
Fターム[2F069NN02]の内容
測定手段を特定しない測長装置 (16,435) | 信号処理 (1,324) | フィルタリング (75)
Fターム[2F069NN02]の下位に属するFターム
Fターム[2F069NN02]に分類される特許
1 - 20 / 55
表面形状の特徴形状抽出演算方法、及び表面形状補正演算方法

【課題】 様々な表面形状に対して比較的に容易に適用可能な特徴形状抽出演算方法及び表面形状補正演算方法を提供することを目的とする。
【解決手段】 この方法は、表面形状測定装置によって測定された被測定物の表面形状を表わす表面形状測定データ点群から、該被測定物の表面形状の所要の特徴形状を表わす特徴形状データ点群を抽出する特徴形状抽出演算方法であって、前記表面形状測定データ点群によって構成される仮想表面に接触可能な二次元もしくは三次元の形状を有する仮想接触子を想定し、前記仮想表面における複数の異なる位置において該仮想接触子を該仮想表面に接触させたことを仮想したときに、各位置において該仮想接触子が接触する前記仮想表面上の1以上の接触点における前記表面形状測定データ点群の中のデータ点を抽出して前記特徴形状データ点群とする特徴形状抽出演算方法である。
(もっと読む)
状態検出装置、電子機器及びプログラム

【課題】 平均加速度、基準平均加速度及び基準歩幅に基づく処理を行うことで、歩幅の推定精度を高める状態検出装置、電子機器及びプログラム等を提供すること。
【解決手段】 状態検出装置100は、加速度センサー10からの加速度検出値を取得する取得部110と、加速度検出値に基づいて、所与の期間ごとの平均加速度を算出する平均加速度算出部162と、基準平均加速度と基準歩幅を取得する基準情報取得部164と、基準平均加速度に対する平均加速度の比、前記基準歩幅に基づいて、歩幅を推定する歩幅推定部160を含む。
(もっと読む)
表面形状測定用触針式段差計及び該段差計における測定精度の改善方法
【課題】表面形状への追随性が良く、かつ、変位雑音が小さい表面形状測定用触針式段差計及び該段差計における測定精度の改善方法を提供する。
【解決手段】変位センサ20の磁性体コアに固有雑音の小さい強磁性体のコアを使用し、低雑音の差動トランスとして形成し、低雑音の差動トランスの出力を、低雑音のデジタルロックインアンプで計測し、変位の測定結果からセンサ20の固有振動に起因する雑音を、低域通過フィルターを用いて移動平均法で除去し、低域通過フィルターの遮断周波数を通常の15Hz程度よりも高くする。
(もっと読む)
表面性状測定機
【課題】測定時間の短縮が図れる表面性状測定機を提供する。
【解決手段】被測定物Wを載置する回転テーブル20と、被測定物の表面性状に応じた信号を発する検出手段30と、回転テーブルおよび検出手段を相対移動させる検出器駆動機構40と、検出手段からの信号を取り込み、この取り込んだ信号を処理して被測定物の形状や表面粗さなどの表面性状を求める処理装置60とを備える。検出手段は、複数の検出器31,32を含んで構成される。処理装置60は、複数の検出器31,32からの信号を順番に取り込んで処理する。
(もっと読む)
変位センサシステムに適用する拡張ユニット
【課題】センサシステムを構成するアンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能なセンサシステムに適用される拡張ユニットを提供すること。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
(もっと読む)
枕木変位計測システム
【課題】枕木の変位量を簡単に計測でき、変位量から道床・路盤の状態を客観的に判定することができるため、軌道の保守点検作業においてより一層の効率化および信頼性の向上を図ることができる枕木変位計測システムを提供する。
