレール据付精度測定装置を提供する。
【解決手段】エレベータのガイドレール1aとかご2との変位距離を検出しガイドレール変位信号を出力するガイドレール変位検出手段101,102と、ガイドレールの昇降路内への据付時の位置の基準となる昇降路の頂部から底部まで垂下されたピアノ線7と、このピアノ線とかごとの間隔の変位距離を検出しかご変位信号を出力するかご変位検出手段103,104と、かご変位検出手段からのかご変位信号とガイドレール変位検出手段からのガイドレール変位信号からガイドレールの精度を演算して求める精度測定手段120と、を備えた。
(もっと読む)
超小型電子機構の所望寸法を測定するのに用いられる計測ツールにおける障害を識別する方法、該寸法を測定するのに用いられる計測ツールシステムにおける障害を識別する方法、及び、該システムにおける障害を識別するコンピュータプログラム(計測ツールエラーログ解析方法及びシステム)
【課題】超小型電子機構の所望寸法を測定するのに用いられる計測ツールシステムの障害を識別する方法を提供する。
【解決手段】システムの各計測ツールは超小型電子機構の所望寸法を測定するため、複数のレシピを実行し、各レシピは、超小型電子機構の少なくとも1つの寸法を測定するために一連の命令を含む。システムは、超小型電子機構寸法の測定の際に障害を記憶するエラーログを含む。方法は、計測ツールにより用いられたレシピに対して、正規化された数のエラーを、エラーログに記憶されている障害から決定する工程と、エラーログ内の最大の正規化された数のエラーを有する1つ以上のレシピを識別する工程と、最大の正規化された数のエラーを有する1つ以上の識別されたレシピを、測定ツールにより実行すべきジョブのリストにて識別する工程と、最大の正規化された数のエラーを有する1つ以上の識別されたレシピから1つ以上のレシピのエラーの原因を決定する工程とを含む。
(もっと読む)
有関節座標計測機再配置装置及び方法
対象物の周囲での再配置を容易化する計測装置、システム及び方法を提供する。本システムでは有関節座標計測機(CMM)(200)及びレーザトラッカ(400)を使用し、そのCMM上にはレーザトラッカと対をなすレトロリフレクタ(310,312)を配置する。共通の基準座標系による座標値にCMMによる計測値及びレーザトラッカによる計測値を変換できるためCMMを移動させることができる。更に、レーザトラッカでは計測できない隠れ点を有関節CMM等で計測することができる。  (もっと読む)
(もっと読む)
ワイヤ位置検出方法及びその装置
【課題】 シート状部材を切断しながらシート状部材の幅方向両端のワイヤの位置をそれぞれ検出することにより、切断面における両端のワイヤ間の長さを正確に求めることができるワイヤ位置検出方法及びその装置を提供する。
【解決手段】 磁性体のカッター130とそのカッター130からワイヤ301の長手方向に所定距離だけ離れた位置との間の磁気抵抗をカッター130とともに移動する磁気抵抗検出器140によって検出し、ワイヤ301と接触していないカッター130がワイヤ301と接触することにより磁気抵抗が変化したときのカッター130の位置と、ワイヤ301と接触しているカッター130がワイヤ301と接触しなくなることにより磁気抵抗が変化したときのカッター130の位置に基づいてシート状部材300の幅方向両端のワイヤ301の位置をそれぞれ検出する。
(もっと読む)
ワイヤ位置検出方法及びその装置
【課題】 低コストな装置でシート状部材の幅方向両端のワイヤの位置をそれぞれ検出することができ、シート状部材の幅方向両端のワイヤ間の長さを正確に求めることのできるワイヤ位置検出方法及びその装置を提供する。
【解決手段】 電磁ピックアップセンサ130がシート状部材300の幅方向に移動することにより、シート状部材300の表面におけるワイヤ301による前記磁気の変化を検出し、電磁ピックアップセンサ130から出力される電圧信号を整流して平滑化し、平滑化した電圧信号を検出したときの電磁ピックアップセンサ130の位置と、平滑化した電圧信号を検出しなくなったときの電磁ピックアップセンサ130の位置に基づいてシート状部材300の幅方向両端のワイヤ301の位置をそれぞれ検出する。
(もっと読む)
方位角計測装置および移動体
【課題】簡素で安価な構成でなおかつ精度の高い方位角計測装置を備えた移動体を提供する。
