
Fターム[2F129BB40]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | ジャイロ (200)
Fターム[2F129BB40]に分類される特許
21 - 40 / 200
停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム
【課題】路面に形成された停止線を適切に検出することを可能にした停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、停止線の候補となる地物(停止線候補)を検出した場合に、車両の走行する道路の路面色が変更した変更地点よりも進行方向側に停止線候補の路面標示を検出し、且つ該変更地点から車両の進行方向の所定距離以内に停止線候補の路面標示を検出した場合に、該停止線候補を停止線と特定するように構成する。
(もっと読む)
表示装置及び消費電力削減方法

【課題】装置がバッテリ動作時には装置の近接センサを未給電状態のオフにするとともに、表示画面上に操作アイコン等のソフトキーを常時表示させることができる表示装置を提供する。
【解決手段】ソフトキーを表示する表示部18と、表示装置に対する操作が行われようとする状態を検出するセンサ部20と、センサ部20により操作が行われようとする状態が検出された場合、前記ソフトキーを表示部18に表示させ、センサ部20により、操作が行なわれようとする状態が検出されない場合、前記ソフトキーを表示部18に表示させない制御部11と、を備え、制御部11は、装置がバッテリ駆動である場合、センサ部20を非動作とするとともに、前記ソフトキーを表示部18に表示させる。
(もっと読む)
運転支援システム、方法およびプログラム
【課題】交差点が連続する道路において後の交差点に関する案内を適切に実行する技術の提供。
【解決手段】第1交差点と2交差点との間の距離を交差点間距離として取得し、前記第2交差点に関する案内を実行するために前記第2交差点以前にて確保すべき距離を必要距離として取得し、前記第1交差点に到達する前に前記車両に搭載された検出手段によって複数の地物の中の少なくとも1個が検出された場合に前記複数の地物の中のいずれかの地物を基準地物とし、当該基準地物からの走行距離によって前記車両の現在位置を特定し、前記検出手段によって検出された地物の個数に応じた前記基準地物からの走行距離の誤差を誤差距離として取得し、前記交差点間距離が前記必要距離と前記誤差距離との和以上であり、かつ、前記誤差距離に基づいて前記車両が前記第1交差点を通過したと判断される場合に、前記第2交差点に関する案内を実行する。
(もっと読む)
停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム
【課題】路面に形成された停止線を適切に検出することを可能にした停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、停止線の候補となる地物(停止線候補)を検出した場合に、進行方向別通行区分の路面標示よりも進行方向側に停止線候補の路面標示を検出し、且つ最も分岐点側にある進行方向別通行区分の路面標示から車両の進行方向の所定距離以内に停止線候補の路面標示を検出した場合に、該停止線候補を停止線と特定するように構成する。
(もっと読む)
参照データ取得装置、参照データ取得システム、参照データ取得方法、及び参照データ取得プログラム
【課題】誤認識となりうる参照データを用いてマッチングを行うことを防止しつつ、車両が進入する可能性のある地点については参照データを用いて漏れなくマッチングを行うことを可能とする、参照データ取得装置を提供すること。
【解決手段】参照データ取得装置50は、参照データと撮影画像とのマッチングが行われる可能性のあるマッチング地点の内、車両2の現在位置から所定範囲内に存在するマッチング地点を特定するマッチング地点特定部51aと、マッチング地点特定部51aにより特定されたマッチング地点への当該車両2の進入方向を特定する進入方向特定部51bと、車両2の現在位置から所定範囲内に存在するマッチング地点の内、当該マッチング地点への当該車両2の進入方向と当該車両2の進行方向との角度差が所定値以上のマッチング地点に対応する参照データを取得する参照データ取得部51cとを備える。
(もっと読む)
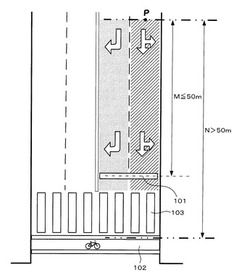
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】右左折後の移動体の位置を迅速且つ正確に検出及び修正することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が分岐点で右左折したことを検出した場合に、車両の分岐点での走行態様(右折したか左折したか)と進入道路の対向車線の有無や車線数に基づいて、車両が分岐点で右左折した際に、実際の車両の位置に対して車両の進行方向に生じ得る最大の検出誤差である前ズレ量Mと、実際の車両の位置に対して車両の進行方向と逆方向に生じ得る最大の検出誤差である後ズレ量Nとをそれぞれ算出し(S17、S18)、算出された前ズレ量Mから後ズレ量Nの間のいずれかの地点に車両が位置するとして、検出された車両の現在位置を修正する(S19)ように構成する。
