
Fターム[3C007BS03]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 3関節直角座標型 (108)
Fターム[3C007BS03]の下位に属するFターム
Fターム[3C007BS03]に分類される特許
61 - 80 / 91
マイクロマニピュレータ
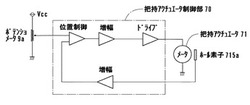
【課題】把持指開閉の微調整可能で操作性の高いマイクロマニュピュレータを提供する。
【解決手段】細胞ハンドリングシステムは、把持アクチュエータ71の駆動力により2本の把持指の先端部を近接させて細胞を把持するハンドリング部と、ハンドリング部をX、Y及びZ方向に移動させるX、Y、Z方向アクチュエータと、ポテンショメータ9aを有し、アクチュエータ71の駆動信号を入力するための第1コントローラと、X、Y、Zアクチュエータの駆動信号を入力するための第2コントローラと、ポテンショメータ9aから出力される電圧とホール素子715aから出力される電圧との差がゼロとなるようにアクチュエータ71の駆動を制御する把持アクチュエータ制御部70と、第2コントローラからの入力に応じたパルス数により、X、Y、Zアクチュエータの駆動を制御するX、Y、Zアクチュエータ制御部と、を備える。
(もっと読む)
基板搬送装置およびそれを用いた基板搬送方法

【課題】本発明の課題は、基板に反りや歪があっても、その基板にストレスを与えることなくそのままの状態で搬送できる基板搬送装置およびそれを用いた基板搬送方法を提供することである。
【解決手段】本発明の搬送装置1は、それぞれに3個ずつの吸着孔4a〜4c,4d〜4fを有し、ウェーハWを表裏両面から吸着挟持する上下のフォーク2,3と、上下のフォーク2,3を開閉動作させ、ウェーハWを挟み込んだり、開放したりする駆動部13a,13bと、吸着孔4a〜4c,4d〜4fの吸着圧力を一つ一つ個別に検知する圧力センサ6a〜6fと、その検知結果に基づいて、上下のフォーク2,3の開閉動作を制御する制御部11とを備えている。
(もっと読む)
ロボットにおける回転体干渉回避制御方法及び回転体干渉回避制御装置並びにこれを有する塗装装置
【課題】複雑な形状の回転ワークの場合であっても、ロボットとの干渉を起こすことなく、良好な塗装品質を得ることのできる、ロボットにおける回転体干渉回避制御方法及び回転体干渉回避制御装置ならびにこれを用いた塗装装置を提供する。
【解決手段】本発明にかかる、回転中心の周りに回転する回転テーブル上に載置されたワークの外形表面に対し、前記回転中心を原点として前記ワークに対して作用するようにロボットアームを駆動するロボットの制御方法は、前記回転テーブルの回転位置を検出し、制御プログラムにより、前記検出された前記回転テーブルの回転位置に基づいて前記回転テーブルの回転中心に対するロボットアーム位置を指令し、この指令されたロボットアーム位置と前記ワークの位置との距離が干渉の可能性に相当する基準値以下の場合には、ロボットアーム位置を前記ワークから遠ざけるように指令することを特徴とする。
(もっと読む)
位置決め装置
【課題】簡単な構造でベローズにねじり力が作用せず、密閉容器内の被操作体を容器外から良好に回転、直進運動させることを可能にする。
【解決手段】複数の操作棒6を、密閉容器7を密閉するために該密閉容器7とZ軸ステージ4の上面プレート5の間に、ベローズ9内を貫通させて配設することにより気密性を図る。前記ベローズ9におけるZ軸ステージ4の上面プレート5の接続面と、該ベローズ9における密閉容器7との接続面とにおいて、中心位置を偏心させて取り付ける。
(もっと読む)
マーキング装置およびマーキング方法
【課題】 所定の設置物を据え付ける据付面に効率よく据付位置をマーキングすること。
【解決手段】 据付面16に当接して据付面16に印を付けるスタンプ56と、スタンプ56の軸線と一致する光軸を有し、据付面16上にスタンプ56の現在位置を投影するポイントレーザ52と、スタンプ56をポイントレーザ52とともに移動させることによって、据付面16上に投影されるスタンプ56の現在位置を変更するXYアーム44と、据付面16を撮影するカメラ60と、カメラ60の撮影画像における据付位置とスタンプ56の現在位置との差分を求めるとともに、該差分に対応する距離だけXYアーム44によりスタンプ56をポイントレーザ52とともに移動させ、撮影画像における据付位置とスタンプ56の現在位置とが一致した状態でスタンプ56により据付面16上の据付位置Pに印を付ける制御を行う制御装置26を備えた。
