
Fターム[2F129EE75]の内容
航行(Navigation) (246,646) | 出力/表示 (50,983) | 出力/表示の対象 (25,611) | 交差点 (1,665) | レーンガイド (366)
Fターム[2F129EE75]の下位に属するFターム
複数の交差点 (58)
Fターム[2F129EE75]に分類される特許
141 - 160 / 308
経路誘導装置、経路誘導方法、コンピュータプログラム
【課題】視覚から認識される路面標示の向きと、聴覚から認識される案内音声の向きとにより生じる情報の認識の不一致を解消し、交差点等における脱出道路の方向を分かりやすく案内する仕組みを提供する。
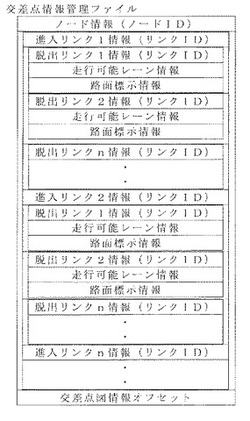
【解決手段】本装置10は、経路探索処理によって求めた誘導経路上に存在する所定のノード情報と、このノードへ進入する進入リンク情報と、この進入リンクごとに脱出する脱出リンク情報と、この脱出リンク情報に対応して設けられた実際の路面に表示された矢印を示す路面標示情報と、を互いに関連付けて記憶する交差点情報記憶部F2を備える。したがって、車両とノードとの距離を監視し、この距離が予め設定した所定の距離に近づいたとき、この交差点情報記憶部を参照することで、ノードへ進入する進入リンク情報と、このノードより脱出する脱出リンク情報とに対応して設けられた路面標示情報を特定することができる。
(もっと読む)
ナビゲーション装置、ナビゲーション方法およびナビゲーションプログラム

【課題】信号機の点灯タイミングを考慮して、案内対象地点を走行するための準備を運転者が余裕を持って実施することができる技術を提供する。
【解決手段】自車両の前方にある案内対象地点を示す情報を取得し、点灯タイミングが連動して制御される信号機群を示す信号機群情報を取得し、前記信号機群情報を参照し、前記信号機群の始端信号機が、前記案内対象地点から前記自車両側に所定距離内に存在するときは、存在しないときよりも早いタイミングで、前記案内対象地点の走行に関する案内を行う。
(もっと読む)
車両案内装置
【課題】ドライバが案内経路を迷って逸脱する程度を推定し、これに応じた経路案内を行う。
【解決手段】情報処理システムは、ドライバが実際に車両を運転して分岐点にさしかかる手前で、現在の走行データを緊張状態ドライバモデルと平常状態ドライバモデルに入力し、緊張状態ドライバモデルによる確率P1と、平常状態ドライバモデルによる確率P2を計算する。情報処理システム1は、P1とP2の合計に対するP1の割合に基づいて、現在ドライバがどのような状態であるかを検出・推定し、ドライバが案内経路から迷って逸脱する可能性が高いと判断した場合、その程度に応じて通常の経路案内から詳細な経路案内に案内方法を変更する。これにより、ドライバが緊張などによって案内経路から逸脱しそうな場合、より詳細な画面表示、音声ガイドを行うことで、ドライバが安心して走行できるようにする。
(もっと読む)
路面標示地図生成方法
【課題】 道路面の車線境界線を連結されたポリラインとして抽出する。
【解決手段】 道路を走行しながら路面をビデオカメラで撮影するとともに、各撮影地点の位置座標をGPS等で取得する。コンピュータは、この動画の各フレーム画像を変換して真上から見た状態の正射画像を生成し、撮影地点の位置座標に基づいて走行したパス上に配置することで、連結画像を生成し、画像処理によって車線境界線を抽出する。撮影時のパスNP22に垂直な方向の車線境界線の間隔d22が所定値以下の標示や、車線境界線に対してパスが偏った位置関係になる標示を誤認識として削除する。このように車線境界線とパスまたは他の車線境界線との距離に基づいて、誤認識を削除するとともに、車線の境界を画する標示を特定し、連結することで、ポリラインとして車線境界線を抽出することができる。
(もっと読む)
車両用地図表示装置。
【課題】走行地点における車線を区切る区画線を運転者に認識させることができるようにする。