(もっと読む)
信号機情報更新システム、信号機情報更新装置、信号機情報更新方法及びコンピュータプログラム
【課題】ユーザに案内分岐点を正確に特定させることを可能にした信号機情報更新システム、信号機情報更新装置、信号機情報更新方法及びコンピュータプログラムを提供する。
【解決手段】手前分岐点の車両が走行する走行車線の退出側信号機の位置情報が取得できない場合には、手前分岐点の周辺にある地物(例えば、他の信号機、停止線等)を用いて退出側信号機の位置を推定し、推定された退出側信号機の位置に基づいて案内開始地点を設定し、設定された案内開始地点に車両が到達した場合に、案内分岐点の案内を行う。また、推定結果に基づいて地図情報DB31に記憶された地図情報を更新する(S28)ように構成する。
(もっと読む)
車両誘導システム及び車両誘導方法
【課題】待機車両に対して効率的な誘導を行い、構内での車両待機時間を短縮する。
【解決手段】構内の所定位置に設置された複数の撮像装置と、前記構内の車両に対する所定エリアへの誘導を管理する構内車両誘導装置と、前記車両の誘導先を表示する表示装置とを含む車両誘導システムにおいて、前記構内車両誘導装置は、前記撮像装置により撮影された画像に含まれる前記車両の車両情報を取得する車両情報取得手段と、前記車両情報取得手段により得られる車両情報と、予め設定される前記構内における荷物の入出庫を仕分けする仕分け情報と、前記荷物を所定の地区へ配送する車両を管理する配車情報とに基づいて、前記車両を所定エリアへ誘導する誘導制御手段と、前記誘導制御手段により得られる前記車両に対する誘導先を前記表示装置に所定のタイミングで表示する表示制御手段とを有することにより、上記課題を解決する。
(もっと読む)
ナビゲーション装置、ナビゲーション装置を用いた音声認識方法、および、プログラム
【課題】入力した音声のうちの一部分が誤認識された場合に、音声の再入力にかかるユーザの手間を軽減する技術を提供する。
【解決手段】ナビゲーション装置100は、複数の選択ボタンを備え、複数の構成要素に分割可能な言語系列を格納する記憶部と、音声を入力する音声入力部と、記憶部に格納されている言語系列の中から、音声入力部から入力された音声に対応する言語系列の候補を特定する音声認識部と、音声認識部によって特定された言語系列の候補を、選択ボタン数の構成要素に分割して表示する表示部と、を備える。音声認識部は、表示された言語系列に含まれる1つの構成要素が選択ボタンを用いて選択されると、選択された構成要素について変更した言語系列の候補を再度特定する。
(もっと読む)
目的地推定装置及びそれを含むナビゲーションシステム、目的地推定方法、及び目的地推定プログラム
【課題】 過去に目的地とされた場所を目的地候補として、それらの目的地候補の中から目的地を推定する目的地推定装置において、目的地の推定精度を向上させる。
【解決部】 目的地推定装置100は、過去に目的地とされた場所の履歴を記憶する学習データ記憶部9bと、学習データ記憶部9bに記憶された場所を含む複数の目的地候補の中から、目的地を推定する目的地推定部83と、目的地推定部83にて目的地として推定される目的地候補から、学習データ記憶部9bに記憶された履歴に基づいて、目的地である確信度が所定の閾値より低いと判断される目的地候補を排除する候補排除部84とを備えている。
(もっと読む)
角速度検出方法及びその装置
【課題】角速度計測装置が如何なる姿勢であっても角速度の計測が可能で、かつ連続データで検出可能な角速度検出装置を提供すること。
【解決手段】第1補正部102は、3軸磁気信号α1及び3軸加速度信号β1が入力されて第1補正磁気信号α2及び第1補正加速度信号β2を出力する。第2補正部103は、第1補正磁気信号α2及び第1補正加速度信号β2が入力されて第2補正磁気信号α3及び第2補正加速度信号β3を出力する。回転軸情報演算部104は、第2補正磁気信号α3及び第2補正加速度信号β3が入力されて回転軸情報cを出力する。回転量情報演算部105は、回転軸情報cと第1補正磁気信号α2とが入力されて回転量情報dを出力する。角速度ベクトル情報演算部106は、回転軸情報cと回転量情報dとが入力されて角速度ベクトル情報eを出力する。
(もっと読む)
モバイルロケータ
【課題】本発明は、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正するとともに、GPS測位において、車両位置の計測結果の誤差を小さくすることを目的とする。
【解決手段】本発明は、自律航法及び補正データを利用して算出した2地点間の移動距離を、その2地点の絶対位置に基づくその2地点間の移動距離と比較し、これらの移動距離の相違に応じて、補正データを修正する。そして、GPS測位を利用して算出したある地点の位置を、その地点の絶対位置に基づいて補正する。
(もっと読む)
ナビゲーションデバイスの位置を決定すること
【課題】ナビゲーションデバイスの位置を決定するための方法を提供すること。
