
Fターム[2F129BB34]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 距離センサ (41)
Fターム[2F129BB34]に分類される特許
21 - 40 / 41
方位特定装置、位置特定装置、コンピュータプログラム及び方位特定方法
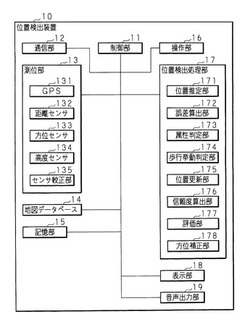
【課題】歩行者の移動方向の方位を精度良く特定することができる方位特定装置、位置特定装置、コンピュータプログラム及び方位特定方法を提供する。
【解決手段】位置更新部175は、地図マッチング法を利用して、属性判定部173で判定した誤差範囲内の属性(例えば、道路領域)と位置推定部171で算出した推定位置とに基づいて、誤差範囲内で歩行していると考えられる位置に推定位置を更新し、更新した位置を歩行者の位置として検出(特定)する。方位補正部178は、所定時間又は所定距離をカウントするための期間カウンタを備え、位置更新部175で歩行者の位置を道路上に特定した場合、測位方位をその特定位置の道路方位に補正することにより、歩行者の移動方向の方位を特定する。
(もっと読む)
区分的線形補間を用いる距離計算方法

【課題】線形補間により第1の点と第2の点との距離を計算する。
【解決手段】第1の点及び第2の点は第1緯度と第2緯度の間にある。第1の点と第2の点との間にある点についての補間された卯酉線曲率半径値が、第1緯度につ
いての第1卯酉線曲率半径値及び第2緯度についての第2卯酉線曲率半径値に基づいて、計算される。第1の点と第2の点との間にある点についての補間された子午線曲率半径値が、第1緯度についての第1子午線曲率半径値及び第2緯度についての第2子午線曲率半径値に基づいて、計算される。第1の点と第2の点との間にある点についての補間された余弦値が、第1緯度の余弦を表わす値及び第2緯度の余弦を表わす値に基づいて、計算さ
れる。次に、第1の点と第2の点との距離が、補間された卯酉線曲率半径値、補間された子午線曲率半径値、及び補間された余弦値に基づいて計算される。
(もっと読む)
ナビゲーション装置、傾斜角を用いた角速度補正装置および方法
【課題】車両の傾きが存在する環境でも、簡単なアルゴリズムで感度補正とゼロ点補正を行うことができ、自律航法精度を向上させることができる「ナビゲーション装置、傾斜角を用いた角速度補正装置および方法」を提供する。
【解決手段】加速度傾斜角θaccおよびGPS傾斜角θgpsからセンサ傾斜角θsensorと車両傾斜角θcarとを算出し、この2つの傾斜角θsensor,θcarに基づいて角速度ωgyroを補正することにより、車両が傾いているときでも、角速度センサ4の感度補正と同時に加速度センサ1のゼロ点補正を行うことができるようにする。また、このように同じ演算の中で角速度センサ4の感度補正と加速度センサ1のゼロ点補正とを行うことにより、簡単なアルゴリズムで感度補正とゼロ点補正を行うことができるようにする。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、および、自動車
【課題】非接触慣性航法装置を用いた際に、経路状態に応じて精度の高いナビゲーションを実現できるようにすることを課題とする。
【解決手段】3次元座標DB22は、道路形状に応じて自動車の移動に加速を伴うと予測される座標位置に対してあらかじめ属性を付与した3次元座標データを記憶する。ロケーションコンピュータ21は、現在位置、移動距離、および、進行方向に関する情報を算出する処理において、ナビゲーションセンサ6においてあらかじめ設定された閾値以上の加速度を検出した場合、属性を参照して、加速度の変化をキャンセルして移動距離を補正して、3次元マップマッチングを実行する。
(もっと読む)
車載通信装置
【課題】信号の受信以前から表示していた主画像の表示を妨げることなく、ユーザに対し信号の受信があったことを明確に通知することのできる車載通信装置の提供。