(もっと読む)
付着式ピンセット用移載システム
【課題】付着式ピンセットに対して好適な新規の移載システムを提供する。
【解決手段】
微細部品を付着するための粘着材、この粘着材を先端に導くための導出パイプ、この導出パイプ先端に粘着材を送り出す手段、導出パイプ先端より突出及び後退して、付着した微細部品を離脱するスライドパイプからなる付着式ピンセット1を搭載するキャリア5と、このキャリア5を水平方向に走行案内する走行レール2,3と、キャリア5を上下方向に昇降案内する昇降レール4と、キャリア5を走行及び昇降レール2,3,4に沿って駆動する手段20,30,40と、スライドパイプを前進及び後退する手段とを備えた。
(もっと読む)
成形品取出機
【課題】障害物検知を確実に行えるようにし、成形品取出機における移動部位の移動制限が本当に必要なときだけ行って生産性の低下を抑制する。
【解決手段】成形品取出機1には、取出ヘッド3の移動経路上に侵入した人等の障害物を検知するための超音波センサ6と、障害物が検知されると取出ヘッド3を移動制御するための処理器7とを設ける。処理器7は、超音波センサ6の発信部61からの超音波発信間隔が不規則的となるか、発信周波数が送信波発信毎に異なるように制御し、受信部62で受信した反射波の応答時間に基づく超音波の反射位置が複数回の超音波発信で連続して同じ結果とみなせる場合に障害物有りと判定し、この障害物の位置と取出ヘッド3の現在位置との位置関係に応じて移動部位の移動制御指令を出力する。
(もっと読む)
リニアモータを使用した直交ロボットの軸用移動装置
【課題】 リニアモータを使用した直交ロボットの軸用移動装置の可動子がその移動の際にケーブル等の引きずるという欠点をなくし、安全な可動子側にリニアモータコイルを持つ直交ロボットの軸用軸用移動装置を提供することにある。
【解決手段】 リニアモータを使用した直交ロボットの軸用移動装置おいて、ステータ側に固着された永久磁石と、可動子側に設けたコイルと、同コイルの両端部に夫々取付けられ、可動子に固着した接触子と、この接触子の反コイル側先端に対向したステータ側のフレームに取付けられ、可動子の移動にもかかわらず常に接触子に接触するように可動子の移動方向に伸びた電気を送るための送電板とを有して成ることを特徴とするリニアモータを使用した直交ロボットの軸用移動装置とした。
(もっと読む)
植物の対象部分の位置特定方法とその方法による対象部分の位置特定装置及びその装置を用いた作業用ロボット
【課題】 変化する光環境下においても収穫すべき果実などの位置特定が素早くできる方法を提供する。
【解決手段】対象部分の全色系のカラー画像から特徴的な色を固有色として選択する固有色選択工程と、その固有色の色データを明暗に関する色要素を除いた二つの色要素から色彩空間データを得る色要素2元化処理工程と、その色彩空間データをモニタ画面に表示してさらに特徴的な少数の色を選別してこれを色彩パターンデータとして記憶させる色彩パターン登録工程と、実作業において、作業すべき対象部分が存在する周辺をデジタルカメラで撮影し、その撮影した全色系のデジタルカラー画像から、明暗に関する色要素を除いた二つの色要素の色彩空間データを得る作業域色要素2元化処理工程と、その色彩空間データと記憶されている色彩パターンデータとを照合し、作業域の画像中に両者が合致した部分のみを位置表示させる対象部分位置表示工程とで構成される。
(もっと読む)
ローダの位置教示装置
【課題】ローダが本来停止すべき位置からどれくらい、どの方向に外れているのかを視覚的に判断できて、作業者がローダ位置を簡単に修正できるローダの位置教示装置を提供する。
