
Fターム[2F129EE57]の内容
航行(Navigation) (246,646) | 出力/表示 (50,983) | 出力/表示の対象 (25,611) | 交通情報 (2,453)
Fターム[2F129EE57]の下位に属するFターム
Fターム[2F129EE57]に分類される特許
301 - 320 / 817
車載用ナビゲーション装置
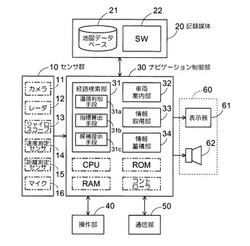
【課題】他車両や道路等を起因として運転者が走行中に受けるストレスを従来よりも低減して、快適な運転ができる車載用ナビゲーション装置を提供する。
【解決手段】本装置は、経路探索部31と、車両案内部32とを備える。更に、自車両が走行しているときに、所定の検知対象を検知するセンサ11,12,…と、センサ11,12,…によって検出したデータに基づいて、所定の検知対象に関する対象情報を取得する情報取得部33と、情報取得部33によって取得した対象情報と、自車両が走行している道路を特定する道路情報とを関連付けて蓄積する情報蓄積部34とを有し、経路探索部31は、情報蓄積部34によって蓄積された対象情報及び道路情報に基づいて運転者が受ける圧迫感に関する指標を求め、当該圧迫感に関する指標が低い経路を優先的に提示する。
(もっと読む)
情報処理端末、情報処理装置、情報処理システム、情報処理方法、および、プログラム

【課題】より適切に充電スタンドの案内を行う。
【解決手段】ステップS56において、地図情報に基づいて、車両の走行可能範囲内にある充電スタンドが検索される。ステップS57において、各充電スタンドに備えられている充電装置の使用の有無、および、使用中の充電装置の充電終了予定時刻を含む充電スタンド情報を受信したと判定された場合、ステップS58において、検索された各充電スタンドへの到着予想時刻が演算される。ステップS59において、検索された各充電スタンドについて、充電装置の使用の有無および使用中の充電装置の充電終了予定時刻、並びに、充電スタンドへの到着予想時刻に基づいて、充電完了予想時刻が演算される。ステップS61において、充電完了予想時刻に基づいて、充電スタンドの位置を区別して表示される。本発明は、例えば、カーナビゲーション装置に適用できる。
(もっと読む)
ナビゲーション装置、プローブ情報送信方法、プログラム及び交通情報作成装置
【課題】交差点における方向別の渋滞状態を正確に判定することができる区間におけるプローブ情報を作成して、情報配信センタへ送信することが可能となるナビゲーション装置、プローブ情報作成方法及びプログラムを提供する。
【解決手段】ナビゲーション装置2のCPU41は、自車両が収集対象交差点DB39に記憶された方向別プローブ情報を収集する交差点を通過した場合には、当該交差点を通過するまでの方向別交通情報取得区間内で収集した単位距離区間情報と、交差点通過後走行した退出リンクのリンクIDから方向別プローブ情報(「進入リンク」、「退出リンク」、「区間旅行時間」等である。)を作成して、情報配信センタ3へ送信する。
(もっと読む)
通信型カーナビゲーションシステム
【課題】
従来の経路探索・誘導機能を主体としたカーナビゲーションシステムの機能及び用途の拡大・向上を図る。
【解決手段】
管轄区域内全道路の各種走行環境情報(地図情報、道路標識・標示情報、渋滞情報、道路規制情報、気象情報等)を有するセンター装置において、車載装置から一定時間毎あるいは車両の一定距離走行毎に送信される車両状態情報(車両走行状態情報・車両情報・ドライバー情報)と前記センター装置の有する前記車両状態情報に対応した走行環境情報の安全走行に関する整合性(交通規則に違反にしていないか否か等)あるいは省エネルギー走行の可否、可の場合にはその走行条件等を比較・演算・判定し、その結果を安全走行支援情報あるいは省エネルギー走行支援情報として当該車両の車載装置に送信することによって走行支援を行う。
(もっと読む)
経路案内装置、経路案内方法及びコンピュータプログラム
【課題】エンジンを駆動することなくモータ駆動走行のみによって車両が出発地から目的地まで走行可能な経路を案内する経路案内装置、経路案内方法及びコンピュータプログラムを提供する。
