
Fターム[2F129BB40]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | ジャイロ (200)
Fターム[2F129BB40]に分類される特許
121 - 140 / 200
自車位置決定装置
【課題】自律航法では誤差が大きく、GPSデータが信頼できるときには、素早くGPSデータを利用して正確な自車位置を得ることができる「自車位置決定装置」とする。
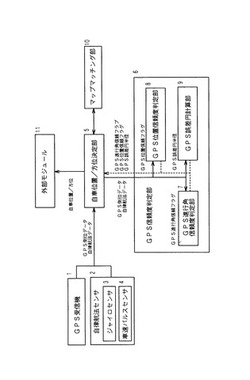
【解決手段】GPS受信信号により自車両の位置と進行角を検出するGPS位置進行角検出部と、ジャイロと車速データにより自車両の位置と進行方位を検出する自律航法位置方位検出部と、GPS位置進行角検出部と自律航法位置方位検出部により自車両の位置と進行方位を決定する自車位置方位決定部と、自車位置方位決定部で決定した自車両の位置を地図の道路に一致させるマップマッチング部と、GPS位置進行角検出部で検出したデータの信頼性を判定するGPS信頼度判定部とを備え、自車位置方位決定部では、マップマッチング処理が行われないとき、GPS信頼度判定部でGPSデータに信頼性があると判定したときには、GPS位置と進行角により自車両の位置と進行方位を決定する。
(もっと読む)
位置検出装置及び位置検出用プログラム

【課題】車両の位置検出システムとしての冗長性(対故障性)を向上させつつ、より正確な位置検出が可能な位置検出装置及び当該位置検出用のプログラムを提供する。
【解決手段】一つの車両の位置を示す位置情報を、相互に異なる位置検出条件の下で夫々生成する二つのGPSセンサ11及び12と、各GPSセンサ11及び12により生成された各位置情報夫々における位置検出精度につき、当該位置検出精度が高い方の位置情報を用いて車両の位置を算出する位置検出部2と、を備える。
(もっと読む)
車載用ナビゲーション装置
【課題】旋回走行を要する自走式の駐車場における旋回走行によって、自車方位および自車位置の誤差が発生したとしても、これらの誤差を迅速かつ適切に補正することができ、自車方位精度および自車位置精度を向上させることができる「車載用ナビゲーション装置」を提供すること。
【解決手段】自車位置・方位補正手段29,38により、駐車場における自車両の旋回走行の中心点を回転中心とした回転処理手段37による回転後の所定範囲の走行軌跡を用いて、自車方位の補正および自車位置の補正を行うこと。
(もっと読む)
ナビゲーション・システム内での反復拡張カルマン・フィルタを実施する方法及び装置
【課題】慣性測定装置、位置決め装置及び処理装置(70)を備える車両用のナビゲーション・システム(10)を提供する。
【解決手段】慣性測定装置は、車両の運転に関する第1のセットのデータを提供するように構成され、位置決め装置は、車両の運転に関する第2のセットのデータを提供するように構成れる。処理装置は、慣性測定装置及び位置決め装置が提供するデータのセットを受信するように構成され、処理装置は誤差処理装置を備える。誤差処理装置は、処理装置が受信したデータのセットに関係する時間更新誤差状態及び測定更新誤差状態を用いてプログラムされるものであり、第1の基準に基づいて時間更新誤差状態及び測定更新誤差状態の双方を繰り返し、第2の基準に基づいて測定更新誤差状態のみを繰り返すように構成される。
(もっと読む)
慣性航法装置およびその誤差補正方法
【課題】AHRSとINSで構成を共通化し、温度計を使わずジャイロの温度ドリフト誤差を補正し、基準となる姿勢・方位データを使わずジャイロセンサ誤差と加速度計誤差を補正する慣性航法装置。
【解決手段】推定センサ誤差データからジャイロと加速度計の出力を補正するセンサ誤差補正計算部と、補正後の移動体の位置や姿勢を計算し、推定姿勢/方位誤差データより移動体の位置や姿勢を補正する航法・姿勢方位計算部と、補正後の位置や姿勢の情報と移動体上のGPSセンサの絶対位置と絶対速度と比較して、ジャイロにおける温度ドリフトの影響を分離する温度誤差推定部と、分離後の温度ドリフト等の影響よりジャイロと加速度計の出力の誤差を推定しセンサ誤差補正計算部で使用するセンサ誤差データを校正し、補正後の位置や姿勢の出力の誤差を推定し航法・姿勢方位計算部で使用する姿勢/位置誤差データを校正するセンサ固有誤差推定部とを有する。