【解決手段】ローダの位置教示装置は、対象機械1のチャック2に対するローダチャック14の上下左右の相対位置を検出する相対位置検出手段31を備える。また、この相対位置検出手段31の出力に従い、対象機械1のチャック2の位置とローダチャック14の位置を表示装置34の画面上に図で表示する相対位置表示手段35を有する。作業者の入力操作によって前記移動機構16を動作させてローダチャック14の位置を変更するローダ操作手段36と、作業者の入力操作が行われることでローダチャック14の現在位置をワーク渡し位置として前記停止位置記憶手段23に記憶させる教示位置指定手段37を備える。
(もっと読む)
成形品取出機のチャック制振方法
【課題】チャックの移動停止時に、少なくともチャックの振動周期及び振幅を検出し、該データに基づいてチャックの移動を制御することによりチャックの移動停止時における振動を確実に制振する。検出された振幅データに基づいて移動停止時におけるチャックの振動強度を確認する。
【解決手段】少なくともチャック17の移動停止時に振動検出器25からの信号に基づいてチャック17の振動周期及び振幅を検出してチャックの移動制御手段19に出力し、検出されたチャック振動の周期データ及び振幅データに基づいてチャック17を移動制御してチャック移動停止時における振動を制振すると共に振幅データにより振動強度を確認可能にする。
(もっと読む)
ティーチング装置、およびティーチング方法
【課題】 保持部を精度よく、目標位置に配置することができ、製造に手間を要しないティーチング装置、ティーチング方法を提供することである。
【解決手段】ティーチング装置5は、搬送装置1の保持部11に保持される第一の部材51と、載置台2に取り付けられるとともに、保持部11を、目標位置近傍に接近させた際に、保持部11に保持された第一の部材51と対向する第二の部材52と、出力部55と、演算部540と、第一の記憶部534と、第一の検出手段533とを有する。第一の部材51は、第二の部材52の第一の部材51との対向面からの距離を示すセンサ信号を生成する距離センサ512を有する。また、第二の部材52の第一の部材51との対向面には、基準マークAが形成されている。第一の部材51は、基準マークAを含む画像を撮像して画像データを生成する撮像手段513を有する。
(もっと読む)
搬送装置
【課題】取出機等の搬送装置において各機器の設置精度等にかかわらず且つ比較的簡易な設定作業によって開放エリア内でパレタイジングを確実に行えるようにする。
【解決手段】制御部は自動運転前に成形品を取出すヘッドを移動させてコンテナーにおける直交するXY軸の各々の軸線上で選択された実際の開放位置点P1,P2を設定開放位置点P1’,P2’と対比してXY軸の各々のズレ量△X,△Yを求めて設定開放位置を実際の開放位置と一致するように軸補正する。
(もっと読む)
搬送装置
【課題】 主駆動源に負荷される負荷重量が過剰に増大するのを回避し、かつ、補助駆動源による移動体へのバランス荷重付与能力の低下を抑えることによって、主駆動源や補助駆動源などの振動や「きしみ」を防止して、これらの耐久性を向上させることができる搬送装置を提供する。
【解決手段】 進退機構により移動体4を進退させてワークを搬送する搬送装置1において、移動体4を進退させるための主駆動源5と、該主駆動源5に負荷される負荷重量を相殺するバランス荷重を移動体4に付与する補助駆動源6とで進退機構するとともに、補助駆動源6を移動体4に隣接した位置に設けることで、補助駆動源6の力点を通る直線C3から移動体4の中心を通る直線C2上にある補助駆動源6の作用点までの距離L2を短縮する。
(もっと読む)
操作装置と操作子の動作調節方法とそのためのプログラム
【課題】操作子に適度な操作反力を再現する技術を提供する。
【解決手段】 操作装置は、人が操作する操作子と、操作子に再現する摩擦力を速度の関数によって記憶している記憶手段と、操作子の位置を検出する手段と、操作子の位置を用いて中間速度を単位時間毎に計算する手段と、中間速度と摩擦力関数を用いて摩擦力を単位時間毎に決定する手段と、中間速度と摩擦力を用いて操作子の目標位置を単位時間毎に計算する手段と、操作子の位置と操作子の目標位置を用いて、操作子に加える反力を単位時間毎に計算する反力計算手段と、反力計算手段によって計算された反力を操作子に加えるアクチュエータを備えている。
(もっと読む)
微小物体ハンドリングシステム
【課題】マイクロマニピュレータへのX軸及びY軸方向の駆動指令を誤っても、中断することなく操作を続行可能な微小物体ハンドリングシステムを提供する。