【解決手段】車両2の出発地から目的地までの走行予定経路を設定する際に、モータ駆動走行(EV走行)のみによって車両2が出発地から目的地まで走行可能な経路を探索する(S3)。具体的には、リンク走行時の車両2の駆動力が常に所定の閾値以下となると推定されるリンクのみから構成されるとともに、車両2がEV走行のみで目的地まで走行する間にバッテリ7のSOC値が所定値以下とならない経路であり、該当する経路が探索できた場合には、その経路を走行予定経路に設定する経路の候補として案内する(S9)ように構成する。
(もっと読む)
車載システム
【課題】GPSアンテナの設置位置や光ビーコンアンテナの設置位置によらずに、光ビーコン信号より算定した現在位置を用いて、GPSによる衛星測位によって算定した現在位置を正しく補正する「車載システム」を提供する。
【解決手段】光ビーコンアンテナ17の自車上の設置位置と、GPSアンテナ14の自車上の設置位置202の指定を、予めユーザから受け付ける。路側機400から光ビーコンで自車位置情報を受信したならば、光ビーコンアンテナ17の設置位置の位置座標を算出し、光ビーコンアンテナ17の設置位置の位置座標と、ユーザから設置された光ビーコンアンテナ17とGPSアンテナ14の自車の設置位置の相対位置関係より、GPSアンテナ14の設置位置の位置座標を求め、GPS受信機15の衛星測位位置を、求めたGPSアンテナ14の位置座標に一致させる補正情報を設定する。
(もっと読む)
走行案内装置、走行案内方法及びコンピュータプログラム
【課題】表示装置に表示された地図の表示エリア内に含まれない走行可能範囲の境界の位置をユーザに容易に把握させることを可能とした走行案内装置、走行案内方法及びコンピュータプログラムを提供する。
【解決手段】車両2の現在のバッテリ7のSOC値を取得し、取得されたバッテリのSOC値の他、地図情報及び車両2の学習データに基づいて、車両2がEV走行によって走行可能な走行可能範囲の境界を算出する。そして、算出された走行可能範囲の境界の内、液晶ディスプレイ15に表示された地図の表示エリアに含まれない非表示境界がある場合に、非表示境界の位置を特定する境界特定情報(枠やカーソル等のマーク、文字、記号等)を液晶ディスプレイ15に表示するように構成する。
(もっと読む)
施設案内装置、施設案内方法及びコンピュータプログラム
【課題】ユーザの希望する条件に適合した施設を効率的に検索し、案内することを可能とした施設案内装置、施設案内方法及びコンピュータプログラムを提供する。
【解決手段】検索範囲内を対象として評価指標に関わらず選択された第1ジャンルと同一ジャンルの施設であることを検索条件として施設の検索処理を実行し(S4)、第1ジャンルの検索条件に適合すると判定された施設の評価指標の内、最も高い評価指標を基準値として設定する(S5)。また、第1ジャンルに基づいて第2ジャンルを選択し(S6)、検索範囲内を対象として選択された第2ジャンルと同一ジャンルの施設であり、且つ基準値より高い評価指標が対応付けられていることを検索条件として施設の検索処理を実行する(S7)。そして、それぞれ検索条件に適合すると判定された施設の情報を案内する(S10)ように構成する。
(もっと読む)
経路探索装置、経路探索方法、経路探索プログラムおよび記録媒体
【課題】右左折する交差点を見逃したり、間違えたりすることを回避すること。
【解決手段】取得部102によって取得された移動体の位置に関する位置関連情報に基づいて、算出部103によって、移動体の現在地点の位置情報を算出する。つぎに、精度判定部104によって、移動体の現在地点の位置情報の精度が悪いと判定された場合、範囲判定部105によって位置精度低下範囲を判定する。そして、探索部106によって、位置精度低下範囲を脱出してから所定距離を道なりに移動する経路を探索する。
(もっと読む)
車両用情報報知システム
【課題】ドライバーの快適性をより向上させることを可能にする。
