
Fターム[2F103CA08]の内容
Fターム[2F103CA08]に分類される特許
1 - 20 / 151
光ファイバセンサ
【課題】光干渉信号出力をセンサ信号とするセンサには、構成が簡単で、センサ部分の無電源化が可能なホモダイン干渉方式があるが、安定な動作を得るには、使用部品に対し厳しい工作精度と熱膨張対策が必要であると共に、センサ信号として変動できる位相範囲は±90度以内に限られていた。
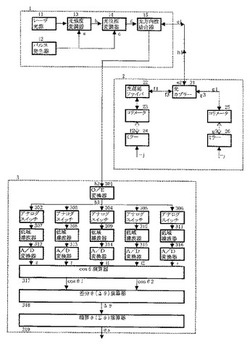
【解決手段】干渉計の入力を周期性光パルスとし、参照光パルスの前半と後半で位相を90度(直交位相)異なる位相とし、計測光パルスと干渉させることにより、90度異なる2つの干渉出力値i1、i2を得て、その参照光と計測光の値r、sとから、参照光と計測光の位相差をθとして、2つの余弦値cosθ1、cosθ2を算出して余弦曲線上に位置を定め、その角度θ1、θ2を求めることによって、干渉光の強度変動、位相動作点変動の影響を除外するとともに、1周期前との角度の差分を積算して、センサ出力とすることにより、センサ信号として変動できる位相範囲が、±90度(半波長)を超えることを許容する光ファイバセンサを提供する。
(もっと読む)
光ファイバセンサとこれを用いた測定方法

【課題】所望位置へ簡単に配設でき安価に実施できるうえ、配管など被測定物の歪や温度等を長期にわたって正確に測定できるようにする。
【解決手段】光ファイバセンサ(1)は、光ファイバ(2)と、その周囲に配置された連続繊維(3)と、連続繊維(3)に含浸された結合剤とを備える。光ファイバ(2)は、中間部を連続繊維(3)で製紐された筒状の紐体(5)内に収容してある。紐体(5)の内周長は光ファイバ(2)の外周長よりも長く、一部が光ファイバ(2)の外周面に当接され、残部が紐体(5)の内周面同士で互いに当接してある。紐体(5)の外周面に、紐体(5)の長さ方向に延びた着座面(16)が形成してある。着座面(16)を被測定物(14)の表面へ当接した状態で、固定部材(17)で光ファイバセンサ(1)を被測定物(14)側へ押圧して固定する。光ファイバ(2)の端部に測定器(15)を接続して、被測定物(14)の歪や温度を測定する。
(もっと読む)
光ファイバセンサとこれを用いた測定方法、および光ファイバセンサを備えたコンクリート構造物
【課題】所望位置へ簡単に配置でき安価に実施できるうえ、コンクリート構造物の歪や温度等を簡単に且つ正確に測定できるようにする。
【解決手段】光ファイバセンサ(1)は、光ファイバ(2)と、その周囲に配置された連続繊維(3)と、連続繊維(3)に含浸された結合剤とを備える。光ファイバ(2)は、長さ方向の中間部が、連続繊維(3)で製紐された紐体(5)により被覆してある。光ファイバ(2)には、紐体(5)で覆われた部位に1又は複数のFBG(9)が形成してある。光ファイバ(2)の端部をコンクリート構造物(14)の表面に取り出した状態で、コンクリート構造物(14)の内部に、光ファイバセンサ(1)の中間部を一体的に埋設する。取り出された光ファイバ(2)の端部に測定器(15)を接続して、コンクリート構造物(14)の歪や温度を測定する。
(もっと読む)
位置検出方法及び装置、エンコーダ装置、並びに露光装置
【課題】回折格子を用いて相対移動量を計測する際に、格子パターン面の法線方向の絶対位置を検出する。
【解決手段】原点検出装置11Xは、第1部材6に設けられ、X方向を周期方向とする反射型の回折格子12Xと、第1計測光MX1を回折格子12Xに第1の入射角で入射させ、回折光と第1参照光MR1との第1干渉光を検出する第1干渉ヘッド14Xと、第3計測光MX3を回折格子12Xにその第1の入射角と異なる第2の入射角で入射させ、回折光と第3参照光MR3との第3干渉光を検出する第2干渉ヘッド15Xと、その第1、第3干渉光の検出信号からZ方向の相対位置を求める第3演算部41Cと、を備える。
(もっと読む)
露光装置、及びデバイス製造方法
【課題】移動体の位置情報を精度良く計測できる位置計測装置を提供する。