【解決手段】駆動車輪の回転速度を計測する駆動輪回転速度計測手段と、前記回転角速度推定値ωA312を出力できるジャイロセンサと、前記駆動輪回転速度からオドメトリによって前記回転角速度推定値ωBを計算する運動学演算手段と、前記回転角速度推定値ωA312と前記回転角速度推定値ωB412とを逐次選択する回転角速度推定値選択手段と、前記回転角速度推定値選択手段403の出力を積分する積分器404と、からなる移動体の方位角計測装置を構成し、前記回転角速度推定値選択手段403が常に信頼性の高い回転角速度推定値を出力するようにした。
(もっと読む)
媒体内に閉じ込められた対象物の位置探査用測定方法及び測定装置
本発明は、少なくとも1つの容量性高周波センサ(60)を用いて、第1の高周波検出信号を形成し、該第1の高周波検出信号は、検査すべき前記媒体に作用を及ぼし、従って、第1の高周波検出信号の測定及び評価によって、殊に、容量性のセンサ装置(60)のインピーダンス測定によって、媒体内に閉じ込められた対象物についての情報を得ることができる、媒体内に閉じ込められた対象物の位置探査用測定方法に関する。
本発明によると、媒体内に閉じ込められた対象物についての情報を得るために、少なくとも1つの別の第2の検出信号を評価する。
更に、本発明は、本発明の方法による測定装置(62)に関する。 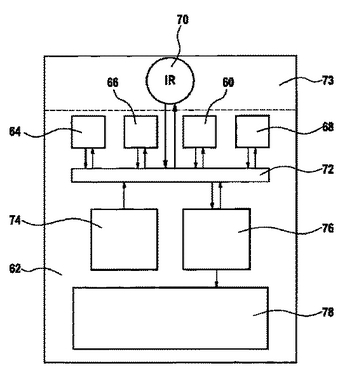 (もっと読む)
(もっと読む)
3次元形状データの位置合わせ方法および装置
【課題】対象物体の3次元計測を行って得られる3次元形状データの位置合わせに際し、ターゲットマークの対応の決定に当たってのロバスト性を向上させること。
【解決手段】対象物体の3次元計測を行って得られる3次元形状データについて対象物体に設けられたターゲットマークを利用して位置合わせを行うための方法であって、対象物体について写真測量を行い、ターゲットマークについての3次元位置であるターゲット座標TZgおよび法線ベクトルHVgを演算によって取得し、3次元計測によってターゲット座標TZsおよび法線ベクトルHVsを取得し、写真測量によって取得したターゲット座標TZgおよび法線ベクトルHVgと、3次元計測によって取得したターゲット座標TZsおよび法線ベクトルHVsとを用いて、これらのターゲット座標TZg,TZsの対応関係を決定し、その対応関係に基づいて3次元形状データの位置合わせを行う。
(もっと読む)
レースタイヤ摩耗予測方法及びレースタイヤ摩耗予測用コンピュータプログラム、並びにレースタイヤ摩耗予測装置
【課題】より正確にレース走行中のタイヤ摩耗予測を行うこと。
【解決手段】レース走行をする車両5に、処理部11と記憶部12とを有する制御部10を搭載する。また、処理部11には、表示モニタ17と入力部16と走行状態検出センサ15を接続し、さらに、タイヤ20の近傍に設けられた撮像部31を有する画像解析装置30を接続する。記憶部12では、入力部16からの入力によりレース走行前に摩耗データを記憶する。また、画像解析装置30で、レース走行中のタイヤ摩耗状態情報を取得し、走行状態検出センサ15によって走行状態を検出する。処理部11では、これらの情報と記憶された摩耗データとを演算してタイヤ摩耗速度を予測する。従って、レース走行中における走行状態に応じた、当該レース走行時のタイヤ20の摩耗予測をすることができる。この結果、より正確にレース走行中のタイヤ摩耗予測を行うことができる。
(もっと読む)
耳ゴム付着量測定方法及びその装置
【課題】測定時におけるセンサ移動に伴う振動を低減して測定精度の向上を図った耳ゴム付着量測定方法及びその装置を提供する。
【解決手段】スチールコーティング材料300による遮光量が非遮光時における全光量の約1/2となった位置で計測ユニット120A,120B及びレーザ光射出ユニット131A,131Bを停止し、受光器132A,132Bの受光量によってスチールコーティング材料300の側端位置を検出した後、磁気センサ164A,164Bを移動させてスチールコーティング材料300の最外側のスチールワイヤー部材301の位置を検知し、スチールコーティング材料300の側端位置とスチールコーティング材料の最外側のスチールワイヤー部材301の位置との間の距離を耳ゴム付着量として算出して表示する。
(もっと読む)
三次元ワーク測定方法
【課題】 厳格な位置決めを必要とせず、ワークを測定できる三次元ワーク測定方法を提供する
【解決手段】 測定対象であるワーク40を、測定用ロボット20により三次元測定するための三次元ワーク測定方法であって、ワーク40上に設定された基準点のうち一点を位置決めピン12aに位置合わせして、基準点を測定する第1測定工程(ステップS5、S9、S21〜S37)と、ワーク40と同様の基準点が設定された設計値通りの理想ワークを、該基準点のうちの一点を位置決めピン12aに合わせた所定の姿勢で配置したと想定して、該理想ワーク上の基準点とワーク40の基準点の測定結果とを比較する比較工程(ステップS38)と、比較結果に基づいて、ワーク40上の測定点を測定するための前記ロボットの測定位置を補正する補正工程(ステップS6、S10、S41)と、補正した測定位置から、ワーク40上の測定点を測定する第2測定工程(ステップS42〜S48)と、を有する三次元ワーク測定方法。
