
Fターム[2F129GG07]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報の対象となる車両の構成部分 (2,045) | ウインカ (248)
Fターム[2F129GG07]に分類される特許
101 - 120 / 248
交差点案内方法及び交差点案内装置
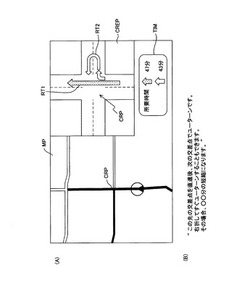
【目的】交差点案内に際して正規の進行方向より有利な進行方向が存在する場合、該進行方向を正規な進行方向共に交差点拡大図に識別可能に表示する「交差点案内方法及び交差点案内装置」を提供することである。
【構成】交差点における進行方向を案内するに際して、交差点CRPにおいて正規の進行方向RT1に向かって走行する場合より有利な進行方向RT2が存在するか判断し、存在する場合には、正規な進行方向と共に該有利な進行方向を交差点拡大図に識別可能に表示し、かつ、その理由を音声によりあるいは表示により出力する。
(もっと読む)
車両位置算出装置

【課題】 位置情報を取得した際の車両の向きによらず、現在の車両の位置を精度よく算出することができる車両位置算出装置を提供する。
【解決手段】 車両位置算出ECU1における進行方向検出部16は、受信エリア形状取得部12から出力された受信エリア形状情報、移動距離算出部13から出力された移動距離情報、および進路変更行動検出部14から出力された進路変更情報に基づいて、受信エリアにおける車両の進行方向を検出する。また、車両位置算出部17は、基準位置取得部11から出力された基準位置情報に基づいて基準位置(x,y)を設定し、相対位置変化検出部15から出力された相対変化情報に基づく相対変化(Δx,Δy)に、進行方向検出部16から出力された進行方向を加味して現在の車両位置を算出する。
(もっと読む)
車両周辺監視装置
【課題】カメラのレンズの特性や車体の形状に影響されず、簡易な構成でどのカメラからの画像が表示されているかを分かりやすく示す車両周辺監視装置を提供する。
【解決手段】車両に搭載され、当該車両の周囲を撮影する複数の車両周囲撮影手段と、車両周囲撮影手段が撮影する車両周囲画像を表示する表示器と、表示器に車両周囲画像を表示する要求が発生したか否かを判定する表示要求判定手段と、表示要求が発生したと判定され、表示器に、該表示要求に対応する車両周囲画像を表示する際に、該車両周囲画像を撮影した車両周囲撮影手段の搭載位置を識別可能とするための視覚効果を適用して該表示器に該車両周囲画像を表示する表示制御手段と、を備えることを特徴とする車両周辺監視装置として提供可能である。
(もっと読む)
車両用進行方向教示システム
【課題】車室内の乗員に対して自車両の進行方向をより的確に教示する。
【解決手段】本発明の車両用進行方向教示システムは、自車両の進行方向を検出するためのナビゲーション装置12と、車両用シートに着座する乗員の異なる複数箇所に対して触覚を付与可能な複数のアクチュエータ14と、着座乗員に対して触覚を付与する位置が自車両の進行方向に合わせて移動されるように、ナビゲーション装置12の出力情報に基づいて複数のアクチュエータ14を作動させるECU16と、を備える。着座乗員に対して触覚を付与する位置が自車両の進行方向に合わせて移動されるので、着座乗員に対して自車両の進行方向をより的確に教示することができる。
(もっと読む)
道路標識表示装置
【課題】道路標識の内容を認識が容易な状態で運転者に通知する。
【解決手段】道路標識毎に画面に表示する優先順位を設定したデータテーブルを格納した標識表示優先度データベース103cを有し、カメラ113画像から抽出し又は地図データベース102から経路案内処理部101により抽出した道路標識を、前記データテーブルで照合し、案内優先順位判定部103が、道路標識に付与された優先順位に基づいて、表示装置114に表示する道路標識を選別し、その道路標識を優先的に表示する。
(もっと読む)
車両用ナビゲーション装置及び車両用ナビゲーションプログラム
【課題】本線から導入レーンを経て分岐路に至る導入レーン付き分岐点を有する特別区間での分岐路に対する走行案内を適切なタイミングで行うことができる車両用ナビゲーション技術を提供する。
【解決手段】自車位置を検出する自車位置情報取得手段1と、前記特別区間を自車位置の前方の案内経路から検出する特別区間検出手段4と、自車が本線から前記特別区間の導入レーンに移行したことを検知する導入レーン移行検知手段5と、導入レーン付き分岐点に対する分岐案内を行うとともに、前記導入レーン移行検知手段が自車の導入レーンへの移行を検出したことに応答して、前記分岐路に対する走行案内を行う分岐案内手段62とを備えた車両用ナビゲーション装置。
(もっと読む)
道路標識表示装置
【課題】異国の道路標識の内容を翻訳し認識が容易な状態で運転者に通知する。
【解決手段】車両が走行している地域の道路標識と、運転者の母国における道路標識とを対応させて記憶している各国標識データベース103bを備え、カメラ113又は地図データベース102から経路案内処理部101により抽出した道路標識を、各国標識データベース103bで照合して、運転者の母国の道路標識に翻訳して表示装置114に表示する。この際、母国の道路標識に対応する意味の道路標識がない場合には、同等の意味となるように、母国の道路標識を組み合わせて表示する。
