
Fターム[3C007CS08]の内容
マニピュレータ、ロボット (46,145) | 基台 (1,360) | 無軌道で移動するもの (1,271)
Fターム[3C007CS08]に分類される特許
41 - 60 / 1,271
ロボット制御システム
【課題】スマートフォン等の携帯情報端末を利用して遠隔制御を行うロボットを制御するロボット制御システムを提供することを課題とする。
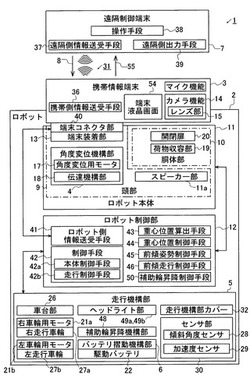
【解決手段】制御システム1は、ロボット2と、無線通信回線31と接続可能な携帯情報端末3と、ロボット2を制御する制御情報8を送出する遠隔制御端末7とを具備する。ロボット2は、携帯情報端末3を着脱自在に装着可能な頭部9及び胴体部10からなるロボット本体11と、ロボット本体11の下方に取設され、一対の走行車輪21a,21bを有する倒立二輪機構を採用した走行機構部5と、遠隔制御端末7から送出された制御情報8を携帯情報端末3を通じて受付け、ロボット2の動作制御及び走行制御を行うロボット制御部12とを具備して主に構成されている。
(もっと読む)
荷物移送用ロボットと該ロボットの制御方法

【課題】棚の上などにおいた荷物を所定位置に好適に押すことのできる荷物移送用ロボットを提供する。
【解決手段】荷物移送用ロボット1であって、車輪2dを有するベース2と、ベース2に対して傾動可能に設けられるボディ3と、ボディ3をベース2に対して傾動させる傾動装置8と、ボディ3に対して動作可能に設けられるアームと、アームをボディ3に対して動作させる動作装置10,11と、制御装置12を有する。制御装置12は、傾動装置8を制御してボディ3をベース2に対して傾動させてボディ3の傾動方向の反対側にスペース18を形成し、かつスペース18を形成した時に動作装置10,11を制御してスペース18にアームの一部または全部を移動させる制御モードを有する。
(もっと読む)
ロボットの動作生成システム及び動作生成方法
【課題】達成させたい作業の動作を一度で確実に生成可能とし、短時間で動作生成を実行可能とする。また、軌道の計画可能性を保証しつつ、簡単な環境では短時間で軌道計画を可能とする。
【解決手段】複数のアームを備えるロボットの動作生成システムであり、アームの関節軸情報を示すノードと、当該ノード間を接続するエッジと、を有するグラフ構造をアームごとにグラフ構造データ格納部151に格納し、グラフ構造探索処理部154が、各アームに設定された優先度に従って、アームごとのグラフ構造を用いて、スタートノードからゴールノードまでを結ぶ経路を探索し、ノード有効性判定部155が、探索された経路に含まれるノード環境情報と干渉するか否かを判定し、干渉していると判定した場合には、当該ノードをグラフ構造から除外する。
(もっと読む)
ロボットおよび補間方法
【課題】ロボットを構成する2つの制御ユニットA,Bにおいて、制御ユニットBが制御ユニットA上に設置されている場合に、両方の制御ユニットを同時に動かしながら、制御ユニットBの制御点に対して所望の補間動作ができるようにする。
【解決手段】制御ユニットBのユニットコントローラBに対して、制御ユニットAの制御点ACに対する指令Aも与える。ユニットコントローラBは、指令Aを制御周期ごとに補間計算し、制御ユニットBのユニット座標系Bにおける制御点BCの補間位置を計算することで、制御ユニットBのアクチュエータの補間位置を計算し、アクチュエータを制御するという手順で処理する。
(もっと読む)
トルク検出装置およびロボット装置
【課題】無限回転する回転体の回転トルクを適正に検出することができるトルク検出装置を提供する。
【解決手段】トルク検出装置は、ベース部20と、駆動部30と、検出部40とを具備する。駆動部30は、第1の軸Lx方向に主軸を有する回転子31と、回転子31を上記主軸の周りに回転させる固定子32とを有する。検出部40は、起歪体41と、検出素子42とを有する。起歪体41は、ベース部20に固定される第1の端部と回転子31に固定される第2の端部とを有し、回転子31と同心的に配置される。検出素子42は、起歪体41に取り付けられ、ベース部20に対する起歪体41の、回転子31の駆動反力に起因する上記軸Lx周りへの歪みを検出する。
(もっと読む)
外骨格型ロボット
