
Fターム[2F129BB40]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | ジャイロ (200)
Fターム[2F129BB40]に分類される特許
101 - 120 / 200
停止判断装置、ナビゲーション装置、停止判断方法、停止判断プログラムおよび記録媒体
【課題】移動体が停止したか否かを精度よく判断すること。
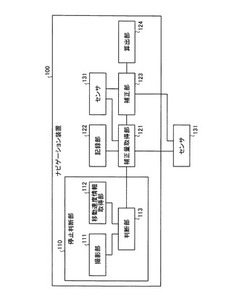
【解決手段】ナビゲーション装置100の停止判断部110は、自装置が搭載された移動体が停止しているか否かを判断する。撮影部111は、移動体の移動に応じて撮影画像に変化が生じる方向に向けられている。移動速度情報取得部112は、移動体の移動速度情報を取得する。判断部113は、撮影部111によって撮影された撮影画像の変化の有無に基づいて、移動体が停止しているか否かを判断する。補正量取得部121は、判断部113による判断結果に基づいて、移動体の移動状態を検出するセンサ131からの出力信号を補正するための補正量を取得する。補正部123は、補正量を用いてセンサ131からの出力信号を補正する。算出部124は、補正部123によって補正されたセンサ131からの出力信号を用いて移動体の現在位置を算出する。
(もっと読む)
ナビゲーション装置及びナビゲーション方法

【課題】自立航法を主とするハイブリッド航法による経路誘導中に、自車がフェリーなどに乗船して移動し、降船したとき、より簡便で、かつ迅速に正しい自車位置や自車方位に更新することができる「ナビゲーション装置及びナビゲーション方法」を提供すること。
【解決手段】制御手段12は、自立航法を主とするハイブリッド航法により経路誘導中に、第1の測位手段4により検出される位置及び方位を更新して記憶させる。そして、自車が移動物体に乗ったときに、衛星航法に切り換えて、記憶した方位の更新を停止するとともに、第2の測位手段3により検出される位置及び方位を取得し、自車が移動物体から降りたときに、自立航法を主とするハイブリッド航法に切り換えて、最後に取得した衛星航法に基づく位置及び方位を用いて記憶した位置及び方位を更新する。以降は、更新した位置及び方位を基礎として経路誘導を行う。
(もっと読む)
車載用角速度検出装置
【課題】GPSとの通信が不可能である状況下でも、ジャイロセンサの出力値と車両速度値との相関関係から、周囲温度の変化によって出力値が変化してしまういわゆる温度ドリフトを軽減すること。
【解決手段】車載用角速度検出装置1の角速度補正部14が、ヨーレート値γと車両速度値Vとの相関関係に基づいて温度ドリフト値γdを算出することから、GPSとの通信状態によらずに、温度ドリフト値γdを算出可能である。したがって、GPSとの通信が不可能である状況下でも、ジャイロセンサの出力値と車輪速度の関係から、上述の温度ドリフトを軽減することができる。
(もっと読む)
位置検出装置及び位置検出方法
【目的】位置検出精度を維持しつつ、CPUの負荷を軽減する「位置検出装置及び位置検出方法」を提供することである。
【構成】車両の現在位置を検出する位置検出装置において、自律航法部は第1の周期で高速に自律航法に基づいて位置計算し、補正部は、該第1の周期以上の長さの第2の周期で自律航法位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角などを補正する第1補正処理を行ない、かつ、GPSの測位周期である第3の周期でGPSデータを用いて自律航法による計算結果を補正する第2補正処理を行う。周期制御部は、補正対象の推定誤差を算出し、該推定誤差と目標誤差の差分に基づいて少なくとも第1、第2周期を制御する。
(もっと読む)
地図表示装置