(もっと読む)
表面形状計測装置
【課題】走査に用いる走査系の運動誤差を除去できる形状計測装置を提供する。
【解決手段】本発明の形状計測装置は、走査系を構成している回転スピンドル112及び直動スライド142と、スライド142上に設置されている変位センサ類で構成されている。回転スピンドル112により、計測試料120とその外周に設けられた補助試料114とが回転している。直線上に動く直動スライド142上では、計測試料形状計測用変位プローブ132と、その両側に補助試料114の表面形状及び走査系の運動誤差を計測できる2台の変位センサ134,136を設置している。試料外周部に設けた補助試料114を変位センサ134,136で2点測定して、表面形状を求めておくことにより、直動スライド142の真直度誤差、回転スピンドル112の回転運動誤差、熱膨張などによる系統誤差を全て除去できるようにしている。
(もっと読む)
変位計の位置計測方法および位置計測装置
【課題】 小形軽量で、狭隘な設置スペ−スに設置できるとともに、計測器等の修理や部品交換に容易に応じられる、変位計の位置計測方法および装置を提供する。
【解決手段】 距離計測手段30を介し、最先の一対の変位計28の両端部と、その枢支部27の少なくとも3位置の三次元位置を基準値として計測する。 前記一対の変位計28の折れ角の初期値を演算する。 この後、前記変位計28に一対の変位計28を順次連結して延伸する。 その際前記距離計測手段30を介して、延伸した一対の変位計28の両端部と、その枢支部27の少なくとも3位置の三次元位置を計測する。 前記延伸した一対の変位計28の折れ角を算出する。 前記折れ角と、延伸した変位計28の枢支部27における三次元位置と、延伸に伴ない変化する先行の折れ角を相対量として検出する。 前記検出角度と変位計28の長さを基に、最先または所望の変位計28の位置を演算する。
(もっと読む)
デュアル光音響および抵抗測定システム
ウエハの性状を測定するための測定システムは、4点プローブシステム等の伝導率測定を実行するための装置を、光音響測定システム等の光学測定を実行するための装置と組み合わせたものである。薄膜基板の性質を記述した包括的なデータセットを提供するために、結果が取得され組み合わせられる。 (もっと読む)
操舵角検出装置
【課題】 後進時にも正確な操舵角を検出できる操舵角センサを提供すること。
【解決手段】 車両のヨーレイトを検出するヨーレイト検出手段と、操舵可動領域を複数の領域に分割し、それぞれの領域内で操舵角に応じた第1の値を出力する複数のセグメントと、ヨーレイト検出手段により検出されたヨーレイトと、セグメントの出力する第1の値との関係に基づいて、操舵角の存在するセグメントを特定するセグメント特定手段と、セグメントから出力された第1の値と、前記セグメント特定手段により特定されたセグメントから操舵角を検出する操舵角演算部と、を備えた操舵角検出装置であって、セグメント特定手段は、右転舵時におけるヨーレイトと第1の値との関係からセグメントを特定する右転舵エリアと、左転舵時におけるヨーレイトと第1の値の関係からセグメントを特定する左転舵エリアとを有し、車両の前後進時にセグメントを特定する手段とした。
(もっと読む)
間口の寸法測定装置
【課題】 探触子の接地の際、手ぶれにより測定誤差が発生せず、また敷居/鴨居/柱に養生材が貼り付けられたままで、間口の実寸法を測定する装置を提供すること。
【解決手段】 雲台を有する三脚と、雲台に取り付けられる寸法測定装置本体と、寸法測定装置本体にワイヤーで結合される探触子とを具備し、上記寸法測定装置本体は、雲台に取り付けられる基台と、基台の水平方向に植設された固定軸に回動自在に設けられた回転台と、基台に対する回転台の回動角度を検出するロータリ・エンコーダと、基台から測定点まで長さを検出するリニア・エンコーダと、検出した角度および長さのデータを格納する記憶手段とを具備し、また、探触子は、自在に回動するリンクに結合された先端部と、先端部に対して左右に回動するクランクと、ワイヤーとともに回動する受光手段とを具備するものである。
(もっと読む)
121 - 140 / 174
[ Back to top ]