
Fターム[2F112DA25]の内容
Fターム[2F112DA25]に分類される特許
121 - 140 / 559
光学式計測装置及びその干渉計用プリズム。
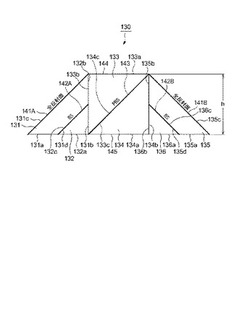
【課題】ゴーストのない高精度な光干渉観測を可能にする。
【解決手段】第1の台形プリズム131、第1の直角プリズム132、第2の直角プリズム133、第3の直角プリズム134、第2の台形プリズム135、第4の直角プリズム136を貼り合わせて一体化した構造のプリズムユニットを用いる。上記第1の台形プリズムの互いに平行な二つの面の一方の面にビームスプリッタ膜が形成され、上記ビームスプリッタ膜を挟んで上記面が上記第1の直角プリズムの斜面に貼り合わされ、上記第2の台形プリズムの互いに平行な二つの面の一方の面にビームスプリッタ膜が形成され、上記ビームスプリッタ膜を挟んで上記面が上記第4の直角プリズムの斜面に貼り合わされている。また、上記第2の直角プリズム及び第3の直角プリズムは、各斜面の一方の面に偏光ビームスプリッタ膜が形成され、上記偏光ビームスプリッタ膜を挟んで各斜面が貼り合わされている。
(もっと読む)
測定装置、位置測定システム、測定方法、較正方法及びプログラム

【課題】光を用いて物体までの距離を測定した測定結果において、所定の対象物に関する測定結果を特定することを可能とすること。
【解決手段】物体までの距離を光の照射によって測定点毎に測定する測定装置であって、測定点毎の距離を表す距離情報と、測定点毎の受光量を表す受光量情報と、を取得する光学式距離測定部と、受光量情報において、光量が閾値を超える測定点を、光源方向に対して多くの入射光を反射する反射面を有する対象物に対応する測定点であると判定する対象判定部と、対象判定部によって判定された測定点の距離に基づいて、自装置の基準点を原点とするローカル座標系における対象物の位置を算出し、当該ローカル座標系における位置と、同一の対象物のグローバル座標系における位置とに基づいて、較正を行う較正ステップと、を備える。
(もっと読む)
距離センサ
【課題】位相方式の距離センサにおける適切な距離レンジへの切り替えを実現すること。また、適切な距離レンジの検出を可能とすること。更に、送信波と反射波との位相差の正確な検出を可能とすること。
【解決手段】距離センサ100は、送信信号VTを「参照信号」とし、受信信号VRを「計測信号」とする2位相ロックインアンプ20を有して構成され、この2位相ロックインアンプ20によって、送信信号VTと受信信号VRとの位相差φが算出される。そして、距離計測を行う際には、先ず、分周器4の分周比Nを最大値Nmaxに設定し、このときに算出した測定距離Lxに応じて分周器4の分周比Nを最適な分周比Nに変更した後、再度、測定距離を算出する。
(もっと読む)
空間情報検出装置
【課題】撮像装置の受光光学系において波長選択性とフレアの抑制という2機能を満足させながらも従来よりも小型化することを可能にした空間情報検出装置を提供する。
【解決手段】発光源から特定波長の光を空間に投光する。撮像装置は、受光光学系22を通して前記空間を撮像する撮像素子21を備える。処理装置は、発光源10から投光した光と撮像装置20により受光した光の受光量との関係を用いて前記空間の情報を検出する。受光光学系22は、4枚のレンズ23〜26を備え、4枚のレンズ23〜26に形成された曲面から選択した2つの面に波長選択性を有する薄膜フィルタ27,28を備える。薄膜フィルタ27,28は選択する波長が異なっており、選択する波長の組み合わせにより特定波長を含む所定の通過帯域を持つ帯域通過フィルタが形成される。
(もっと読む)
距離センサ及び制御方法
【課題】位相方式の距離センサにおいて、測定対象物までの実際の距離に応じた適切な距離レンジの切り替えの実現。
【解決手段】距離センサ100は、発振器2が生成した基準クロック信号F1を1/N分周する分周器4の分周比Nと、PLL8が生成した参照クロック信号F2を1/N分周する分周器10の分周比Nとを可変として構成される。そして、距離計測を行う際には、先ず、分周器4,10それぞれの分周比Nを最大値Nmaxに設定し、このときに算出した測定距離Lxに応じて分周器4,10それぞれの分周比Nを最適な分周比Nに変更した後、再度、測定距離を算出する。