(もっと読む)
慣性航法装置およびその誤差補正方法
【課題】磁気方位センサの誤差や荒天時の風などの外乱に左右されることなく、より安定して姿勢/方位の初期データの精度を向上させることができる慣性航法装置を実現する。
【解決手段】移動体搭乗者のヘルメットに取付けられたジャイロセンサと加速度計の出力を利用して当該搭乗者頭部の位置や姿勢を求める慣性航法装置において、ジャイロセンサおよび加速度計の出力を補正するセンサ誤差補正計算部と、センサ誤差補正計算部により補正されたジャイロセンサおよび加速度計の出力を利用して頭部の位置や姿勢を計算するとともに、頭部の位置や姿勢の計算結果を補正する航法・姿勢方位計算部と、頭部が静止状態にあるときに航法・姿勢方位計算部より出力される速度データを速度誤差として利用し、センサ誤差補正計算部で使用するセンサ誤差データを校正するとともに、姿勢/位置誤差データを校正する誤差推定計算部とを有することを特徴とする。
(もっと読む)
ナビゲーション装置の経路探索方法
【課題】 刻々と変わる交通状況の性質を考慮した、精度の高いナビゲーション装置の処理を行う。
【解決手段】
ナビゲーション装置の記憶装置に、統計交通情報(過去に収集された交通情報より定まる旅行時間を含む統計データ)を記憶する。自身が保有する地図データのバージョン情報を交通情報配信センタに送信する。現在の交通情報より定まる旅行時間(移動速度)を含み、かつ地図データのバージョンに適合する現況交通情報を交通情報配信センタから入手する。旅行時間が不明なリンクの旅行時間を算出するために、未提供リンク補間情報も入手する。現況交通情報、未提供リンク補間情報、統計交通情報を用いて、経路探索を行う。経路探索は、イグニションON時に、自動的に行う。
(もっと読む)
慣性航法システム
【課題】 簡単な構造で、姿勢がほぼ安定して長時間・長距離航行する移動体に用いる場合のジャイロ及び加速時計のドリフト・バイアス誤差を低減する慣性航法システムを提供する。
【解決手段】 慣性航法システム座標系の直交する三軸周りの角速度を検出する少なくとも3個のジャイロスコープ1と、慣性航法システム座標系の直交する三軸方向の加速度を検出する少なくとも3個の加速度計2とを有する慣性測定部Sを備えた慣性航法システムIにおいて、慣性測定部Sを上面に配置し、上面と直交する慣性航法システム座標系の一軸周りに回転をする回転台3と、回転台3の回転角を検出する回転角検出手段4とを有する回転台部Rと、慣性測定部Sと回転台部Rからの出力により姿勢情報及び位置情報を計算する演算部Cとを備えたことを特徴とする。
(もっと読む)
方位センサの補正係数演算装置及び演算プログラム
【課題】GPS情報を基準とし、方位センサからの方位センサ情報に基づく方位変化量及びGPS情報に基づく方位変化量に関する情報の取得を適切に行い、前記方位センサ情報を補正するための補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】近傍領域arA内と後方領域arB内の双方で直進し、近傍領域arAと後方領域arBとの間で方位変更があった場合に、近傍領域arA内での進行方位と後方領域arB内での進行方位との間のGPS情報に基づくGPS方位変化量ang−GPSと、方位センサ情報に基づくセンサ方位変化量ang−SENとの差異に基づいて、方位センサ情報を補正するための補正係数を演算する。
(もっと読む)
方位センサの補正係数演算装置及び演算プログラム
【課題】方位変更の前後におけるGPS情報と方位センサ情報とに基づいて、方位センサ情報を補正するための補正係数を演算する場合において、方位センサの静的な設置角度及びその設置角度の動的な変化を考慮した動的補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】方位変更の前後におけるGPS方位変化量とセンサ方位変化量との差異に基づいて、方位センサ情報の基本補正係数を演算し、方位センサ4の検出軸Xの静的な設置角度αに応じて基本補正係数を補正した静的補正係数を演算し、方位センサ4の検出軸X方向の動的変化角度βに応じて、静的補正係数を動的に補正して動的補正係数を演算する。