【解決手段】車両の自車位置を特定し(S100)、自車位置周辺の地図データを取得し(S300)、自車位置および地図データに基づいて走行地点の路面に描画された車線を区切る区画線を特定し(S500)、当該走行地点の路面に描画された区画線を表した画像を地図データに基づく地図表示画像とともに表示部に表示させる(S600)。
(もっと読む)
管路ナビゲーションシステム
【課題】作業員が目的とする管路施設に迅速且つ確実に到着することができる管路ナビゲーションシステムを提供する。
【解決手段】ユーザは、管路図表示部26に表示された管路図上において、目的地指定手段27により目的地を、目的地方向指定手段28により車線方向を指定する。指定された目的地データと車線方向データは、経由地・目的地設定部29に送信される。経由地・目的地設定部29は、これらのデータをもとに経由地39の座標データを設定し、ルート検索部16に対して目的地及び経由地の座標データを送信する。ルート検索部16は、地図データ取得部13から道路ネットワークデータを、現在位置検出手段14から現在位置データを取得し、現在位置から経由地39を通過して目的地37に至る走行経路を検索し、目的地である管路施設が設置されている道路の車線まで確実にルート案内を行う。
(もっと読む)
ナビゲーション装置、及びナビゲーションプログラム
【課題】より静かで快適な走行の案内を行う。
【解決手段】自動車を運転する上で発生するロードノイズ(騒音、振動)は、タイヤと路面との摩擦音や摩擦音がタイヤ内部やタイヤのパターンと共鳴する事で発生し、舗装状態などの路面状況により大きく異なる。そこで、本実施形態のナビゲーション装置では、実際に走行した車線が静かに走行することが可能な静走車線か否かを判定して車線状況情報を作成する。そして、自車、又は情報センタで作成した車線状況情報に基づいて、車線案内により静走車線の案内を行う。すなわち、実際の走行に基づく走行状況情報の作成と、作成した走行状況情報に基づく静走車線の車線案内が行われる。
(もっと読む)
ナビゲーション装置及びナビゲーションプログラム
【課題】進路変更後の道路に対応して車線が増設されている場合に、より解りやすい案内を行う。
【解決手段】分岐点での進路変更が必要であり、進路変更後の道路に対応して車線が増設されている道路(分岐点手前の道路)を走行中であると判断した場合に、車線が増設されている道路区間(車線増設区間)よりも手前では「方向案内」を行い、車線増設区間では「車線案内」を行う。このように車線増設区間に到達したか否かにより「方向案内」と「車線案内」とを切り換え、いずれか一方の案内をすることで、運転者は混乱することなく案内を認識することができる。特に、分岐点が狭角分岐している場合や、増幅した車線が進路変更後の道路専用の車線である場合には、左右の方向案内ではなくて車線案内を行うことで、より理解しやすくなる。
(もっと読む)
ナビゲーション装置、表示制御方法、表示制御プログラム、および記録媒体
【課題】目的地までの経路全体の走行を支援すること。
【解決手段】ナビゲーション装置100は、移動体に搭載され、目的地までの経路を誘導する。探索部101は、目的地までの経路を探索する。取得部102は、移動体の現在位置の情報を取得する。表示制御部103は、現在位置の情報に基づいて、探索された経路上に移動体の現在位置を示す自車位置マークを表示させるとともに、経路上の自車位置マークの前後のいずれかに、または自車位置マークと同位置に、移動体の移動開始に伴って移動し且つ経路と同じ経路を辿る自車位置マークとは異なる他のマークを表示させる。
(もっと読む)
安全走行支援システム
【課題】車両のドライバからは見え難い部分の情報をドライバに報知する技術において、ドライバにとって必要なタイミングで情報の報知を行う。
【解決手段】安全走行支援システムは、車両20の始動時等に、ドライバの死角範囲47、48を特定し、特定した死角を完全に含むように、ドライバの指定に応じて、警告範囲60を設定し、設定した警告範囲60に他の車両がいることを起因として、車載カメラによる撮影画像をヘッドアップディスプレイに表示させる。
(もっと読む)
ナビゲーション装置、ナビゲーション方法およびプログラム