(もっと読む)
撮像面位置検出装置およびそれを具える作業ロボット
【課題】対象物の撮像面の位置を簡易かつ安価に、しかも短時間で検出する装置を提供することにある。
【解決手段】レーザ光軸が互いに交差するように配置された少なくとも3台のレーザ光照射手段と、前記少なくとも3台のレーザ光照射手段に対する所定位置で、それらのレーザ光照射手段からレーザビームを照射された対象物の表面を撮像する1台の単眼の撮像手段と、前記撮像手段が前記対象物の撮像面を撮像した1枚の画像での前記レーザビームの少なくとも3つの照射点の位置と前記撮像手段の撮像光軸との位置関係から幾何学的演算により前記撮像手段に対する前記対象物の撮像面の距離と向きとを求めて出力する演算手段と、を具えてなる、撮像面位置検出装置である。
(もっと読む)
距離測定装置
【目的】簡単な操作で測定対象物間の間隔や測定対象物の高さを測定できる距離測定装置を提供する。
【構成】レーザ光を出射する発光部20と、発光部20からの出射光をターゲット5に照射する対物レンズ14と、ターゲット5からの反射光を受光レンズ15を介して受光する受光部25と、受光部25で受光された反射光に基いてターゲット5までの距離を求める距離計算部41Aとを備えている距離測定装置1において、2つのターゲット5a,5bに対する視野角を設定する視野角設定部(回転リング31、回転位置検出ポテンショメータ32及び角度計算部33)を設けるとともに、この視野角設定部で設定された視野角と距離計算部41Aで求められた距離測定結果とに基いて2つのターゲット5a,5b間の距離を演算する間隔計算部41Bを設けた。
(もっと読む)
光センサー
【課題】光学部品の点数を少なく、構造を簡単化して、光センサーの小型化及び低コスト化を実現する。
【解決手段】振動検出用光センサー1は、光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5、及び1個の受光素子6を備える。波長板ユニットは1/4波長板7と振動板8とが一体化され、光センサーの小型化、構造及び組立の簡単化、低コストが図れる。受光素子6は、光軸x2を振動板の反射光の光軸x1と平行にかつ僅かにずらして配置される。それに対応して、受光素子に入射するビームスポット形状は、その中心cを受光面6aの中心Oから僅かにずらして離れた位置に置いて投影される。受光素子から検出される光量は、振動板の変位に対応して増減する。
(もっと読む)
光センサー
【課題】光学部品の点数を少なく、構造を簡単化して、光センサーの小型化及び低コスト化を実現する。
【解決手段】振動検出用光センサー1は、光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5、及び光検出部として二次元イメージセンサー6,14を備える。波長板ユニットは1/4波長板7と振動板8とが一体化され、光センサーの小型化、構造及び組立の簡単化、低コストが図れる。二次元イメージセンサーの受光面6a,14aには、振動板の反射面8aの位置に対応して、同心で異なる半径の円形のビームスポット形状が入射する。二次元イメージセンサーの出力信号からビームスポット形状の面積又は半径を測定することによって、振動板の位置又は変位量を検出する。
(もっと読む)
物体認識装置、及びプログラム
【課題】物体認識装置において、複数個の検出対象が走査方向に沿って近接している場合であっても、各検出対象の認識精度を向上させること
【解決手段】物体認識処理では、測距データ間の差が予め規定された許容値以下となる測距データによって形成される領域に含まれる測距データ群を、一つの候補領域をグループ化する(S130)。当該候補領域の大きさが規定値より大きければ(S150:YES)、当該候補領域を特別候補領域として、この特別候補領域に対応する画像データ上の対象領域に対して画像認識処理を実行し、対象領域中の検出対象の範囲を特定する(S170)。その特定した範囲に基づく検出対象の境界方位に従って、特別候補領域を分割し(S210)、その分割した新たな候補領域を含む全ての候補領域について追跡処理を実行して、候補領域の中で物体として確定すべきものと特定する(S230)。