(もっと読む)
周辺施設検索装置
【課題】ユーザが施設の行き易さを容易に把握することができる周辺施設検索装置を得ることを目的とする。
【解決手段】進行方向検出部5により検出された進行方向を含む一定の角度範囲内に存在する施設の中で、現在位置検出部4により検出された現在位置から最も近い位置に存在する施設を起点にして、一定幅の施設検索エリアPを渦巻状に設定し、施設検索処理部10により検索された施設を施設検索エリアP内に配置する施設配置処理部11を設け、その施設配置処理部11により施設検索エリアP内に配置された施設のうち、渦巻きの内側に存在する施設ほど、推奨順位が高い施設として提示する。
(もっと読む)
ナビゲーション装置
【課題】0点電圧の検出精度を向上させて車両の現在位置を正確に推定させることを可能とし、しかも特別な機構の追加を要さず、簡易に実現可能なナビゲーション装置を提供する。
【解決手段】車両の後退時にバックギアチェンジを検出する車両後退検出手段と、車速パルスから車両の走行状態を検出する走行検出手段と、車両の方位を検出する方位検出手段と、車両の現在時位置を推定する自車位置推定手段とを備え、前記車両後退検出手段でバックギアが入っていないことを検出し、かつ、前記走行検出手段で一定時間車速パルスが発生しないことを検知した場合に、前記方位検出手段の出力を基準値として記憶するように構成されている。
(もっと読む)
リアルタイムバイアス推定器に基づく慣性機器のための自己較正
1つの例示的な慣性測定装置が、自己較正バイアス補正信号を組み込む。第1の慣性機器及び第2の慣性機器が、測定される慣性属性を表す、それぞれの入力信号を生成する。バイアス推定器が、第1のバイアス補正信号及び第2のバイアス補正信号を生成する。第1の加算ノード及び第2の加算ノードが、それぞれの入力信号と、それぞれの第1のバイアス補正信号及び第2のバイアス補正信号とを受信する。第1の加算ノード及び第2の加算ノードは、それぞれの加算された信号を、第1の慣性機器及び第2の慣性機器に提供する。第1の慣性機器及び第2の慣性機器は、それぞれの加算された信号に基づいて、慣性属性の値を表す、それぞれの出力信号を生成する。バイアス推定器が、それぞれの第1の時間間隔中及び第2の時間間隔中に行われる第1の測定及び第2の測定に基づいて、第1のバイアス補正信号及び第2のバイアス補正信号を計算し、第1のバイアス誤差信号及び第2のバイアス誤差信号のうちの一方の符号が、第1の時間間隔中の一方の状態から、第2の時間間隔中の他方の状態に変化する。 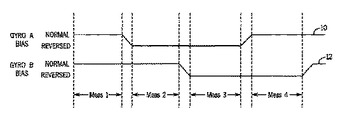 (もっと読む)
(もっと読む)
ジャイロを搭載するロボット、ジャイロ較正装置、プログラム及び方法
ジャイロを搭載するロボットにおいて較正を行うとき、目標壁面に対してロボットよりレーザービームを照射し、目標壁面上に占めるレーザーポイントの位置を測定する。その測定された位置を初期値として取得し(S10,S12)、較正が開始することを表示する(S14,S16)。そして較正期間をリセット(S18)して較正期間の計時処理を開始する。所定の較正期間の間はジャイロの検出値をサンプリングにより継続して取得する(S20)。取得中に外乱があると警報を出力し、較正をやり直す。較正期間中に外乱がなく満了すれば、較正期間内の検出値に基づき較正値が設定される(S26,S28)。  (もっと読む)
(もっと読む)
車載用ナビゲーション装置
【課題】 絶対傾斜角を検出することによって、傾斜を有する地点においても自車位置を高精度に検出することができ、ひいては、自車を目的地まで迅速かつ適切に案内することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】 自車の進行方向に対する自車の絶対的な傾斜角度である絶対傾斜角を計算する絶対傾斜角計算手段32と、この絶対傾斜角計算手段32によって算出された前記絶対傾斜角に応じたジャイロセンサ6の感度の補正を行う補正手段33とを備えたこと。