【解決手段】レールを締結固定する枕木に沿った水平方向と、レールに沿った垂直方向と、これら2つの方向に直交する重力方向との三軸方向の加速度を検出する三軸加速度検出手段と、その検出結果における不要な(衝撃・定常)成分を除去するフィルタと、この不要な成分を除去されたデータに対し、積分演算を施して枕木の変位量を算出し、その変位量から必要変位波形を抽出して得た必要変位波形から最大変位量を算出する手段とを具備する変位量測定装置を設け、列車が通過する際の列車全体に対する枕木の変位波形および変位の最大値、変位に伴う三軸方向の最大加速度を計測可能とした。
(もっと読む)
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。 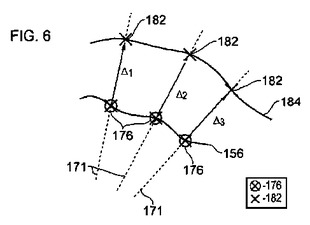 (もっと読む)
(もっと読む)
パターン化された構造を測定するための方法およびシステム
パターン化された構造の少なくとも1つのパラメータの測定で使用するための方法およびシステムが提供される。方法は:構造の異なる位置上の測定に対応する複数の測定された信号を含む測定されたデータと、理論的信号と測定された信号との間の関係は、構造の少なくとも1つのパラメータを示す理論的信号を示すデータとを含む入力データを提供する過程と;構造の少なくとも1つの性質を特徴付ける少なくとも1つの選択されたグローバルパラメータに基づきペナルティ関数を提供する過程と;フィッティングプロシージャの前記実行は、理論的信号と測定された信号との間の最適化された関係を決定するために前記ペナルティ関数を使用することと、構造の前記少なくとも1つのパラメータを決定するために最適化された関係を使用することとを含む、理論的信号と測定された信号との間のフィッティングプロシージャを実行する過程と;からなる。 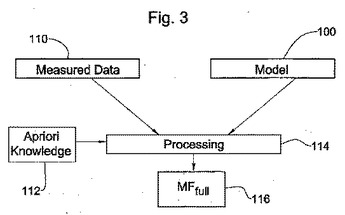 (もっと読む)
(もっと読む)
慣性測定法による軌道検測装置の低速時精度補償方法及びその装置
【課題】 軌道検測車の低速走行時における慣性測定法の精度低下を補償し、測定下限速度を引き下げることができる慣性測定法による軌道検測装置の低速時精度補償方法及びその装置を提供する。
【解決手段】 慣性測定法による軌道検測の低速時精度補償装置において、慣性測定で得られる加速度・角度・変位の信号を位相補償・波形変換器6で得て、軌道検測車1の低速時には位相補償・波形変換器6から分岐して低速時精度補償部8によって演算し、軌道検測車1の低速時における出力として軌道狂いを計測する。
(もっと読む)
レール車両の、少なくとも一つの輪軸を有している台車の状態を監視するための方法
本発明は、レール車両の、少なくとも一つの輪軸(4)を有している台車(3)の状態を監視するための方法に関する。本方法では、輪軸(4)の車輪(8)は軸(6)によって固く結合されており、且つ、ほぼ円錐形の車輪輪郭を有しており、台車に配置されているセンサ手段(10)から供給される信号から、車輪(8)の円錐形の車輪輪郭を基礎としている、台車(3)の輪軸(4)の蛇行動に対応する信号がフィルタリングされて取り出され、蛇行動の周波数(f)が、その都度存在している車両速度(v)のような周囲条件を基準にして求められ、蛇行動の周波数(f)に関して記憶されている、存在している周囲条件に対して典型的な値又は値領域と比較され、測定された前記周波数(f)の、該周波数(f)に関して記憶されている値又は値領域からの偏差が監視される。 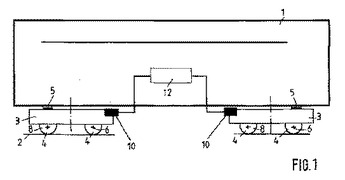 (もっと読む)
(もっと読む)
動き検出装置および方法
【課題】 動き検出装置および方法を提供する。
【解決手段】 1つ以上の第1回転角測定センサを用いて第1角を測定し、1つ以上の第2回転角測定センサおよび前記1つ以上の第1回転角測定センサと相違する1つ以上の2軸の角速度センサを用いて第2角を推定し、1つ以上の第3回転角測定センサおよび前記1つ以上の2軸の角速度センサを用いて前記2軸のうちのいずれか1つである第3角を推定する動き検出装置を提供する。
(もっと読む)
