
Fターム[3C007BS03]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 3関節直角座標型 (108)
Fターム[3C007BS03]の下位に属するFターム
Fターム[3C007BS03]に分類される特許
21 - 40 / 91
電動保持装置
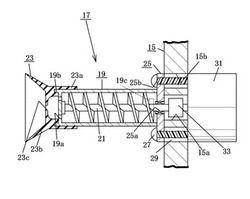
【課題】真空発生装置からのエアー配管を不要にし、エアー消費量を低減し、消費電力の低減に寄与できる保持装置を提供すること。
【解決手段】電動モータ31を回転駆動してスクリュー部材21を所定方向へ回転させて吸着パッド23内の空気を吸引して他方端部の通気孔19cから排気することにより吸着パッド内を真空形成してワークを吸着して保持する一方、電動モータを上記と逆方向へ回転駆動してスクリュー部材を上記と逆方向へ回転させて他方端部の通気孔から流入する空気を圧縮して一方端部の通気孔を介して吸着パッド内に供給することにより真空破壊してワークの吸着を解除する。
(もっと読む)
産業用ロボット

【課題】搬送対象物の重量が変動しても、ハンドに搭載される搬送対象物の傾きを適切に補正することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボット1は、搬送対象物2が搭載されるハンド3と、搬送対象物2が搭載されたときのハンド3の撓みによる搬送対象物2の傾きを補正する傾き補正機構17とを備えている。傾き補正機構17は、駆動源となる傾き補正用モータと、傾き補正用モータの出力軸に連結される偏心回転部材と、偏心回転部材に下端側が取り付けられるリンク部材と、リンク部材の上端側が取り付けられる取付部材とを備えている。傾き補正機構17は、偏心回転部材の回転に伴ってリンク部材とともに上下動する取付部材によって、支点部36を回動中心として搬送対象物2の傾きを変化させる方向にハンド3を回動させている。
(もっと読む)
パレタイズ装置
【課題】パレタイズ装置において、簡単な構成により、ワークやパレットに寸法ばらつきがあっても、パレタイズ時のワーク間の干渉やパレタイズされたワーク間の隙間の発生を防止して柔軟に、且つ高速にパレタイズ可能とする。
【解決手段】本装置1は、ワークを把持するハンド部2と、ハンド部2を移動させるアーム部3と、積載したワークの位置情報を取得する計測部5と、前記情報を記憶する記憶部6と、各部の動作を制御する制御部10と、を備えている。制御部10は、ワークを把持したハンド部2を移動させてパレットにワークを積載した際に、計測部5によってそのワークの積載位置を取得して記憶部6に記憶させ、次のワークをパレットに積載する際に、記憶部6に記憶されている積載位置に基づいて、ワークの積載予定位置を決定する。既積載ワークの積載位置を基準にするので、ワークやパレットの寸法変動に対応でき干渉や隙間の発生を防止できる。
(もっと読む)
片持ビームを備えた成形品取出機
【課題】 片持ビームの重心変位による該片持ビームの上下方向の撓みの反復や揺動が発生するのを抑えて、成形品取り出し精度、つまり移動体の仕事精度の低下を回避するとともに、片持ビームの基部を片持支持部材に結合する締結手段の早期劣化を回避できる片持ビームを備えた成形品取出機を提供する。
【解決手段】 トラバース型の成形品取出機1における横行フレーム(片持ビーム)3には、該横行フレーム(片持ビーム)3に支持された移動体18の進退に伴う横行フレーム(片持ビーム)3の重心変位を抑制する重心変位抑制ウェイトからなる重心変位抑制手段15を設ける。
(もっと読む)
成形品取出機
【課題】 ティーチング等の手動操作が行いやすいコントローラを備え、しかも、成形品取出機本体の制御部を複雑化しなくてすむ成形品取出機を提供する。
【解決手段】 成形品取出機1は、成形品取出機本体3と主コントローラ5と副コントローラ7を備えている。副コントローラ7は、主コントローラ5の下位に存在しており、副コントローラ7からの設定は主コントローラ5を経由して伝達される。作業者は、使用用途に応じて主コントローラ5又は副コントローラのいずれを操作するかを決定することができる。
(もっと読む)