【解決手段】位置計測装置は、移動面内を移動する移動体の位置情報を計測する。位置計測装置は、移動体の第1面に配置された移動格子に光を照射する光源と、光源との位置関係が固定で、移動格子で回折された光が入射する第2面を有し、入射した光を回折又は反射して移動格子に戻す固定光学部材と、移動格子を再度介して干渉された光を検出する検出装置と、を備え、第1面と第2面とはほぼ平行である。
(もっと読む)
反射型センサ
【課題】 遮光手段を用いずに光源からの発散光がパッケージの外界との境界面で全反射して、受光素子に入射することを防止する。
【解決手段】 光線L0は発光素子23から出射した光線のうち、境界面53で屈折して透過し反射スケール21で反射し、最後に受光領域S2に導かれる光線群であり、この光路がセンサ信号を得るための有効光となる。光線Laは境界面53で全反射してパッケージ内を伝搬する光線であり、この光線Laはセンサ信号光とは無関係なノイズ光であり、受光すべきでない光線である。この光線Laが受光領域S2に入射すると、センサ信号のS/Nが低下してしまうことになる。また、光線Lbは境界面53を挿通し反射スケール21に至ることなく、外方に出射してしまうので、精度等に対する影響は殆どない。不要な光線Laが受光素子24の受光領域S2に入射しないように、発光素子23の発光領域S1を基準として、受光領域S2を決定する。
(もっと読む)
光学エンコーダの利得とオフセットを動的に調整する方法
【課題】光学エンコーダの利得とオフセットを動的に調整する。
【解決手段】光学エンコーダにおける利得とオフセットを動的に調整する方法は、回折格子を含むエンコーダ・ディスクを提供する段階と、前記エンコーダ・ディスクに光を照射する段階と、前記回折格子から回折された光を検出しかつ第1の細カウント・チャネルを出力するように構成された検出器を提供する段階と、前記第1の細カウント・チャネルの第1のターゲット利得と第1のターゲット・オフセットを計算する段階と、前記第1のターゲット利得と第1のターゲット・オフセットに基づいて、前記第1の細カウント・チャネルからサンプリングされたデータに補正を適用する段階と、を含む。
(もっと読む)
干渉計方式により間隔測定するための機構
【課題】十分に平行に配設された二つのプレート間で、高精度で干渉計方式により間隔測定するための機構を提供する。
【解決手段】光源3.1から発せられた光束が、第一プレート1にある分光器要素1.2に傾斜して当たり、そこで反射される参照光束と透過する測定光束に分割される。測定光束は第二プレート2にあるリフレクタ要素2.2に当たり、そこで第一逆反射を受ける。参照光束は第一屈折要素3.2aを、測定光束は第二屈折要素3.2bを通過し、二つの光束は引き続いて、それぞれ関連配置された逆反射器3.3を通過して、測定光束は第三屈折要素3.2cを、参照光束は第四屈折要素3.2dを通過する。そして参照光束は第一プレート1で反射を、測定光束は第二プレート2のリフレクタ要素2.2で第二逆反射を受け、それにより二つの光束が、共直線で検知ユニット3の方向に伝播し、そこで位相がずれた複数の走査検知信号を生成することができる。
(もっと読む)
エンコーダ装置、及び装置
【課題】基準位置を高精度に検出する。
【解決手段】エンコーダ装置は、基準位置を示す基準位置パターンと位置情報パターンとを有するスケールと、スケールに光を照射する光源と、光を変調させる変調信号を生成する変調部と、変調信号に基づいて変調された変調光によって位置情報パターンを検出した位置情報信号に基づいて、スケールの位置情報を検出する位置情報検出部と、変調光によって基準位置パターンを検出した検出信号を出力する基準位置受光部と、検出信号に基づいて、基準位置を検出する基準位置検出部と、を備え、基準位置検出部は、光を変調することによって生じる基準位置の変位を補正する補正部を備える。
(もっと読む)
信号処理装置及び計測装置
【課題】安価で信頼性の高い信号処理装置を提供する。