【解決手段】車両のナビゲーション装置は表示装置を備えている。表示装置の表示画面211には、地図画像である主画像PGを表示可能な主表示部212と、主表示部212に主画像PGが表示されている場合に、通信装置が車両外部からの信号を受信した時にユーザに通知するためのアイコンSG1〜SG3を表示する縮退部213が並んで形成されている。アイコンSG1〜SG3は主画像PGよりも表示面積が小さく形成されている。縮退部213は複数のアイコンSG1〜SG3が同時に表示可能なように形成されており、複数のアイコンSG1〜SG3は通信装置による受信した順序に並べられて、縮退部213に表示されている。
(もっと読む)
移動体装置および目標物情報検索方法
【課題】視認できる目標物の位置や情報を容易に確認することができる移動体装置を提供する。
【解決手段】移動体装置は、目標物について検索する際、現在位置を検出するとともに、距離測定器141で現在位置から目視可能な目標物21までの距離を測定する。さらに、方位センサ121で目標物の方位を検出する。そこで、測定された距離および検出された方位に基づいて地図データベースを参照し、目標物およびその位置を特定する。この特定された目標物の情報を好ましくは地図上に現在位置とともに表示する。比較的大きな仰角をもって目標物を指定した場合には、測定距離aを実際の距離xに換算して用いる。
(もっと読む)
車輪速パルス補正システム
【課題】
従来の車輪速パルス補正システムに比べて迅速に車輪速パルスの誤差を補正することができる車輪速パルス補正システムを提供することを目的とする。
【解決手段】
インフラ装置10から得られた特定区間の開始地点と終了地点の情報を元に、画像認識で道路に存在する特徴物を捕らえて認識する。通信により得られた情報および画像認識による情報から特定区間の距離を計算し、情報から計算された特定区間距離と車輪速パルスから計算した特定区間距離とを比較することで、車輪速パルスの誤差の補正を行う。
(もっと読む)
車輪速パルス補正装置
【課題】多大なインフラの構築を必要とせず、車速パルスの補正の機会が制限されることが少ない車輪速パルス補正装置の提供。
【解決手段】車輪速パルス補正装置10において、地物の位置情報を格納した地図データベース12と、走行経路上に存在する地物を画像認識する画像認識部20と、第1の地物Aが前記地物画像認識手段により画像認識されたときを起点して、第2の地物Bが前記地物画像認識手段により画像認識されるまでの車輪速センサの出力パルスをカウントする車速パルスカウント部24と、前記地物情報記憶手段に格納された第1の地物A及び第2の地物Bの地物情報に基づいて、第1の地物Aと第2の地物B間の距離Dを特定する相対距離算出部18と、前記2地物間パルスカウント手段によりカウントされたカウント値Cpと、前記2地物間距離特定手段により特定される2地物間距離Dとの関係に基づいて、前記演算式を補正することを特徴とする。
(もっと読む)
デッドレコニング装置
【課題】歩行者に装着されたセンサシステムによって人の歩行動作を計測、解析し、その移動方位と歩幅を装着型計算機システムが推定することにより、その歩行者に対して道案内などのアプリケーションを提供するために利用するデッドレコニング装置を提供する。
【解決手段】歩行動作に基づいて基準位置からの相対移動ベクトルを出力するデッドレコニング装置において、歩行動作を計測、解析して一歩ごとに歩行動作の移動方位と歩幅を推定して出力する手段と、前記出力された移動方位と前記出力された歩幅の信頼性を算定して出力する手段と、前記出力された移動方位と前記出力された歩幅に基づいて基準位置からの相対移動ベクトルを推定して出力する手段と、前記出力された移動方位と前記出力された歩幅、前記出力された移動方位の信頼性、前記出力された歩幅の信頼性に基づいて、前記出力された相対移動ベクトルの信頼性を算定して出力する手段を備える。
(もっと読む)
位置検出装置、その方法、そのプログラム及びその記録媒体
【課題】
移動体の位置を精度良く求める。
【解決手段】
マップマッチング位置算出部221は、地図情報121における道路上を車両が走行することを想定しつつ、GPS受信ユニット170による測位結果及び走行センサユニットによる検出結果に基づいて、マップマッチング位置を算出する。また、センサ位置算出部222は、走行センサユニットによる検出結果に基づいて、センサ位置を算出する。このセンサ位置は、当該測位結果又はマップマッチング位置の精度が高いと判断される場合には、センサ位置初期化部223により初期化される。こうして適宜初期化が施されるセンサ位置の精度がセンサ位置精度評価部224により高いと評価され、かつ、センサ位置とマップマッチング位置とがある程度以上離れている場合に、マップマッチング位置補正部225が、センサ位置を基準としてマップマッチング位置を補正する。