角度測定の方法およびそれを実施するための角度測定ジャイロシステム
【課題】検出信号のノイズ、ドリフトを最小にする角度測定の方法を提供する。
【解決手段】既定の算出され推定された一組のパラメータに基づいて一組の推定された信号を算出するために状態観測器231を構成し、ジャイロスコープ21に関連した動的方程式を使用してそのゲインを算出し、算出されたゲインに基づいて、推定された一組のパラメータを算出する。一組の検出信号は、検出モジュール22によって生成され、これと推定された一組のパラメータから推定された信号が算出される。また、状態観測器231によって算出された推定されたパラメータにおける位置および速度に基づいて前記ジャイロスコープ21の回転角φを算出するための角度計算機233とを含む。
(もっと読む)
路面バンク角推定装置
【課題】車輪に路面から作用する力を検出するための力センサを必要とすることなく、安価な構成で、路面のバンク角を安定に推定する。
【解決手段】車輪と路面との間の摩擦特性モデルを含む車両モデルを用い、水平面上での車両横力モデル推定値Fgy_total_estmを求めると共に、これを車両質量mで除算してなる横加速度モデル推定値Accy_estmを求める手段と、横加速度モデル推定値Accy_estmと横加速度センサ15の出力が示す横加速度検出値Accy_sensとの偏差を求める手段と、該偏差から路面のバンク角の暫定推定値を求め、該暫定推定値をハイカット特性のフィルタに通すことにより路面のバンク角推定値θbank_estmを求める手段とを備える。
(もっと読む)
幾何学的タイヤ測定値のデータ品質を向上させるフィルタリング処理方法
タイヤ測定システムが生のタイヤ測定データ及び変換タイヤ測定データ(例えば、測定された半径方向又は側方回転振れ値のデータセット)をストレージする種々のメモリ/メディア要素並びにコンピュータ実行可能命令の形態をしたソフトウェアを搭載したコンピュータを含み、コンピュータ実行可能命令をプロセッサによって実行し、それにより、得られたデータセットに含まれていて、隣り合う測定値を超えて突き出ている選択された回転振れ値をフィルタリング処理し、フィルタリング処理済み回転振れ値のうちで、かかる値セット全体を包囲している凸包上に位置する選択されたフィルタリング処理済み回転振れ値を識別し、凸包上に位置する回転振れ値のうちの識別された選択回転振れ値の補間を実行してフィルタリング処理済み回転振れ測定値の最終データセットを得る。逆データセットに対して同様なステップを実行してサイドウォール変形特徴部、例えばサイドウォール窪みを一層適切に検出する。 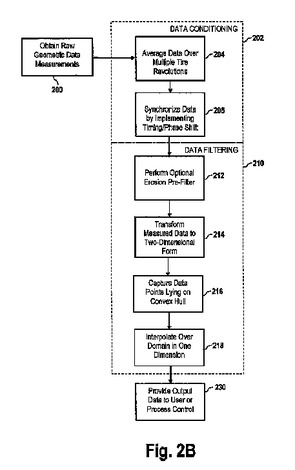 (もっと読む)
(もっと読む)
ウェブ基準を使用して位相固定したウェブ位置信号
ウェブの移動エンコーダ信号を検知したウェブ基準信号に位相固定すること含む、ウェブ位置の決定を向上させるための手法。基材の長手方向軸に沿って配置された基準が検知され、対応するセンサ信号が生成される。推定ウェブ位置は、1つ以上のエンコーダ信号によって提供される。センサ信号とエンコーダ信号との間の位相差が計算され、位相差に基づいてウェブ位置の誤差が決定される。ウェブ位置の誤差信号は、ウェブ位置の決定の精度を向上させるエンコーダ信号を調整するためにフィードバックすることができる。  (もっと読む)
(もっと読む)
姿勢検出装置の補正パラメーター作成方法、姿勢検出装置の補正パラメーター作成用装置及び姿勢検出装置
【課題】センサーの取付角誤差に起因する検出値の誤差を補正するための補正パラメーターをより低コストで作成可能な姿勢検出装置の補正パラメーター作成方法、補正パラメーター作成用装置及び補正機能付きの姿勢検出装置を提供すること。