マニピュレータ及びマニピュレータシステム
【課題】キャピラリを所定位置にセッティングするときに操作者による誤動作を防止可能なマニピュレータを提供する。
【解決手段】このマニピュレータは、微小対象物を操作するためのキャピラリを圧電素子92により微動駆動する微動機構と、キャピラリを3軸方向に駆動する駆動手段と、圧電素子が発生する電圧を検知する電圧検知手段97と、電圧検知手段による電圧検知に基づいてキャピラリの他部分への接触状態を監視する監視手段45,98と、を備える。
(もっと読む)
マニピュレータシステム及び微小操作対象物の操作方法
【課題】微小な操作対象物の交換作業を自動的に可能なマニピュレータシステム及び微小操作対象物の操作方法を提供する。
【解決手段】キャピラリ25,35を駆動対象として、外周側にねじ部を有するねじ軸と、回転軸を回転駆動するモータと、回転軸に固定されて、ねじ軸をその軸方向への移動を自在に支持するねじ要素と、圧電素子への印加電圧に応じて回転軸を微動駆動させる微動機構と、微動機構を伴って三次元空間を移動してキャピラリの位置を制御する三次元軸移動テーブルと、を有する一対のマニピュレータ14,16と、マニピュレータに操作される微小な操作対象物を観察する顕微鏡手段12と、マニピュレータの駆動を制御する制御手段43と、マニュピレータを駆動する操作手段47と、を備え、操作対象物を操作する際に、マニピュレータをシーケンス駆動することで、操作後の操作対象物と操作前の操作対象物との交換を自動化した。
(もっと読む)
マニピュレータ、マニピュレータの駆動方法、マニピュレータシステム及び微小操作対象物の操作方法
【課題】容易な位置決めとインジェクションとを同時に満たすことができるマニピュレータを提供する。
【解決手段】このマニピュレータ1は、操作試料に対してインジェクションを行なうものであって、XYZ軸方向に駆動可能であり、少なくともインジェクションを行なう軸方向の圧電素子6を駆動源とするナノポジショナ7と、圧電素子に対して信号を印加することにより圧電素子を微動動作させる制御部10aと、を有する。
(もっと読む)
マニピュレータ制御装置及びマニピュレータ制御方法
【課題】作業者が注目している作業映像から目を離す必要がなく、また操作中のデバイスから手を離したり、別の手で補ったりすることなく、XYZの運動指令と同一の入力デバイスで、並進3自由度の他に、マニピュレータ先端の回転等を操作するマニピュレータ制御装置及びマニピュレータ制御方法を提供する。
【解決手段】駆動部5aと、駆動部5aにより回転可能な回転軸部5bと、回転軸部5bの先端に設けられ、各種作業を行う作業部51とを有するマニピュレータ5と、作業部51の直交する3方向の並進運動及び回転軸部5bの回転運動を指示する入力デバイス2と、入力デバイス2の指示した動作をマニピュレータ5に伝える制御部3と、を備え、入力デバイス2は、本体20と、本体20に対して回転及び傾倒可能な回転操作子23を有し、本体20は、平面内の移動に応じて、作業部51の直交する2方向の移動量を指示し、回転操作子23は、傾倒に応じて、回転軸部5bの回転を指示することを特徴とする。
(もっと読む)
把持装置および方法
【課題】把持装置および方法において、把持開口の大きさを正確に設定することができ、安定した把持動作を行うことができるようにする。
【解決手段】把持装置が、把持ユニットに対して動作制御値を送出して把持ユニットの動作を制御する把持機構制御部117と、把持部材によって形成される把持開口の大きさを算出するための画像処理部112と、複数の動作制御値に対して画像処理部112で算出された把持開口の大きさから、動作制御値に対する把持開口の大きさとの関係を表す校正データを生成する校正データ生成部113と、校正データを記憶するデータ記憶部116と、把持ユニットに対する動作制御値データをデータ記憶部116に記憶された校正データに基づいて生成して、把持機構制御部117に送出する装置制御部115とを備える。
(もっと読む)
作業装置及びその校正方法
【課題】画像計測時にマーカの中心部を含む部分が遮蔽されていても作業部の位置の校正を行うことを可能とする。