【解決手段】情報の種別を示す情報種別識別子を含む運行方針関連情報を配信する路側機1と、路側機1から配信される運行方針関連情報を受信する車載無線器2と、を含み、車載無線器2で受信した運行方針関連情報に含まれる情報種別識別子に応じて報知の要否を判断し、報知を行うことが必要である旨の判断を行った場合に、当該運行方針関連情報に従った報知を行う。
(もっと読む)
ナビゲーション装置
【課題】樹木の落葉等によって車両が汚損しないような駐車場に案内できるナビゲーション装置を提供する。
【解決手段】設定された目的地及びその周辺に存在する駐車場を検索する駐車場検索部31と、駐車場に車両を案内する車両案内部32とを備える。更に、駐車場検索部31によって検索された各駐車場について、樹木の落葉等によって車両が汚損する可能性を判別する汚損判別部33と、駐車場検索部31によって検索された各駐車場について、駐車場の形態に基づいて、駐車場及びその周辺に樹木が存在するか否かを判別する要因判別部34と、汚損判別部33によって汚損する可能性が低い駐車場、及び、要因判別部34によって樹木が存在しない駐車場の一方または双方を報知し、報知した駐車場のいずれかを選択させる報知選択部35とを有し、車両案内部32は、報知選択部35によって選択された駐車場に車両を案内する。
(もっと読む)
ナビゲーション装置および迂回経路情報提示方法
【課題】誘導経路の非設定時に、ユーザが面倒な操作を行うことなく、出来るだけ短い距離で前方交差点の渋滞等を回避する迂回経路を提示することが可能な「ナビゲーション装置および迂回経路情報提示方法」を提供する。
【解決手段】誘導経路が設定されていない場合において、進行方向前方に存在する少なくとも2つ以上先の基準交差点から所定距離以内に自車位置が近づいたときに、基準交差点を通過した後の1つ目の交差点と2つ目の交差点との間に位置する地点を仮目的地として設定し、基準交差点を通らずに自車位置から仮目的地まで迂回する経路を探索して提示することにより、基準交差点から所定距離以内に自車位置が近づく度に迂回経路情報が自動的に提示されるとともに、当該基準交差点に近い交差点(基準交差点から1つ目の交差点または2つ目の交差点)に出る迂回経路が探索される可能性が高くなるようにする。
(もっと読む)
エコドライブ支援装置
【課題】燃費向上の観点に加えて、車両の周辺状況情報をも考慮した運転操作アシスト情報の提示を行うエコドライブ支援装置を提供する。
【解決手段】車両周辺情報取得部400で取得された車両の周辺状況情報と、周辺交通状況取得部700で取得された車両の周辺の交通状況と、走行情報取得部200で取得された車両の傾斜角と、に応じて使用領域記憶手段に記憶される最適使用領域又は許容使用領域のいずれかを選択する使用領域選択手段と、使用ポイント算出手段で算出された使用ポイントが、使用領域選択手段で選択された使用領域に含まれているかを判定する判定手段と、判定手段による判定に応じた表示を変更する表示部600と、を有する。
(もっと読む)
車載カメラ制御システム
【課題】防犯用のカメラとして車載カメラを有効利用しつつ記録される画像数を適正化することができる車載カメラ制御システムを提供する。
【解決手段】車両2の外部より受信したトリガ信号に基づき車両周辺の画像を撮像する車載カメラ10を備えた車載機14と、基地局4からのトリガ情報に基づき車両2へトリガ信号を送信する一方、車両2から受信した画像を基地局4へ送信する通信局3と、トリガ信号を送信するトリガ間隔を演算してそのトリガ情報を通信局3へ送信する一方、通信局3から画像を受信してこの画像を記録する画像記録装置31を備える基地局4とからなり、通信局3が設置された道路の交通量に応じてトリガ信号を送信するトリガ間隔を演算することを特徴とする。
(もっと読む)
ナビゲーション装置
【課題】ナビゲーション装置において、自車位置から誘導地点までの間にいくつの交差点があるかを運転者が一目で分かるようにする。
【解決手段】ナビゲーション装置は、自車位置22を検出すると共に、道路上に誘導地点23を設定する。そして、誘導地点23から所定範囲にある進入道路と交差道路26とを少なくとも含む各道路の形状を簡略化した要約地図20を作成し、これを誘導地点23における自車両の進行方向を示す誘導地図として表示する。その後、自車両が移動して交差道路26と進入道路の交差点27を通過したときに、要約地図20において交差道路26の表示形態を変化させる。