(もっと読む)
上方障害物検知装置、衝突防止装置および上方障害物検知方法
【課題】道路の状態や車両の姿勢の変化にかかわらず、路面の上方に存在する物標から路面までの距離を求めることができる上方障害物検知装置、衝突防止装置および上方障害物検知方法を提供する。
【解決手段】頭上物標検知手段11,12,13によりレーザ光が出射されてから戻るまでの第1の時間と、当該レーザ光が頭上物標検知手段11から出射された際の出射角である仰角を検知し、頭上物標算出手段15は、第1の時間および仰角に基づいて頭上物標距離および頭上物標高さを算出する。その一方で、路面検知手段11,12,14によりレーザ光が路面で反射して路面検知手段に戻るまでの第2の時間と、当該レーザ光が出射された際の出射角である俯角を検知し、路面高さ算出手段15は、第2の時間および俯角に基づいて路面高さを算出する。道路高さ幅算出手段15は、頭上物標高さ、および、路面高さを足し合わせて道路高さ幅を算出する。
(もっと読む)
送受信信号相関検出装置及び距離測定装置
【課題】カットオフ周波数を適切に設定して、受信信号の2値化の際のコード認識率の低下を抑制して、高い相関値のピークを得る。
【解決手段】PNコード発生回路22で発生したPNコードに応じてレーザ光源26を駆動して光パルスを射出し、目標対象物で反射した反射光パルスをフォトダイオード32で受光して受信信号を出力する。バンドパスフィルタ34を通過した受信信号はマイナス方向へシフトされ、エンコーダ36で2値化され、信号処理部40で、相関値がピークとなるPNコードと受信信号との位相差に基づいて、目標対象物までの距離を算出する。バンドパスフィルタ34のローカットオフ周波数の下限を、受信信号が定常状態となるまでの時間が受信信号の1周期より小さくなる周波数とし、上限を、受信信号のピーク値からパルスひずみの相対量を減算した値が、エンコーダ36の閾値と雑音成分の信号レベルとの和より大きくなる周波数とする。
(もっと読む)
区画線検出装置および区画線検出方法
【課題】電磁波を送受信した結果に基づき区画線の検出を行う装置において、検出精度を向上させる。
【解決手段】近距離スキャンの1ライン分の測定データ(強度データ,距離データ,スキャン角度)を読み込み、読み込んだ強度データ列および距離データ列のそれぞれを微分することで、微分強度データ列および微分距離データ列を求める(S110〜S120)。微分強度データ列において正レベル,負レベルが連続し且つヌルレベルに挟まれた領域を候補範囲として抽出し(S130)、その抽出した候補範囲の中から、微分距離データ列の極性が、候補範囲に対応する部位で正,負,正(第1スキャン領域の場合)、又は負,正,負(第1スキャン領域の場合)と変化するものを、区画線からの反射が得られた対象領域として抽出する(S140)。
(もっと読む)
距離測定装置及びプロジェクタ
【課題】 正確な距離測定が可能であって測定可能な距離の範囲が広く、又機構の調整を容易に行える距離測定装置と、該距離測定装置を備えたプロジェクタを提供する。
【解決手段】 プロジェクタは、光源装置と、当該光源装置からの光を表示素子に導光する光源側光学系と、表示素子と、該表示素子から射出された画像をスクリーンに投影する投影側光学系と、距離測定装置1とを備え、光源装置や表示素子を制御するプロジェクタ制御手段を有しているものである。そして、この距離測定装置1は、レーザー光を測距対象に照射するレーザー発光器2と、測距対象からの反射光を集光する受光レンズ4と、この受光レンズ4を透過した測距対象からの反射光を受光する受光素子3と、を有し、レーザー発光器2からの射出レーザー光の光軸位置に受光レンズ4の受光領域を位置させているものである。
(もっと読む)
変位センサ