【課題】カーナビゲーション装置における発生原因を究明すべき現象の発生原因の究明を容易にする。
【解決手段】前回の停止直前に保持している学習データである初期値や、各種のデータ、設定値、学習データ、特異現象発生の情報を車両のイグニッションスイッチ20がオンされてからオフされるまで記録し、1つのデータファイルに格納するように構成した。これにより、カーナビゲーション装置1で発生した現象を後に再現することが可能となるので、特異現象の発生原因の究明に役立つ。
(もっと読む)
自己位置標定装置、自己位置標定方法および自己位置標定プログラム
【課題】道路上の白線や、道路標識といった既存の道路インフラを利用して、自己位置標定装置の標定精度を向上させる。
【解決手段】車両に搭載した自己位置標定装置100において、DR演算部3はデッドレコニングにより車両位置を算出する。擬似距離残差計算部22は擬似距離と衛星軌道パラメータに基づく衛星−車両間の距離とで擬似距離残差を算出する。カメラ7は車両前方の道路を撮像し、画像処理部8は画像に映る白線の方位角を算出し、白線方位角取得部23は白線情報データベース9から白線の方位角を取得し、白線方位角残差計算部24は画像処理部8が算出した白線の方位角と白線方位角取得部23が取得した白線の方位角とで方位角残差を算出する。拡張カルマンフィルタ6は擬似距離残差と方位角残差とを観測量として入力し、DR演算部3の測位結果の誤差を推定する。DR演算部3は拡張カルマンフィルタ6の推定誤差で測位結果を補正する。
(もっと読む)
集積化モノリシック・ジャイロスコープ/加速度計
【目的】単一の半導体基板上にジャイロスコープ、加速度計及びMPUを集積する。
【構成】多軸ジャイロスコープ(24)、単軸ジャイロスコープ(26)及び3軸加速度計が単一半導体基板(20)上にMPU(30)と共に形成される。ジャイロスコープは3つの相互に直角な軸(Z、X、Y)回りの回転の感知手段を提供し、加速度計は3軸(Z、X、Y)に沿う加速度の感知手段を提供する。MPU(30)はジャイロスコープ及び加速度計を制御及び駆動して連続的な位置表示を提供する。
(もっと読む)
センサバイアスを打ち消す慣性測定システム及び方法
【課題】固定のバイアスオフセットが打ち消される新規で且つ改良されたシステム及び方法を提供する。
【解決手段】ジャイロスコープがその入力軸に垂直な軸の周りで周期的にディザを受け、ジャイロスコープからの信号を遅延して、ディザ周期の半分だけジャイロスコープ信号より遅れる遅延信号を発生し、そしてその遅延信号と、ジャイロスコープからの信号とを合成して、バイアスが打ち消された出力信号を発生する慣性測定システム及び方法。
(もっと読む)
ナビゲーション装置、傾斜角を用いた角速度補正装置および方法
【課題】車両の傾きが存在する環境でも、簡単なアルゴリズムで感度補正とゼロ点補正を行うことができ、自律航法精度を向上させることができる「ナビゲーション装置、傾斜角を用いた角速度補正装置および方法」を提供する。
【解決手段】加速度傾斜角θaccおよびGPS傾斜角θgpsからセンサ傾斜角θsensorと車両傾斜角θcarとを算出し、この2つの傾斜角θsensor,θcarに基づいて角速度ωgyroを補正することにより、車両が傾いているときでも、角速度センサ4の感度補正と同時に加速度センサ1のゼロ点補正を行うことができるようにする。また、このように同じ演算の中で角速度センサ4の感度補正と加速度センサ1のゼロ点補正とを行うことにより、簡単なアルゴリズムで感度補正とゼロ点補正を行うことができるようにする。
(もっと読む)
道路形状算出装置及び車両センサ補正装置
【課題】車両の走行環境や走行状態に関わらず最適に道路形状を算出することが可能な道路形状算出装置を提供する。