【解決手段】ナビゲーションデバイスは、複数の異なる位置決定手順に基づいてナビゲーションデバイスの位置を決定するように適合される。各位置決定手順は、所定のパラメータセットと共に作用する。複数の地理的エリアが提供され、各地理的エリアは、位置決定手順のうちの1つに関連付けられる。ナビゲーションデバイスの近似的位置が決定され、この近似的位置に基づいて、ナビゲーションデバイスが位置している地理的エリアが決定される。決定された地理的エリアに基づいて、複数の位置決定手順のうちの1つが選択され、選択された位置決定手順に基づいて、ナビゲーションデバイスの位置が決定される。
(もっと読む)
ナビゲーション装置およびその案内方法
【課題】 本発明の目的は、進行してはならない方向を直感的に把握できるナビゲーション装置の技術を提供することにある。
【解決手段】
本発明に係るナビゲーション装置は、分岐ごとに、分岐先のそれぞれの道路の規制情報に基づいて、進行が規制される分岐方向を特定する規制特定手段と、前記規制特定手段により特定した規制のある分岐方向に応じ、進行方向の規制を表示する標識を特定する標識特定手段と、前記標識特定手段により特定した標識を地図に重畳して出力する標識出力手段と、を備えることを特徴とする。
(もっと読む)
地図表示装置
【課題】ユーザは、周辺にある駅に関する情報を常に把握することができる。
【解決手段】 地図表示装置は、地図情報を記憶する記憶手段と、表示領域に前記地図情報を表示する表示手段と、前記表示領域の範囲外にある駅を特定する駅特定手段と、を備える。また、前記表示手段は、特定された駅に関する情報を前記地図情報と共に前記表示領域に表示する。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラム
【課題】案内地点および目的地点などのユーザが確認したいと考えるエリアの詳細地図を当該エリアに対する特定のズーム操作等を必要とせず、スクロール操作等による表示範囲の変更のみで確認することができるナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、表示部において表示させる地図情報に基づく地図上の地点である表示地点に関する表示地点情報、および、当該地図の表示縮尺を取得し、表示地点情報および表示縮尺に基づく地図の表示範囲に存在する所定領域を検出し、所定領域に設定された縮尺閾値を取得し、表示縮尺が縮尺閾値より小さいか否か判定し、表示縮尺が縮尺閾値より小さいと判定された場合、縮尺閾値の所定領域の地図に関する地図情報を取得し、地図情報を表示部に表示させる。
(もっと読む)
地図画像表示システム、地図画像表示装置、地図画像表示方法及びコンピュータプログラム
【課題】ユーザに違和感を与えない地図画像を表示することを可能にした地図画像表示システム、地図画像表示装置、地図画像表示方法及びコンピュータプログラムを提供する。
【解決手段】車両の現在位置等の基準位置に基づいて地図画像の表示対象領域を特定し、表示対象領域を近傍エリア56と遠方エリア58に分割し、分割したエリア毎に道路網の情報量の異なるレイヤの地図データを読み出し、読み出した地図データに基づいて生成された複数の地図画像を組み合わせて液晶ディスプレイ15に地図画像を表示するように構成する。
(もっと読む)
地図表示装置および地図更新システム
【課題】ユーザに操作の繰り返しを要求することなく、更新情報を取得することができる。
【解決手段】 記憶手段内の地図情報よりも新しい更新地図情報の提供を要求するための更新要求信号を生成する生成手段と、前記地図情報の更新の要求を受け付けると、前記地図情報の更新が可能であるか否かを判定する判定手段と、前記地図情報の更新が不可であると判定した場合、前記更新の要求を受け付けた前記地図上の特定エリアを示すエリア情報を前記記憶手段に登録する登録手段と、を備え、前記生成手段は、前記記憶手段に前記エリア情報が登録されている場合、前記更新要求信号を生成する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】 移動体に備えられた衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した位置算出手法の提案。
【解決手段】 GPSユニット3とINSユニット5とを備えた位置算出装置1において、位置算出精度判定部6は、位置算出精度を判定する。影響度合設定部7は、位置算出精度判定部6により判定された位置算出精度に基づいて、GPS計測結果のINS計測結果に対する影響度合を設定する。カップリング処理部9は、影響度合設定部7により設定された影響度合に基づいてGPS計測結果とINS計測結果とのカップリング処理を実行して、移動体の位置を算出する。
(もっと読む)
キャリブレーション方法、情報処理装置及びキャリブレーションプログラム
【課題】ジャイロの零点オフセットを簡易にキャリブレーションすることを課題とする。
【解決手段】サーバ装置30は、移動体端末10が第1の地点から位置または角度の誤差が特定量となる第2の地点へ移動した場合に、モーションセンサ11の出力を用いたデッドレコニングにより第2の地点で得られる位置または角度と特定量との差分を特定する。さらに、サーバ装置30は、特定結果として得られた差分から、当該移動体が静止状態である場合にジャイロ11bによって出力されるセンサ値である零点オフセットを算出する。
(もっと読む)
21 - 40 / 200
[ Back to top ]