【課題】測定部位毎の態様が急変しても、安定して適切な測定を行うことができる変位センサを提供する。
【解決手段】フィードバック回数設定部19及び制御部16にて1出力周期において複数回の調整の設定がなされると、制御部16はその最後のフィードバック調整後の測定値信号の出力を行い、受光信号が安定するまでの過渡期における測定値の排除が行われる。
(もっと読む)
信号処理装置、及び走査式測距装置
【課題】走査式測距装置と被測定物との間に障害物が存在する場合であっても、被測定物に対する距離を正確に算出可能な走査式測距装置を提供する。
【解決手段】
走査部で周期的に偏向走査されたパルス状の測定光に対応して、受光部で検出された被測定物からの反射光に対応する反射信号を微分する微分処理部と、一次微分された一次微分反射信号の立上り時期を基準に当該一次微分反射信号の重心位置を算出し、当該重心位置に対応する時期を反射光の検出時期として求め、測定光の出力時期と当該反射光の検出時期との時間差に基づいて被測定物までの距離を算出して出力する演算部と、微分処理部により反射信号が一次微分された一次微分反射信号の立上り及び立下り特性と、反射信号が二次微分された二次微分反射信号の立上り特性に基づいて、反射光が複数の被測定物からの反射光が重畳した反射光であるか否かを判定する波形判定部を備えている。
(もっと読む)
3次元形状測定装置
【課題】 規格内の大きさの受光センサを用いても、受光センサを大きくした場合と同じように、3次元形状の測定可能範囲が大きいか、又は分解能を高くする。
【解決手段】 レーザ光照射器から測定対象物(OB)の表面にレーザ光を照射し、測定対象物OBの表面の照射スポット位置にて発生する散乱光の一部である反射光を集光レンズ32で集光するとともに、集光された反射光をダイクロイックミラー30で互いに異なる少なくとも第1方向及び第2方向に分離する。分離された反射光を、複数の受光素子からなる受光センサ14,24でそれぞれ受光する。受光センサ14,24は、レーザ出射器からの距離が異なる測定対象物OBの表面からの反射光をそれぞれ受光するとともに、一部距離を重複させる。受光センサ14,24による受光信号を用いて、3角測量法の原理に基づいてレーザ光照射器から測定対象物OBの表面までの距離を計算する。
(もっと読む)
変位センサ
【課題】安定的なフィードバック制御が可能な変位センサを提供する。
【解決手段】制御部は、複数の画素の第2の方向Yに沿った複数の走査線T毎に受光信号を読み取り、該受光信号に基づいて得られる受光波形のピークに基づく光量レベル(ピーク値又は飽和画素の個数)を走査線T毎に検出し、複数設定された光量レベルの所定の範囲毎の走査線Tの個数をカウントし、その個数が最も多い光量レベルの範囲に基づいてフィードバック制御を行う。
(もっと読む)
光電センサ
【課題】より簡易な構成で、高速に対象物までの距離を測定する。
【解決手段】光を投光する投光部1と、投光部1により投光された光を受光する受光部2と、受光部2により受光された光量に基づいて、予め設定した定数を用いた累乗近似により、受光部2から投光部1までの距離を測定する演算部3とを備えた。
(もっと読む)
時間計測装置および距離計測装置
【課題】簡易な構成で高精度の時間計測を行うことができる時間計測装置を提供する。
【解決手段】時間計測装置10は、定電流源11,制御部12,演算部13,容量素子C1〜C3,抵抗器R,スイッチSW0〜SW3,SW11〜SW13を備える。制御部12は、発光タイミング信号および受光タイミング信号を入力し、tacoff信号,tac1信号,tac2信号,tac3信号,reset1信号,reset2信号,reset3信号を生成して各スイッチへ与え、スイッチの開閉動作を制御する。演算部13は、スイッチSW1と容量素子C1との接続点の電位Vout1、スイッチSW2と容量素子C2との接続点の電位Vout2、および、スイッチSW3と容量素子C3との接続点の電位Vout3を入力して、電位Vout1〜Vout3に基づいて演算を行う。
(もっと読む)
121 - 140 / 559
[ Back to top ]