【課題】 道路標示のデータベースが不完全な場合であっても、従来より精度の高い経路案内を行えるナビゲーション装置を提供する。
【解決手段】 ナビゲーション装置10は、車両の現在位置を算出する車両位置算出部12と、道路標示のデータを記憶した道路標示DB26と、車両に搭載されたカメラ40の画像から道路標示を検出する道路標示検出部14と、道路標示DB26のデータを用いて、所定の探索範囲内にある道路標示の中に道路標示検出部14にて検出した道路標示と同じ種類の道路標示があるか照合することにより、検出した道路標示の位置を特定する照合部24と、検出した道路標示の位置が判定された場合には、その道路標示の位置に基づいて経路案内を行い、検出した道路標示の位置が特定されなかった場合には、車両位置算出部にて算出された車両の現在位置に基づいて経路案内を行うと決定する案内内容決定部30とを備える。
(もっと読む)
車載ナビゲーション装置
【課題】ユーザーの要望に応じて、より見やすい画像表示を行なうことが可能な車載ナビゲーション装置を提供すること。
【解決手段】車外設備から交通情報を受信する受信手段(40、45、50)と、該受信手段により受信された交通情報が道路画像に重畳表示されるように表示手段(22)を制御する制御手段(66)と、を備える車載ナビゲーション装置(1)であって、ユーザー操作により、前記交通情報のうち自車両が走行している走行道路から所定距離以内の並走道路に関する交通情報を表示しない、並走道路非表示モードの選択が可能なモード選択手段(22)を備え、前記制御手段は、前記並走道路非表示モードが選択されている場合には、前記並走道路に関する交通情報の表示を行なわないように前記表示手段を制御することを特徴とする、車載ナビゲーション装置。
(もっと読む)
車両の接触回避支援装置
【課題】交差点あるいは右折レーンにおいて接触回避支援動作が過剰とならないようにした車両の接触回避支援装置を提供する。
【解決手段】対向車が検出されるとき(S14)、自車と対向車の進路を予測し(S16)、予測された進路が重なる場合(S18)、対向車を障害物と認識して自車との接触の可能性を判定し(S20からS34)、対向車との接触の可能性があると判定される場合、対向車との接触回避を支援する接触回避支援動作を実行する(S36)車両の接触回避支援装置において、自車が交差点あるいはその近傍を走行しているか否か判定し(S22)、肯定されるとき、接触回避支援動作の実行を抑制、即ち、接触回避支援作動距離を小さく設定することで接触回避支援動作の実行を抑制する(S24からS30)。
(もっと読む)
車両の接触回避支援装置
【課題】法令上左側通行が義務付けられない環境を走行するような所定の走行状態においても対向車との接触の可能性を的確に判定して接触回避を支援するようにした車両の接触回避支援装置を提供する。
【解決手段】対向車が検出されるとき(S14)、自車と対向車の進路を予測し(S16)、予測された進路が重なる場合(S18)、対向車を障害物と認識し(S20)、自車が左または右に回避することを前提とする判定条件に従って自車との接触の可能性を判定し(S24,S28からS32)、対向車との接触の可能性があると判定される場合、対向車との接触回避を支援する(S34)車両の接触回避支援装置において、自車が駐車場などの道路以外の場所を走行するなどの所定の走行状態にあるか否か判定し(S22)、肯定されるとき、自車が左または右に回避することを前提とする判定条件に従って自車との接触の可能性を判定する(S26からS32)。
(もっと読む)
車載ナビゲーション装置
【課題】より見やすい画像表示を行なうことが可能な車載ナビゲーション装置を提供すること。
【解決手段】車外設備(100)から車線毎の交通情報を受信する通信手段(50)と、自車両の走行している車線を認識する走行車線認識手段(10、15、32、40)と、前記受信手段により受信された交通情報のうち、前記走行車線認識手段により認識された自車両の走行している車線についての情報を選択し、該選択した情報が表示されるように表示手段を制御する制御手段(60)と、を備える車載ナビゲーション装置(1)。
(もっと読む)
車載器及び情報配信システム