(もっと読む)
ナビゲーション装置、方法及びプログラム
【課題】単純で確実な技術により効果的に車速パルス係数を補正すること。
【解決手段】車両が接近する交通用の信号機を信号機検出手段50で検出し、このように検出した二つの信号機間の距離を、信号機間距離算出手段52が、道路地図データ記憶手段32に記憶されている前記道路地図データに基いて算出し、信号機間距離記憶手段53に記憶させる。また、前記信号機間で発生した車速パルス数をパルス数カウント手段54がカウントしパルス数記憶手段58に記憶させる。そして、係数補正手段56が、信号機間距離記憶手段53に記憶されている前記信号機間の距離を、パルス数パルス数記憶手段に記憶されている前記車速パルス数で除算して、車速パルス係数記憶手段16に記憶されている車速パルス係数を補正する。
(もっと読む)
ルート探索装置、その方法、そのプログラム及びその記録媒体
【課題】
合理的なタイミングで再ルート探索を行う。
【解決手段】
ルート探索部220による探索された推奨ルートが設定されているときに、推奨ルート上に存在しない新たなマップマッチング位置が得られると、再ルート探索条件設定部231が、センサデータ処理部210から報告された移動状況情報を検出するセンサの検出結果精度に基づいて、マップマッチング位置の精度が低いと評価できるか否かを判定する。この判定の結果が否定的であった場合には、再ルート探索条件設定部231は、通常の再ルート探索条件である第1再ルート探索条件を設定する。一方、当該判定の結果が肯定的であった場合には、再ルート探索条件設定部231は、第1再ルート探索条件よりも条件満足までに時間がかかる第2再ルート探索条件を設定する。設定された再ルート探索条件が満足されると、再ルート探索が行われる。
(もっと読む)
自車位置判定装置
【課題】自車位置の判定を高精度に行うことが可能な自車位置判定装置を提供する。
【解決手段】自車位置計算部14は、自車が駐車場の建物内に存在するか否かを判定するとともに、自車が建物内に存在すると判定された後に、自車が建物の屋上に存在するか否かを判定する屋内・屋上判定部28と、自車が駐車場を脱出したか否かを判定する駐車場判定部30と、自車が建物の屋上に存在すると判定された場合に、駐車場判定部30により自車が駐車場を脱出したと判定されないように判定制御を行う判定制御部32とを有する。
(もっと読む)
カーナビゲーション装置
【課題】カーナビゲーション装置において、経由地或いは目的地へ行く意味を失ったような場合、その経由地或いは目的地を案内経由から消去する。
【解決手段】案内経路に沿って走行中に、例えば用を済ませるために途中で立ち寄った施設があると、その立ち寄り施設が経由地または目的地として設定された施設と同じカテゴリーに属する施設であるか否かを判断し、同じカテゴリーであった場合、その経由地または目的地を案内経路の経由地または目的地から削除する。
(もっと読む)
周辺施設検索装置
【課題】ユーザが施設の行き易さを容易に把握することができる周辺施設検索装置を得ることを目的とする。
【解決手段】進行方向検出部5により検出された進行方向を含む一定の角度範囲内に存在する施設の中で、現在位置検出部4により検出された現在位置から最も近い位置に存在する施設を起点にして、一定幅の施設検索エリアPを渦巻状に設定し、施設検索処理部10により検索された施設を施設検索エリアP内に配置する施設配置処理部11を設け、その施設配置処理部11により施設検索エリアP内に配置された施設のうち、渦巻きの内側に存在する施設ほど、推奨順位が高い施設として提示する。
(もっと読む)
測位装置または測位方法
【課題】スリップに起因する車輪速センサ部計測値の位置更新誤差を補正し、移動体の位置更新を高精度に行うことができる測位装置および方法を提供する