【解決手段】道路の形状(θ)を算出する道路形状算出装置であって、車両の前後方向に働く実際の前後加速度と前記車両の前後方向に働く加速度を検出する前後加速度検出手段の検出値との間の第1関係式と、前記車両の横方向に働く実際の横加速度と前記車両の横方向に働く加速度を検出する横加速度検出手段の検出値との間の第2関係式と、前記車両の前後方向に働く実際の前後加速度及び前記車両の横方向に働く実際の横加速度と前記車両の前後方向に働く加速度を検出する前後加速度検出手段の検出値及び車両の横方向に働く加速度を検出する横加速度検出手段の検出値との間の第3関係式とから導かれる前記道路の形状(θ)に相当する加速度を算出するアルゴリズムに基づいて、前記道路の形状(θ)を算出する(S104)。
(もっと読む)
センサ誤差推定装置及び観測装置及び方法及びプログラム
【課題】計測誤差を推定し、推定した計測誤差で計測量を補正する観測装置において、誤差推定の進捗度を正しく見積もる。
【解決手段】誤差推定部130は、距離及び距離変化率観測部112が観測した擬似距離などに基づいて、車速パルス発生器121・ジャイロスコープ122などが計測した速度・角速度などの計測誤差を推定し、推定した計測誤差の推定誤差を算出する。進捗度算出部151は、誤差推定部130が算出した推定誤差に基づいて、誤差推定の進捗度を算出する。
(もっと読む)
ジャイロセンサモジュールおよび角速度検出方法
【課題】検出軸の取付角度の変化にかかわらず、検出精度の向上したジャイロセンサモジュールおよび角速度検出方法を提供すること。
【解決手段】センサ出力補正回路32に含まれる第1、第2のオフセット調整回路36,37によって、第1角速度ω1および第2角速度ω2を、車両が停止している時の第1のジャイロセンサ10の補正値B1および第2のジャイロセンサ20の補正値B2を減じることによって、第1角速度ω1”および第2角速度ω2”に換算できる。したがって、車両の移動時のより正確な第1角速度ω1”および第2角速度ω2”を得ることができる。
(もっと読む)
道路特定装置
【課題】地図データが現実と乖離していたとしても、正しく車両の走行道路(高架道路に登ったのか、下道を走行しているのかなど)を判定することのできる道路特定装置を提供する。
【解決手段】地図が現実とずれていることを判断した場合、地図データ上で、そのずれ(地図ずれ)を考慮した範囲の地図道路勾配情報をHDD装置からすべて取得する。一方、車両では、走行中の(車両が存在している)道路の道路勾配を車速センサやジャイロを用いて逐次検出する。そして、取得した地図データの道路勾配情報の中で、実際の道路勾配に最も近いものを探し出し、車両の地図上での存在するべき位置(道路)を特定する。
(もっと読む)
車載用ナビゲーション装置
【課題】ドライバの運転状態に応じて片手運転に対する適切な警告を行う車載用ナビゲーション装置を提供する。
【解決手段】車両の操舵ハンドルの把持状態を検出する把持状態検出手段と、該把持状態検出手段により操舵ハンドルが片手で把持されていることが検出され、かつ、予め定められた不正片手運転識別条件が充足される場合にのみ、不正片手運転が発生したと認識する不正片手運転認識手段と、該不正片手運転が認識された場合に、予め定められた不正片手運転対応処理を行う不正片手運転対応処理実行手段と、を備えることを特徴とする車載用ナビゲーション装置として提供可能である。
(もっと読む)
車両位置検出システム
【課題】本発明は、車両位置をより高精度で検出できる車両位置検出システムを提供することを課題とする。
【解決手段】自車の位置を検出することができる車両位置検出システム10において、自車に搭載され、GPS衛星からのGPS信号を受信するGPS受信部12と、自車に搭載され、交差点手前に配置される光ビーコンからの光ビーコン情報を受信する光ビーコン通信手段14と、自車に搭載され、光ビーコン通信手段14で光ビーコン情報を受信したら、この光ビーコンの情報に基づいて自車の位置を補正する中央処理装置19とを備えている。