【解決手段】被計測物の変位に応じた複数の周期信号に基づいて、前記変位に係る波数および位相の組み合わせを得る信号処理装置であって、前記複数の周期信号のサンプリング毎に該複数の周期信号から位相を得る第1手段と、サンプリング毎に前記第1手段により得られた位相に基づく波数および位相の組み合わせに対して回帰演算を行うことにより、サンプリング間隔における前記位相の変化量を得る第2手段と、第1サンプリングでの前記組み合わせに前記変化量を加算して第2サンプリングでの前記組み合わせを予測する第3手段と、前記第1手段により得られた前記第2サンプリングでの位相から、前記第3手段により予測された前記組み合わせの予測誤差を得る第4手段と、前記第3手段により予測された前記組み合わせに前記予測誤差を加算して前記第2サンプリングでの前記組み合わせを得る第5手段とを有する。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】光学系の高さを低くするとともに、回折格子からの0次光の影響を低減して計測精度を向上する。
【解決手段】X軸のエンコーダ10Xは、第1部材6に設けられ、X方向を周期方向とする回折格子12Xと、可干渉性のある計測光MX1及び参照光RX1を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1を回折格子12Xに向けてリトロー角から所定角度ずれた角度で反射する傾斜ミラー32XAと、回折格子12Xからの回折光と参照光RX1との干渉光を検出する光電センサ40XAと、光電センサ40XAの検出信号を用いて第1部材6に対する第2部材7のX方向の相対移動量を求める計測演算部42Xと、を備える。
(もっと読む)
遠隔から非接触でビーム発射および信号検知を行う受動読取ヘッドを有する光学式エンコーダ
【課題】受動読取ヘッドを有する光学式エンコーダを提供する。
【解決手段】受動読取ヘッドは、接続ケーブルを有さず、ただの光学式読取ヘッドである。スケールに対する相対位置を示す測定位置情報は、遠隔随伴部に通じる見通し線によって遠隔的に読み取られる。遠隔随伴部は、光源と、検出部と、を備える。検出部は、遠隔レンズ部と、光検出機構部と、を有していてもよい。遠隔随伴部は、受動読取ヘッドから得られる像領域の輝度(明暗)を光学的に検知し、検知した輝度(明暗)に基づいて、測定位置を示す複数の信号を出力する。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転が規制された非回転体であるエンコーダ本体2aと、エンコーダ本体2aに回転自在に軸支された回転体である回転軸3とを有し、エンコーダ本体2aに対する回転軸3の相対的な回転角度を検出する相対的角度検出手段としてのロータリエンコーダ2と、エンコーダ本体2aの絶対的な回転角度を検出する絶対角度検出手段としての非接触角度検出手段20とを備える。これにより、ロータリエンコーダ2が検出した回転角度を、非接触角度検出手段20で検出した回転角度に基づいて補正することができ、回転角度を高精度且つ短時間で測定することが可能となる。
(もっと読む)
変位センサ
【課題】一次元のスケール格子に対するスケール光結像系の二次元の変位を検出でき、構造が簡単な変位センサを提供する。
【解決手段】X方向に配置されたスケール格子110から結像系190にZ軸にほぼ平行なスケール光成分OP1A、OP1Bを射出し、Z方向に平行な光路OP1に沿って伝播した当該スケール光成分を受光した検出部201は、X方向の変位を示す変位信号を出力し、スケール格子110から結像系190にZ軸から傾いた方向にほぼ平行にスケール光成分OP2A、OP2Bを射出し、Z方向から傾いた光路OP2に沿って伝播した当該スケール光成分を受光した検出部202は、X方向の変位とZ方向の変位とを含む変位信号を出力する。
(もっと読む)
位置測定装置
【課題】位置測定装置における可動部材をできる限り他の部材と機械的に接続せずに成る高精度の位置測定装置を提供すること。
【解決手段】検出ユニット20と信号ユニット30を構造的に分離されたユニットとして形成し、検出ユニット20を測定標準10に対して少なくとも1つの測定方向xに沿って変位可能に配置し、光源から照射されるビームを信号ユニット30から検出ユニット20の方向へ照射し、少なくとも1対の部分ビームを検出ユニット20から信号ユニット30の方向へ照射し、検出ユニット20及び信号ユニット30を互いに平行な平面内に配置し、信号ユニット30と検出ユニット20の間におけるビームの少なくとも一部の拡がり方向を前記平面に対して垂直に配向するよう構成した。
(もっと読む)
エンコーダ及び校正方法