【解決手段】GPS受信装置2からの測位結果により移動体の位置更新が可能な場合に、車輪速センサ1と前記受信装置2から得られる情報により、スリップ比Srと前記センサの情報から求めた加速度Awの関係を求めておく。前記受信装置2からの測位結果により移動体の位置更新が不可能な場合に、求めた加速度Aw’に応じたスリップ比Srを上記関係から算出する。このスリップ比Srを用いて車輪速センサ部計測値の補正を行い、この補正値を用いて位置更新を行うことで、移動体の位置更新精度を向上させることができる。
(もっと読む)
自車位置算出装置およびその算出方法
【課題】 走行中にナビゲーション装置がリセットされた場合であっても、自車位置の算出を精度良く行うことができる「自車位置算出装置およびその算出方法」を提供する。
【解決手段】 車両の走行距離に応じて生成されるパスル信号に基づき自車位置を算出する自車位置算出方法は、パルス信号を積算し、積算されたパルス数に応じた走行距離情報を一定の周期で送信するステップ(S103)と、送信された走行距離情報の差分に基づき移動距離を算出するステップ(ステップS104)と、自車の運動特性から移動距離が異常であるか否かを判定するステップ(ステップS105)と、異常であると判定されたとき、算出された移動距離を補正するステップ(S106)と、補正された移動距離に基づき自車位置の算出・更新を行うステップ(S108)とを有する。
(もっと読む)
加速度を利用した処理装置
【課題】車両の前後方向の加速度から高精度の距離を求める。
【解決手段】車両の前後方向の加速度に含まれる誤差をHPFで補正する加速度補正処理を行い、補正後の加速度を積分して速度を得る速度算出処理を行う。また加速度の過去n秒間の分散を求め、停止中フラグがセット状態で分散が停止中閾値以上であれば停止中フラグをクリアし、クリア状態で分散が走行中閾値以下であれば停止中フラグをセットする停止判定処理を行い、この停止中フラグがセット状態であれば速度をゼロに補正し、クリア状態であれば速度が閾値1≦速度≦閾値2となるように補正して、補正前後の速度差から速度誤差量を求める速度補正処理を行う。そして補正後の速度を積分して距離を求める距離算出処理を行い、この距離から速度誤差量に基づいて求めた距離誤差量を引いて補正後の距離を求める距離補正処理を行う。
(もっと読む)
車載用ナビゲーション装置
【課題】車両位置マークの表示の有無にかかわらず誘導経路上での車両の進行方向を容易に判断できるようにすることができる「車載用ナビゲーション装置」を提供する。
【解決手段】車載用ナビゲーション装置は、画面上で案内情報を提供する表示手段と、地図データ及び各種施設に関する情報を格納したメモリ手段と、前記表示手段及びメモリ手段に動作可能に接続された制御手段とを有する。
前記制御手段は、前記表示手段の画面上で目的地までの誘導経路33の案内を行っている状態で、当該誘導経路33に有料道路が含まれているときに、前記メモリ手段から当該誘導経路に含まれる有料道路に付帯する施設の情報(35、36、40〜42)を取得し、当該取得した施設の情報を、前記誘導経路上で車両の進行方向の左側に位置するように前記表示手段の画面上に表示させる。
(もっと読む)
航法装置、航法システム、航法測位方法、および車両
【課題】 搬送波差分型全地球測位システム(GPS)受信機とレーザスキャナを有する自律陸上用車両(AGV)のための水平航法システムを提供する。高精度の車両航法システムは先進AGVに強く求められている。高性能のRTK−GPS受信機によっても高い測位精度は得られるが、高い建物やその他の障害物により遮蔽された環境下では、その性能は著しく低下する。
【解決手段】 本発明の航法システムによれば、こうした苛酷な環境下であっても、正確なGPS測位に必要なデシメートルレベルの測位精度が得られる。水平航法システムは低価格の光ファイバージャイロ(FOG)と精密なオドメータから成る。航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定する。EKFの測定値としては二周波数GPS受信機からの二重差分型符号と搬送波位相及びレーザスキャナ測定から生じる相対位置がある。
(もっと読む)
21 - 40 / 41
[ Back to top ]