(もっと読む)
ナビゲーション装置、その制御方法及び制御プログラム
【課題】ナビゲーションの技術において、ジャイロセンサの総合的な取り付け角度にかかわらず、自車の旋回量を高精度に検出してジャイロセンサを効果的に補正する。
【解決手段】旋回量算出手段12が、異なる各時点におけるカメラ5からの各画像をもとに、同じ特徴点とその変位量を検出することにより、その時点間における車両の旋回量を算出し(旋回量算出処理)、このように算出した旋回量と、その旋回量に対応したタイミングでジャイロセンサ7から得られた出力値と、に基いて、ジャイロ補正手段14が、ナビゲーション手段10におけるジャイロの調整値を補正する(ジャイロ補正処理)。
(もっと読む)
車載用ナビゲーション装置、方法及びプログラム
【課題】車載用ナビゲーション装置に関する技術において、車両走行中にいつでも振動ジャイロセンサの0点電圧を高精度に検出可能とする。
【解決手段】0点電圧推定部7は、振動ジャイロからの方位出力値と、GPSによる自車位置情報との相関をもとに、新たな0点電圧を求める。この際、自車位置情報は、GPSで受信した情報により算出した角速度であり、また、新たな0点電圧の値は、その角速度と前記方位出力値とが最大相関となる同一の時間区間内における角速度と方位出力値と、をもとに算出する。具体的には、その0点電圧は、角速度と方位出力値の、それぞれの平均値と標準偏差値から算出する。
(もっと読む)
車両の走行安全装置
【課題】分岐点での進路予測精度を向上させる。
【解決手段】道路データに基づいて自車両の進路に存在する分岐点を検出する分岐点検出部14と、分岐点の前後における道路データに基づいて分岐点までの道路と、分岐点からの道路とが、同一のカーブにより構成されているか否かを判定する同一カーブ判定部16とを備え、進路予測部17は、分岐路からの道路である複数の分岐路のうち、同一カーブ判定部16によって分岐点までの道路と同一のカーブにより構成されていると判定された分岐路を、自車両の進路として設定する。
(もっと読む)
慣性センサ、及び慣性センサの製造方法
【課題】センサとして安定した特性が得られ、しかも検出軸を所定角度に設定できる慣性
センサを提供することを目的とする。
【解決手段】検出軸方向の物理量の大きさを検出する検出素子である水晶振動素子11、
水晶振動素子11を収納するセラミックパッケージ17、セラミックパッケージ17の外
部底面に形成された実装電極18、及び実装電極18に接続され検出軸を検出すべき正規
方向から所定角度傾斜させる金属球2を備えたセンサ本体10と、金属球2を含む実装電
極18と接続されるリードフレーム4と、センサ本体10をモールドする樹脂5とを備え
るようにした。
(もっと読む)
移動軌跡算出方法、移動軌跡算出装置及び地図データ生成方法
【課題】比較的低価格のジャイロ及び速度(加速度)センサを使用しても、実際の移動軌跡との誤差が小さい軌跡を算出できる新しい算出方法を実現。
【解決手段】移動物体の第1地点Pから第2地点Qへの間の移動軌跡を移動後に算出する移動軌跡算出装置であって、第1地点Pから第2地点Qへの移動中の移動方向及び移動速度を検出して移動データとして記憶する記憶装置21と、記憶した移動データを順方向に使用して、第1地点から第2地点への順方向移動軌跡を算出する順方向軌跡算出部31と、記憶した移動データを逆方向に使用して、第2地点から第1地点への逆方向移動軌跡を算出する逆方向軌跡算出部32と、順方向移動軌跡と逆方向移動軌跡を、第1地点と第2地点に対する位置に応じて変化する重み付け比で合成する合成処理部33と、を備える。
(もっと読む)
101 - 120 / 200
[ Back to top ]