【解決手段】作業装置は、被作業物体に対して作業を行う作業部と、マーカ中心点から放射状に複数のマーカが配置された校正治具とを有し、複数のマーカは、立体的に配置されており、校正治具は、作業部に対して設定された校正用の基準点とマーカ中心点とが一致するように作業部に装着されている。
(もっと読む)
工業用ロボット
【課題】 補助装置の位置を微修正することにより、マニピュレータの特異点を回避する。
【解決手段】 補正移動装置目標値演算部27は、特異点判別部26が特異点近傍を判別すると、次時刻のツール先端のワークに対する位置及び姿勢を維持しつつ、次時刻のマニピュレータの姿勢が特異点近傍範囲外となるように、補助装置目標値Jsta(t)を補正して補正補助装置目標値Jsta(t)'を算出する。第2座標変換演算部28は、補正補助装置目標値Jsta(t)'を使用して、ツール目標値worldPta(t)をマニピュレータ座標系Σbaseに変換する。補正目標関節角度演算部29は、マニピュレータ座標系Σbaseに変換されたツール目標値worldPta(t)''の逆キネマティクス演算で補正目標関節角度Jmta(t)''を算出する。補正目標関節角度Jmta(t)''と補正補助装置目標値Jsta(t)'がマニピュレータ11と移動装置12に出力される。
(もっと読む)
放射性廃棄物汚染検査装置およびその制御方法
【課題】放射性廃棄物汚染検査装置の暴走を抑制する。
【解決手段】放射性廃棄物汚染検査装置に、複数の可動要素と、可動要素に設けられて検知手段の取り付け部と、可動要素を移動させるモータ3などの駆動手段と、可動要素の相対的な位置を検知して位置信号として出力するエンコーダ4などのセンサと、を有する多関節移動機構12と、位置信号に基づいて可動要素のそれぞれの位置を算出する現在位置算出部21と、可動要素の位置を記憶する位置記憶部22と、取り付け部の目標位置と現在の位置とに基づいてモータ3などを駆動させる駆動信号を生成する駆動信号生成部23と、可動要素の前回の前記動作ステップでの位置と現在の位置との変化が所定の最大位置変化量より大きい場合に多関節移動機構12の動作を停止させるインターロック部24と、を有するコントローラ16と、を備える。
(もっと読む)
自動試験装置
【課題】Z軸方向に所定の負荷をかける機器の試験を行う自動試験装置において、Z軸方向へ所定の負荷をかける加重制御の管理可能な加重の幅を広くする。
【解決手段】X軸方向、Y軸方向、Z軸方向にそれぞれ移動するX軸移動ユニット2、Y軸移動ユニット3、Z軸移動ユニット4を備えた自動試験装置において、前記Z軸移動ユニット4に固定されX軸方向の下方に延びたアーム404の下端部に取り付けられた加重制御ユニット401と、前記加重制御ユニットの下側に取り付けられた作用子402を備え、前記加重制御ユニット401は、前記上側固定板401aに設けられた孔401eに上側固定板401aには摺動自在となるように貫設し、上部に前記下側稼動板401bの下方向の移動を係止する係止部を具備した圧縮バネ案内軸401dと、前記圧縮バネ案内軸401dに案内される圧縮バネ401cから構成されている。
(もっと読む)
試料作成装置および試料姿勢転換方法
【課題】 簡便に試料小片の姿勢を90度、180度、あるいは任意の角度だけ回転させて試料台に固定可能な装置を提供すること。
【解決手段】 試料7の表面とマニピュレータ回転軸2の交点を一端とする試料表面に垂直な線分をマニピュレータ回転軸2の周りに回転して得られる円錐側面と、試料表面の2つの面によってつくられる交線11に、試料小片の特定の方向を一致させた後、試料小片をマニピュレータで支持し、マニピュレータ回転軸2を動作させることを特徴とする試料作成装置。
(もっと読む)
マニピュレータ、マニピュレータシステム、マニピュレータ用画像表示装置及びマニピュレーションシステム
【課題】細胞等の微小微小対象物に対しキャピラリによるインジェクション操作を行う際に、かかる操作のための動作を確実に精度よく繰り返して行うことが可能なマニピュレータ及びマニピュレータシステムを提供する。