【課題】車載器を搭載した車両の進行方向が変更される場合であっても、進行方向の判別誤りを防止する。
【解決手段】環状道路の出入口に設置された第1路側無線装置と、放射道路又は環状道路に設置された第2路側無線装置と、リセットコマンドを含む第1配信情報を含むデータを第1路側無線装置に送信し、また、第2路側無線装置の路側IDとコンテンツ情報とを含む第2配信情報を含むデータを第2路側無線装置に送信するセンター装置と、第1配信情報及び第2配信情報を受信するDSRC部、今回IDと前回IDとの比較結果に基づいて進行方向を判別し、DSRC部により第1配信情報を含むデータが受信された場合、リセットコマンドに応じて進行方向の判別結果の初期化する制御部、を有する車載器と、を備えた情報配信システム。
(もっと読む)
ナビゲーション装置
【課題】走行中の車線が向かう方面をユーザが容易に把握できる「ナビゲーション装置」を提供する。
【解決手段】制御部17は、操作部4の所定操作による方面案内要求が発生したならば、現在走行中の車線を識別し、地図データに基づいて、現在走行中の車線が向かう方面を算定する。そして、このようにして現在走行中の車線が向かう方面を算定したならば、「この車線は向島方面に向かいます」といったような、現在走行中の車線が向かう方面を案内する音声メッセージを、音声生成部16にスピーカ3から出力させる。
(もっと読む)
車載器及び情報配信システム
【課題】進行方向とは異なる方向からの電波の漏洩による誤った情報の提供を防止し、車載器が搭載された車両の進行方向に応じた情報を提供する。
【解決手段】路側無線装置と、路側無線装置が設置された道路を識別するために予め設定された区別番号を含む第1配信情報又は発話情報と区別番号と第1配信情報に含まれる区別番号と第2配信情報に含まれる区別番号とに基づいて発話情報を実行させる実行条件情報とを含む第2配信情報を路側無線装置を介して予め設定された範囲内に送信させるセンター装置と、第1配信情報又は第2配信情報を受信するDSRC部、第1配信情報又は第2配信情報を記憶する記憶部、発話情報を実行する再生部、実行条件情報に基づいて発話情報の実行の可否を判別し判別結果に応じて発話情報を再生部に実行させる制御部、を有する車載器とを備えた情報配信システム。
(もっと読む)
路面標示認識装置
【課題】認識対象の路面標示と類似した形状の路面標示が存在する場合、実際の認識対象と異なる場所での誤認識が発生し、自車の位置が実際とは違う位置に算出される誤動作が発生する。
【解決手段】車両に搭載したカメラ108を用いて路面標示を認識させる際に、自車位置の周辺に、これから認識しようとしている路面標示と形状が類似している路面標示の有無に応じて、路面表示認識機能105の判定条件を変更する。類似した形状の路面標示が存在しない場合は、認識の判定条件とする画像上の特徴量の必要数を少なくし、路面標示のペイントのかすれ等の条件の悪い場合においても認識ができるようにする。一方、自車位置の周辺に形状が類似した路面標示が存在する場合は、認識の判定条件とする画像上の特徴量の必要数を多くし、類似した形状の路面標示において誤認識しないようにする。
(もっと読む)
ナビゲーション装置
【課題】設定したルートに沿った走行を行えるように車線変更を支援する「ナビゲーション装置」を提供する。
【解決手段】誘導ルート510として分岐点501を直進する経路が設定されている場合(b)、分岐点501までの道程距離がDとなる位置で車線変更是非確認要求が発生すると、分岐点501の手前の全ての車線で誘導ルート510に従って分岐点501を直進できるので、「この先、車線変更しても大丈夫です」との音声メッセージをユーザに対して出力する。一方、誘導ルート510として、分岐点501で右方向に分岐する道路に進む経路が設定されている場合(c)、車線変更是非確認要求が発生すると、分岐点501の手前の左車線では誘導ルート510に従って分岐点501で右方向に分岐できないので、「この先Dm、次の分岐手前で、右車線です」との音声メッセージを出力する。
(もっと読む)
141 - 160 / 308
[ Back to top ]