【課題】ポリゴンミラーなどの静止物体の校正に使用されるエンコーダに有用な技術を提供する。
【解決手段】光源と、マークが一定のピッチで配列され相対移動するスケールと、スケールのピッチによって決定される周期の整数分の一の大きさの周期で偏光方向が回転する直線偏光を生成する光学系と、生成された直線偏光を第1直線偏光と第2直線偏光とに分割する分割部と、固定配置された第1偏光板を含み、スケールが相対移動する間における、第1偏光板を通過した第1直線偏光の偏光方向の回転の数を得る第1ユニットと、直線偏光の偏光方向に対して回転する第2偏光板を含み、スケールが静止したときにおける第2直線偏光の偏光方向を検出することによってスケールが静止したときにおける直線偏光の1回転内の位相を得る第2ユニットと、第1ユニットおよび第2ユニットにより得られた結果を統合してスケールの移動量を出力する出力部と、を備える。
(もっと読む)
変位検出装置
【課題】高い回折効率を示し、精度良く位置検出を行える変位検出装置を提供することを目的とする。
【解決手段】台形または矩形のレリーフ形状をした回折格子を用いる。また、可干渉光を出射する光源部と、光源部から出射された光束を二つの光束に分割する光束分割部と、を含み、二つの光束をP偏光として回折格子上に照射させる照射光学系と、二つの光束が回折格子により回折されることによって生じる二つの第1回折光をそれぞれ反射し、回折格子上にP偏光として再入射させる反射光学系を備える。また、回折格子に再入射した二つの第1回折光が回折されて生じる二つの第2回折光を干渉させる干渉光学系と、干渉光学系により干渉した光を受光する受光部と、受光部において取得した干渉信号に基づいて、回折格子の位置情報を検出する位置検出部を備えるものとする。そして、回折格子のレリーフの周期を、回折格子に入射する可干渉光の波長の1.5倍以下とする。
(もっと読む)
干渉計測装置
【課題】調整の容易な干渉計測装置を提供する。
【解決手段】撮像素子が受光した全体領域から第1および第2部分領域を抽出し、抽出された第1および第2各部分領域で受光した干渉光の強度を複数の時刻で取得し、各時刻における前記強度のうちの一方および他方をそれぞれX座標値およびY座標値としたときのY座標値の最大値と最小値との差分を第1差分Aとして算出し、X座標値およびY座標値の組み合わせのデータを一次関数で近似した場合の傾きαを算出し、この傾きがゼロとなるようにXY座標系を回転し、回転後のXY座標系におけるY座標値の最大値と最小値との差分を第2差分B’として算出し、δ=asin{(B’/cosα)/A}で表される角度δを算出し、当該角度δを干渉光の位相分布の均一性を示す指標として決定する。
(もっと読む)
計測方法、ステージ装置、及び露光装置
【課題】周囲の気体の屈折率変動の影響を低減させて、ステージの位置決め精度等を向上できる露光装置である。
【解決手段】投影光学系(PL)を介してウエハステージ(WST)上のウエハ(W)に露光用の照明光を照射して、ウエハ(W)に所定のパターンを形成する露光装置であって、ウエハステージ(WST)に設けられたスケールと、このスケールの位置情報を検出する複数のXヘッド(66)と、複数のXヘッド(66)を一体的に支持し、線膨張率がウエハステージ(WST)の本体部よりも小さい計測フレーム(21)と、複数のXヘッド(64)の検出結果からウエハステージ(WST)の変位情報を求める制御装置とを備える。
(もっと読む)
干渉型光ファイバセンサシステム
【課題】信号の復調を可能とする位相変化速度を向上する。
【解決手段】パルス光を出力するパルス光源1と、物理量を検知するセンシングファイバ11a、およびセンシングファイバ11aと伝搬遅延時間(τd)が等しい遅延補償ファイバ30aを有し、パルス光源1からのパルス光を干渉させる干渉計5と、干渉計5からの干渉光をサンプリングして物理量に対応する信号φを検出する検出部と、を備え、パルス光源1は、センシングファイバ11aにパルス光が入力してから出力されるまでの伝搬遅延時間(τd)より短い周期で、パルス光を出力し、検出部は、センシングファイバ11aの伝搬遅延時間(τd)より短い周期で、干渉光をサンプリングする。
(もっと読む)
1 - 20 / 151
[ Back to top ]