【解決手段】このマニピュレータは、ナノポジショナの構造を有し、キャピラリの微動動作を行うことで微小対象物に対するインジェクションが可能であって、キャピラリの動作を制御する制御部43と、制御部に対しキャピラリの動作を指示するために操作者により操作される操作部47,49と、を備え、操作部が、その指示の少なくとも一部を押されることで実行するボタン操作部47a,47bを有し、ボタン操作部を押すことで、キャピラリによるインジェクション操作の少なくとも一部の動作が行われる。
(もっと読む)
ハンドリング装置
【課題】狭い作業領域で効率よくワークを搬送できるハンドリング装置を提供する。
【解決手段】水平方向に伸長するガイドレール11、ガイドレールに沿って移動する可動キャリッジ20、可動キャリッジに設けられてワークを取り扱うハンドリングロボットRを備え、ハンドリングロボットRは、可動キャリッジに対して上下方向に伸縮自在に設けられたテレスコアーム30、テレスコアームに保持されると共に水平面内で旋回して伸縮又は屈曲動作を行うべく互いに連結された複数の旋回アーム40,50、複数の旋回アームの最も先端側に設けられたハンドユニット60を含む。これによれば、複数の旋回アームが水平面内で二次元的に移動するものであるため、上下方向の剛性が高く、質量の大きいワークでも停止時に振動やブレ等の発生を防止でき、狭い作動範囲において、安定したハンドリング操作を行える。
(もっと読む)
一体化されたウェハ受渡し機構
一体化された高速ロボット機構が、搬送機器を改良し、対象物移動を位置合わせ又は識別等の別の機能と一体化するために開示されている。開示された一体化されたロボットアセンブリは、通常、対象物をチャンバに出し入れするためのエンドエフェクタと、中心合わせ及びシータ位置合わせ能力を提供するためにロボットボディに組み込まれた回転チャックと、搬送中に対象物を識別するための選択的な識別サブシステムとを有する。本発明は、複数の一体化されたロボットアセンブリと、受渡しシステムとを有する受渡しロボットシステムも開示しており、この場合、受渡しロボットシステムは、FOUP又はFOSB、フロントエンドモジュール(FEM)、又はソータ等の複数の結合されたチャンバのために働く。移動するロボットへのこれらの組み込まれた能力の使用により、1つの対象物受渡し操作が、毎時500パーツを超えることができる。  (もっと読む)
(もっと読む)
磁気プローブ、同磁気プローブの製造方法および同磁気プローブを備える微粒子配置装置
【課題】極めて小さい微粒子を単体で安定して保持することができるとともに、同保持した微粒子を極めて小さい間隔で配置することが可能な磁気プローブを提供する。
【解決手段】磁気プローブ10は、先端部12が尖った円筒状のプローブ本体11を備えている。プローブ本体11の内周面には鉄による被膜Ciが形成されており、先端部12における被膜Ciは磁性部13を構成する。プローブ本体11の外周面にはパーマロイによる被膜Coが形成されており、先端部12における被膜Coは磁性部14を構成する。磁性部13と磁性部14とは鉄柱15およびワイヤ16を介して磁気的に接続されている。鉄柱15の外周面にはコイル23が配置されている。コイル23に通電させると、磁性部13から磁性部14に向けて磁力線が生じ磁気プローブ10の先端部12に局所的な磁界が形成されて微粒子Pを保持することができる。
(もっと読む)
半導体試験装置及び該装置における半導体デバイスの品種切替方法
【課題】低温環境下での半導体デバイスの試験における該デバイスの品種切替作業時間を短縮させることができる試験装置及び品種切替方法を提供することにある。
【解決手段】外部装置に電気接続されるソケットユニット110と、半導体デバイス107を取り上げるコレットユニット130と、コレットユニットをソケットユニットに組み合わせて押圧することにより、コレットユニットにより取り上げられた半導体デバイスをソケットユニットに電気接続するチャックユニット150と、チャックユニットの軸方向の移動動作及び軸回りの回転動作のみにより、チャックユニットとコレットユニットの着脱が可能な着脱機構136、153を備える。これにより、半導体デバイスの品種を切り替えるときに、切替品種に対応するチャックユニットとコレットユニットとを自動的に着脱させて交換することができ、デバイスの品種切替作業時間を短縮させることができる。
(もっと読む)
21 - 40 / 91
[ Back to top ]