【解決手段】回転板230を上面231が水平になるように設置し(S10)、立方体治具210の面211に、X軸(第1の軸)が面212(第2の面)に垂直になり、Y軸(第2の軸)が面213(第3の面)に垂直になり、Z軸(第3の軸)が面211(第1の面)に垂直になるように、姿勢検出装置1を固定する(S12)。そして、立方体治具の面212、213、211と対向する各面を回転板の上面に順次固定し(S14、S20、S26)、回転板を静止又は所定の角速度で回転させて姿勢検出装置の検出値を取得し(S16、S18、S22、S24、S28、S30)、補正パラメーターを作成する(S32)。
(もっと読む)
バンク角制限装置
【課題】車両の挙動量が大きく変化する場合、あるいは、カーブが逆バンクである場合に、推定バンク角を制限して、該推定バンク角の値が不安定に陥らないようにする。
【解決手段】バンク角制限装置10Aは、ローパスフィルタ16を備えるローパスフィルタ部12と、車両の挙動量が所定の閾値よりも大きいか否かを判定する車両挙動判定部14とを有し、ローパスフィルタ部12は、前記挙動量が前記閾値よりも大きいと車両挙動判定部14が判定したときに、前記車両に搭載されたバンク角推定装置が推定した路面の推定バンク角をローパスフィルタ16を介して出力し、一方で、前記挙動量が前記閾値以下であると車両挙動判定部14が判定したときに、前記推定バンク角を直接出力する。
(もっと読む)
真直度測定方法及び真直度測定装置
【課題】 3個の変位計のゼロ点調整を高精度に行うことなく、測定対象物の表面プロファイルを算出することができる真直度測定方法を提供する。
【解決手段】 第1の方向に並び、相対位置が固定された3個の変位計と、測定対象物との一方(可動物)を他方(固定物)に対して第1の方向に移動させながら、3個の変位計から、それぞれ測定対象物の表面において第1の方向に延在する測定対象線に沿って並ぶ3つの被測定点までの距離を測定する。3個の変位計の測定結果に基づいて、可動物に対する相対位置が固定された基準点の軌跡である倣い曲線のプロファイルを算出する。倣い曲線の算出されたプロファイルの2次成分を、事前に測定されている倣い曲線のプロファイルの2次成分に基づいて補正する。補正された倣い曲線のプロファイルに基づいて、測定対象物の表面のプロファイルを算出する。
(もっと読む)
真直度測定方法及び真直度測定装置
【課題】 測定対象物の表面プロファイルを、容易に算出することができる真直度測定方法を提供する。
【解決手段】 第1の方向に並ぶ3個の変位計と、測定対象物との一方(稼動物)を他方(固定物)に対して第1の方向に移動させながら、3個の変位計から、それぞれ測定対象物の表面において第1の方向に延在する測定対象線に沿って並ぶ3つの被測定点までの距離を測定する。測定対象線に沿う表面プロファイル、可動物に固定された基準点の軌跡である倣い曲線のプロファイル、及び可動物の移動に伴うピッチング成分のプロファイルうち、2つのプロイファイルで規定される解の候補を複数個決定する。表面プロファイル、倣い曲線のプロファル、及びピッチング成分のプロファイルうち、解の候補に規定されていないプロファイルに基づいて定義される評価関数の値を適応度として、複数の解の候補に遺伝的アルゴリズムを適用し、最も適応度の高い解の候補を抽出する。
(もっと読む)
軌道位置データ付与システム及び軌道位置データ付与方法
【課題】軌道上を走行する車両に設置されたセンサから時系列的に出力される検査値データを軌道位置データと対応付けるのに際して、少ない処理で簡単に行うことができるようにする。
【解決手段】検査値データと同期して、車両上に設置された角速度センサによってヨー角速度を表す角速度データを順次取得して検査値データと共に時系列的に保存し、前記保存した角速度データの中で処理するべき範囲である処理区間を必要に応じて決定し、処理区間における角速度データと軌道管理図の曲線線形図とを比較することにより、処理区間における角速度データと軌道管理図の軌道位置データとの対応付けを行い、軌道位置データと対応付けられた角速度データに基づき、該角速度データと同期する検査値データを該軌道位置データと対応付ける。
(もっと読む)
1 - 20 / 55
[ Back to top ]