(もっと読む)
車両走行制御装置
【課題】 主要道路を走行中にナビゲーション装置などの自車両が走行環境を取得する手段によって主要道路を退出しようとしたと判断された場合に、運転者に与える違和感を少なくすることができる車両走行制御装置を提供する。
【解決手段】 走行制御ECU1は、目標車速設定部12で設定された車速に基づいて、ACC制御部13によって車速を制御する。加速意思取得部11では、運転者の加速意思を取得している。目標車速設定部12において、車両が高速道路の本線を走行中であるにも係わらず、誤って退出路を走行していると判定することがある。この場合、目標車速を低く設定して加速を抑制するが、このときに加速意思取得部11が運転者の加速意思を取得した場合には、目標車速を低くせず、加速の抑制をキャンセルする。
(もっと読む)
情報提供装置、情報提供方法、ならびに、プログラム
【課題】データ受信側にとって有益となるに相応しいタイミングでコンテンツを再生できるようにする。
【解決手段】車載器200において、データ取得部251はコンテンツデータを路側無線装置から取得して、データ記憶部260に記憶する。取得したコンテンツデータに予め指定された第1の再生条件が位置一致判別部255と方向一致判別部257と道路種別判別部259により満たされると判別されると、データ再生部253はコンテンツデータを再生する。第1の再生条件が満たされたときにデータ再生部253がコンテンツデータを再生できない場合、位置一致判別部255と方向一致判別部257と道路種別判別部259はコンテンツデータに予め指定された第2の再生条件を満たすか否かを判別する。第2の再生条件が満たされれば、データ再生部253はコンテンツデータを再生する。
(もっと読む)
情報提供装置、情報提供方法、ならびに、プログラム
【課題】データ受信側にとって有益となるに相応しいタイミングでコンテンツを再生できるようにする。
【解決手段】車載器200において、データ取得部251は路側無線装置からコンテンツデータを取得し、データ記憶部260は取得したコンテンツデータを格納する。取得したコンテンツデータに予め指定された再生条件が位置一致判別部255と方向一致判別部257と道路種別判別部259により満たされると判別されると、データ再生部253はコンテンツデータを再生する。また、データ表示部261はデータ記憶部260に格納されたコンテンツデータのリストを表示し、再生指示受付部262はコンテンツデータを再生する旨の指示入力をユーザから受け付け、データ再生部253は指示入力が示すコンテンツデータを再生する。
(もっと読む)
運転支援装置、運転支援方法、運転支援プログラム
【課題】進入不可能な道路への進入が予測される場合に運転支援を行う。
【解決手段】左折または右折の意図を検出した場合、進入可能かどうかを判断し、進入が不可能であると判断した場合に、代替道路を探索し、探索結果に関する情報を報知する。
(もっと読む)
運転支援装置及び運転支援方法
【課題】運転者個人の特性及び交差点固有の状況を踏まえた適切な運転支援を実行する。
【解決手段】安全確認検出部306は、直近の交差点に接近した際の運転者の安全確認動作を検出する。安全確認データ取得部307は、誘導情報入力部301が入力した誘導情報に基づいて、直近の交差点の予定される通行経路に対応する安全確認データ(交差点における運転者の安全確認に関するデータ)をデータベースから取得する。このデータベースは、個々の交差点の通行経路別の安全確認データを保存している。報知判定部308は、安全確認データ取得部307が取得した安全確認データと、安全確認検出部306の検出結果と、直近の交差点までの距離とに基づいて、運転者に対する報知が必要であるか否かを判定する。報知が必要であると判定されると、報知部309は、報知装置を介して運転者に報知を行う。
(もっと読む)
走行支援装置
【課題】 交差点における接触の慮を低減することが可能な走行支援装置を提供すること。
【解決手段】 走行支援ECU8によって、後続車の有無が判定され、その判定結果に基づいて、自車両の交差点への進入を抑制する進入抑制制御を実行するか否かを判断する。これにより、進入抑制制御を実行した場合には、自車両の交差点への進入を防止して、交差点内における接触の慮を低減することができる。また、進入抑制制御を実行しなかった場合には、自車両の急制動を回避して、自車両と後続車との接触の慮を低減することができる。
(もっと読む)
ナビゲーション装置
【課題】 道路地図データ上に含まれる交差点の誤りを検出し、これを修正することができる「ナビゲーション装置」を提供する。
【解決手段】 ナビゲーション装置は、自車位置を検出する位置検出手段と、交差点および交差点に接続されるリンクに関するデータを含む道路地図データを記憶する記憶装置と、位置検出手段により検出された自車位置に基づき道路地図データを参照し自車が通過する交差点へ進入する進入リンクとそこから脱出する脱出リンクを識別する識別部210、220と、交差点を通過するときのウィンカー情報が進入リンクと脱出リンクの案内コードに一致するか否かを判定する判定部240と、判定部240により一致していないと判定されたとき、案内コードに誤りがあることを示す誤り情報を記録する記録部250と、誤り情報に基づき案内コードを修正する案内コード修正部260とを含む。