(もっと読む)
車載ナビゲーション装置及び自車位置推定方法
【課題】屋内駐車場などのGPS信号の受信が困難な施設内で、施設側の設備に依存することなく、自車位置を精度良く推定することができるようにする。
【解決手段】周回走行判定部27が走行軌跡算出部25によって算出された自車の走行軌跡に基づいて、自車が周回走行を行っているか否かを判定する。周回走行判定部27により自車が周回走行を行っていると判定された場合、自車位置推定部24は、走行軌跡記憶部26に記憶されている周回走行の走行軌跡と、走行距離検出部22により検出された自車の走行距離とに基づいて、自車位置を推定する。
(もっと読む)
車両用ナビゲーション装置およびコストパラメータチューニング方法
【課題】ユーザが現状のナビゲーションルートに不満がある場合に、ユーザ走行ルートを記憶することで、コストパラメータをより満足度の高い方向に変更する。
【解決手段】チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出し(ステップS104)、チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出し(ステップS107)、一致率の上昇値として算出する(ステップS108)ことを繰り返し(ステップS109)、コストパラメータ変動値を算出し(ステップS110)、コストパラメータチューニング後のコストパラメータを算出し(ステップS111)、平均一致率を算出する(ステップS116)ことを繰り返し(ステップS117)、コストパラメータ変更回数が規定回数より大きくなるか、または平均一致率が上昇でなくなれば、その時点でのコストパラメータを最終的なコストパラメータとして決定する(ステップS118)。
(もっと読む)
ナビゲーション装置
【課題】旋回動作の多い駐車場内でも、精度よく車両方位を求めるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、駐車場内の誘導路や駐車スペースが、一般的に、隣接する道路方位αに対して同じ向きか、又はα+90°、α+180°若しくはα+270°であることを利用して車両方位を修正する。具体的には、ナビゲーション装置は、方位の変位を積算して車両方位を求める車両方位算出手段と、現在位置が駐車場内に在るか否かを判定する手段と、現在位置が駐車場内に在ると判定された場合、当該駐車場に入る前に現在位置が存在した道路の方位α、α+90°、α+180°及びα+270°のうち車両方位算出手段で算出した車両方位に最も近い方位に当該車両方位を修正する手段とを備えている。
(もっと読む)
車両用ナビゲーション装置
【課題】 設定頻度の高い目的地に関して、容易な入力作業によって設定することができる車両用ナビゲーション装置を提供する。
【解決手段】 利用者から発せられる音声を入力し認識する音声入力部1および音声認識部2からなる音声認識手段と、前記音声認識手段によって認識された音声に基づいて前記目的地を設定する目的地設定部3と、目的地設定部3に設定された前記目的地の名称を履歴情報としてメモリ4に格納する集計演算部5と、前記利用者が前記目的地を設定する際に前記履歴情報に基づいて設定回数が多い順に前記名称を前記選択肢として表示器10に表示させるシステム制御部9と、を備えてなる。
(もっと読む)
経路探索装置
【課題】地域毎に適したコストテーブルを用いつつ、そのコストテーブルを記憶するメモリを低く抑えることができ、かつ、経路コストの算出に時間がかからない経路探索装置を提供すること。
【解決手段】基本コストテーブルを用意し、各地域に対応する地域コストテーブルとして、基本コストテーブルと異なっている部分のみを設定する。経路探索をする際には、各地域に対応する地域コストテーブルと、その地域コストテーブルに含まれていない部分については、基本コストテーブルとを用いて、各地域内の経路コストを算出する。
(もっと読む)
121 - 140 / 200
[ Back to top ]