(もっと読む)
ナビゲーション装置
【課題】時刻や日付等の時間的要因の指定を容易に変更できるようにするとともに、このような時間的要因の変更がある毎にその時間的要因の下での交通情報に基づいた推奨誘導経路を決定して表示することにより、時間的要因が異なる各時点での推奨誘導経路の相違を容易に比較できるナビゲーション装置を提供する。
【解決手段】交通情報を記憶する記憶手段と、目的地Gまでの誘導経路Rの決定要因となる時間的要因の指定を受け付ける指定受付手段と、指定受付手段により受け付けた指定時間的要因T1,T2の下で交通情報に基づいて誘導経路Rを決定する誘導経路決定手段と、指定時間的要因と、指定可能な時間的要因の範囲又は指定可能な時間的要因の複数の時点とを表す時間的要因表示Ft、Fdを生成する時間的要因表示生成手段と、誘導経路Rとともに、時間的要因表示Ft、Fdを表示する表示手段と、を備える。
(もっと読む)
ナビゲーション装置およびナビゲーション装置の地図表示方法
【課題】 ユーザが容易に進入可能な領域に関する情報のみを表示可能な技術を提供する。
【解決手段】
本発明のナビゲーション装置は、目的地までの経路中に、進行方向の車線と、反対方向の車線と、を隔てる中央分離帯が存在する場合、中央分離帯区間における反対方向の車線側の所定の領域について、前記地図画像上の表示形態を変更すること
を特徴とするナビゲーション装置。
(もっと読む)
走行支援装置、走行支援方法及びコンピュータプログラム
【課題】走行予定経路の周辺環境に配慮した走行を行わせること可能とした走行支援装置、走行支援方法及びコンピュータプログラムを提供する。
【解決手段】車両2の走行予定経路の経路情報と車両情報を取得し、取得した走行予定経路の経路情報及び車両情報に基づいて、走行予定経路を走行する場合に必要な車両2の駆動力を区間毎に推定し、推定された区間毎の車両2の駆動力が閾値以上となる区間があるか否か判定し、推定された区間毎の車両2の駆動力が閾値以上となる区間が無いと判定された場合に、走行予定経路において走行予定経路の周辺環境から駆動モータ5を駆動源とする走行を推奨するモータ走行推奨区間を特定し、特定されたモータ走行推奨区間に基づいて制御スケジュール49を生成するように構成する。
(もっと読む)
走行支援装置、走行支援方法及びコンピュータプログラム
【課題】追従走行中及び追従走行後の適切な制御スケジュールを生成することができるとともに、制御部の処理負担についても軽減することが可能な走行支援装置、走行支援方法及びコンピュータプログラムを提供する。
【解決手段】ACCシステムにより追従走行制御が実行されている場合に、追従対象となる前方車両の走行予定経路と走行情報を取得し(S25)、車両2の走行予定経路と前方車両の走行予定経路とを比較することにより追従走行区間を特定し(S27)、追従走行区間の前方車両の推定車速及び推定加速度から追従走行区間を走行する車両2の車速及び加速度を推定し(S28)、追従走行区間での追従走行制御を考慮した制御スケジュールを新たに生成する(S30)ように構成する。
(もっと読む)
走行案内装置、走行案内方法及びコンピュータプログラム
【課題】走行可能範囲のサイズに適合した地図の縮尺への変更操作を容易に行わせることを可能とし、ユーザの利便性を向上させた走行案内装置、走行案内方法及びコンピュータプログラムを提供する。
【解決手段】車両2の現在のバッテリ7のSOC値を取得し、取得されたバッテリのSOC値の他、地図情報及び車両2に関する各種情報に基づいて、車両2がEV走行によって走行可能な走行可能範囲を算出し、算出された走行可能範囲の全体を液晶ディスプレイ15の表示エリアに表示可能な地図の最大縮尺である全体表示最大縮尺を算出する。そして、変更可能な縮尺範囲と液晶ディスプレイ15に表示される地図の現在の縮尺をそれぞれ示す縮尺表示部73を液晶ディスプレイ15に表示し、縮尺表示部73に示される縮尺範囲の内、全体表示最大縮尺を他の縮尺より強調して表示する。
(もっと読む)
301 - 320 / 817
[ Back to top ]