(もっと読む)
車両位置算出装置
【課題】 位置情報を取得した際の車両の向きによらず、現在の車両の位置を精度よく算出することができる車両位置算出装置を提供する。
【解決手段】 車両位置算出ECU1における進行方向検出部16は、受信エリア形状取得部12から出力された受信エリア形状情報、移動距離算出部13から出力された移動距離情報、および進路変更行動検出部14から出力された進路変更情報に基づいて、受信エリアにおける車両の進行方向を検出する。また、車両位置算出部17は、基準位置取得部11から出力された基準位置情報に基づいて基準位置(x,y)を設定し、相対位置変化検出部15から出力された相対変化情報に基づく相対変化(Δx,Δy)に、進行方向検出部16から出力された進行方向を加味して現在の車両位置を算出する。
(もっと読む)
車載通信装置
【課題】路上機や他の車両から取得した情報の検索時間を短縮する車載通信装置を提供
【解決手段】地図データに含まれている全ての道路(以下、全道路という)を、2次元空間での位置(例えば、緯度・経度)に基づき、複数階層有する木構造を用いて、複数の領域に分割する。例えば、図(a)に示すように、「全道路」を、所定分割距離SD1(図(b)を参照)で複数の「道路」に分割して「道路1」,「道路2」,・・・,「道路k」とする(kは正の整数)。更に、分割された各「道路」について、図(b)に示すように、車線毎に分割して、「レーン1」,「レーン2」,・・・,「レーンm」とする。更に、分割された各「レーン」について、図(b)に示すように、道路の長さ方向に沿って所定分割距離SD2(例えば10m)で複数の「ゾーン」に分割して、「ゾーン1」,「ゾーン2」,・・・,「ゾーンn」とする(nは正の整数)。
(もっと読む)
車載ナビゲーション装置及びプログラム
【課題】側方映像に切り替える地点を登録する操作を省くことが可能な車載ナビゲーション装置及びプログラムに関する。
【解決手段】車載ナビゲーション装置1には、車両の前側方を撮像する撮像装置2及びGPS受信用のアンテナ3が接続されている。処理部14は、操作受付部22により切替操作を受け付けた場合、表示部20に表示されている道路地図画面を、撮像装置2から映像入力部21を介して与えられた側方映像に切り替えると共に、アンテナ3を介してGPS受信部11が受信した信号及びジャイロセンサ12からの信号により処理部14が検出した車両の走行位置を切替登録地点としてDRAM19に記憶する。また、処理部14は、車両の走行中に検出した走行位置がDRAM19に記憶されている切替登録地点から所定範囲内にある場合に、表示部20に表示されている道路地図画面を側方映像に切り替える。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】車両の走行するレーンを考慮することにより、車両が通行の規制されている規制道路へ進入する場合を確実に予測することが可能な運転支援装置、運転支援方法及びコンピュータプログラムに関するものである。
【解決手段】後方カメラ3で撮像した撮像画像から車両が現在走行する走行レーンを特定し、特定した走行レーンとウィンカーランプ7A〜7Dの点灯状態と道路形状とに基づいて、車両2が進行方向にある分岐点において、特に車両の通行が規制される規制道路へと進入することが予測された場合に、規制道路に関する警告を行うように構成する。
(もっと読む)
地物情報提供装置及び方法等
【課題】比較的簡易な構成で地物案内の精度を高めること。
【解決手段】本発明による地物情報提供装置は、自車位置を取得する自車位置取得手段と、自車前方の地物に関する情報を取得する地物情報取得手段と、前記自車位置取得手段により取得された自車位置と、前記地物情報取得手段により取得された地物情報とに基づいて、自車が接近している地物に関して地物案内を実施する地物案内手段とを備え、前記地物案内手段は、前記地物情報取得手段により地物情報が取得された地点又は時点から所定走行距離以上自車が走行し又は所定走行時間以上自車が走行し、且つ、自車が地物に対して所定距離内又は所定到達時間内に位置する場合に、前記地物案内を実施する。
(もっと読む)
運転支援装置及び運転支援システム
【課題】交差点に到達する予測到達時間の予測精度を向上させて、最適な運転支援が行える運転支援装置および運転支援システムを提供する。
【解決手段】車両の車速を取得する車速入力部20と、交差点までの距離情報を取得する距離情報入力部18と、交差点で右左折するか否かについての進行方向情報を取得する意思情報入力部11と、車速v0、距離S、進行方向情報に基づいて決定される交差点進入後の進行方向に基づいて、車両50が交差点に到達する予測到達時間tを算出する予測到達時間算出部15と、予測到達時間tに基づいて運転支援を行う支援判断部16とを備えることで、車両50が交差点に到達するまでの速度に変化がある場合も考慮して予測到達時間tを算出することができるため、予測到達時間tの予測精度が向上し、最適な運転支援を行うことができる。
(もっと読む)
101 - 120 / 248
[ Back to top ]