【解決手段】モニタの画面中心Oをエンドエフェクタの先端部の初期位置に設定し、顕微鏡の倍率と、画面中心Oから水平及び垂直画面端までの距離に相当するX方向及びY方向の初期位置からの実距離との関係を表す相関テーブルとから実距離(Xmax,Ymax)を演算し、初期位置から実距離(Xmax,Ymax)間を駆動するための駆動許容パルス数(PXmax,PYmax)を演算しておき、駆動許容パルス数(PXmax,PYmax)を越えるX及びY方向ステッピングモータへのパルスの出力を制限する。エンドエフェクタの先端部が画面の画像表示範囲を越えて駆動しない。
(もっと読む)
部品吸着方法及び装置
【課題】簡単な方法で、短時間に、しかも正確に部品収納トレイに収納されている部品を吸着することができる部品吸着方法及び装置を提供する。
【解決手段】部品供給位置に移動した収納トレイ31に収納されている部品を吸着ヘッド11により吸着する。吸着ヘッドに搭載された撮像装置12が、予め定められた収納トレイの部品収納位置P1、P2、P3に移動され、そこに収納されている部品または部品収納部が撮像され、その画像処理結果から部品吸着位置の補正値が求められる。このような構成では、選択された位置P1、P2、P3以外の他の位置での補正値は、例えば直線補間により求めることができるので、収納部個々を認識する必要がなく、全体としての認識回数が顕著に減少するので、吸着タクトを短縮することができる。
(もっと読む)
データ及び計算の二重化、駆動系の照合によるロボットの操作方法
【課題】 保存データの内容破壊や化けに対処でき、システム破損や動作上の計算が狂った場合や駆動系が経時変化等で正しく動作しなくなった場合においても不具合を生じさせない、データ及び計算の二重化、駆動系の照合によるロボットの操作方法を提供する。
【解決手段】 ロボットの固定データをバックアップデータとして予めメモリ上に格納しておき、装置の運転開始時に、読み込んだデータとバックアップデータとを照合させる工程と、ロボットの操作状況を画像認識すると共に検算用データを取得する工程と、画像認識の結果によりロボットの補正動作を行うと共にロボットの補正移動後の座標を取得する工程と、ロボットの補正移動後の座標データと検算用データとを照合する工程と、からなることを特徴とする。
(もっと読む)
力覚コントローラ装置及びその制御方法
【課題】 操作をパワーアシストするとともに、手触り感など微妙な感覚を操作者に効率的に伝達することができるようにする。
【解決手段】 本発明の力覚コントローラ装置1は、制御対象15に対する操作を入力するための操作端2を含む操作機構3と、該操作端2に加えられたトルクを検出する操作力検出部5と、操作端2の現在位置を検出する現在位置検出部6と、制御対象15に加わる外力を入力する外力入力部8と、操作端2を駆動する駆動部9と、前記操作力に応じて操作端2に対する操作をアシストするとともに、外力Dに応じて操作端2に力覚を提示するように、前記操作力及び前記外力を任意の比率で合成した力に基づいて操作端2の目標位置を算出し、該目標位置及び前記現在位置に基づいて操作端2を該目標位置に追従させるように駆動部9を制御する力覚制御部10とを備えている。
(もっと読む)
ロボット制御装置
【課題】 1台のカメラで自動ティーチングを実現したロボット制御装置を提供すること。
【解決手段】 直交する3軸(X、Y、Z軸)に沿って移動可能な直交座標ロボットを制御するロボット制御装置が、ロボットが押圧する操作面を撮像する撮像手段と、操作面に平行なXY平面上をロボットと共に移動し、ロボットのZ方向延長線と操作面との交点にポインタを照射する照射手段と、ロボットの操作面への圧力検出手段とを備え、ロボットのXY方向移動ベクトルを撮像画像上でのポインタ移動ベクトルに変換するベクトルを算出し、撮像画像上での操作者指定の所望点までのポインタ移動ベクトルをXY方向移動ベクトルに変換してロボットを移動させ、撮像画像上でポインタが所望点から所定の範囲内に位置するか判断し、否であれば補正し、このXY平面位置と、ロボットをZ方向に移動させ、検出圧力が所定値を越えたときのZ方向位置とを所望点と関連付けて記憶する。
(もっと読む)
61 - 80 / 91
[ Back to top ]