【課題】従来の外骨格型ロボットにおいては、体幹・下肢部の運動支援を適切に行えない。また、電動モータや油圧アクチュエータを用いる事例があるが、大きな負荷を発生するものは装置の自重が大きい。また、負荷を支えるだけの場面においてもアクチュエータがエネルギーを消費するために、エネルギー効率が悪い。
【解決手段】ベースと下半身とを有する外骨格型ロボットであって、左右の足首、左右の膝、および腰の左右の各位置に配置されている能動の関節である能動関節と、能動関節を動作させる制御部とを具備し、能動関節は、エアマッスルと電動モータとを具備する外骨格型ロボットにより、上記の課題が解決できる。
(もっと読む)
歩行ロボットのZMP制御装置
【課題】ファッションモデルのように膝の伸展した優美な2足歩行を実現する2足歩行ロボットのZMP制御装置を提供する。
【解決手段】腰関節を追加して、膝が完全に伸展した場合であっても、腰関節をロール軸周りに回転させることによって右脚を下げ左脚を上げてZMPを右足部に移動させる、あるいは、右足を上げ左脚を下げることによってZMPを左足部に移動させることによって、ZMP制御を可能とし、さらに、ZMP制御の制御遅れを補償するために逆システムあるいはモデルマッチング制御を用いる。
(もっと読む)
ロボットおよび行動制御システム
【課題】第1運動体の運動態様を規範とさせながらも、第2運動体に固有の制約に鑑みて適当な運動態様で当該第2運動体に指定タスクを実行させることができる行動制御システム等を提供する。
【解決手段】本発明の行動制御システム2によれば、人間(第1運動体)およびロボット1(第2運動体)の身体スケールの相違に加えて、ロボット1の構造上または機能上の制約条件が充足されるように規範運動態様{f1(q)}がスケール変換されることにより、ロボット1の目標運動態様{f2(q)}を定める目標内的特徴因子f2(q)が設定される)。さらに、ロボットの目標内的特徴因子f2(q)がスケール逆変換された結果f3(q)に基づき、運動モデルが再定義される。
(もっと読む)
移動型ロボットシステム
【課題】 自律移動や自律作業が可能な移動型ロボットにおいて、充電による可動範囲の制限や作業内容の制限を受けずに、作業を継続可能な技術を提供する。
【解決手段】 移動して所定の作業を自律的に実行する移動型メインロボット(10A)と、その移動型メインロボット(10A)に対して装着可能であるとともに移動型メインロボット(10A)とは別に移動可能な移動型サブロボット(20A,20B,20C,20D)と、その移動型サブロボット(20C)に対して充電を実行する充電装置(30)とを備える。移動型メインロボット(10A)は、電気エネルギを供給するメインバッテリ(11)を備える。前記移動型サブロボットは、前記の移動型メインロボット(10A)に装着された場合に前記メインバッテリ(11)へ電気エネルギを充電する内蔵バッテリを備える。移動型メインロボット(10A)に装着されていない場合であって内蔵バッテリの電気エネルギが少ない場合には、充電装置(30)へ自律移動して充電する。
(もっと読む)
人間協調ロボットシステム
【課題】人間がロボットに接触しうる環境においても人間の安全を確保する。
【解決手段】ロボット(2)と人間(1)とが領域を共有して協調作業を行う人間協調ロボットシステムにおいて、ロボットの先端に取付けられた作業機器(3)に設置されるかまたはロボットに設置された力センサ(4)を具備し、力センサの検出値が所定の値を超えた場合には記ロボットを停止または力センサの検出値が小さくなるようにロボットの動作を制御するようになっており、ロボットは、人間から力センサの設置位置よりも遠位に位置する第一ロボット部位(6)と、力センサの設置位置よりも人間に対して近位に位置する第二ロボット部位(7)とを含んでおり、ロボットシステムは、ロボットが人間に最も接近した場合においても人間による第一ロボット部位への接触を防止するように人間の作業領域を制限する制限部(5)を具備する。
(もっと読む)
移動ロボット
【課題】従来の移動ロボットにあっては、毛状体束を振動させてその復元力を推進力とするものでは、移動速度が遅くて増速が困難であり、回転体の回転力を推進力とするものでは、装置構造が複雑になるという問題点があった。
【解決手段】前後に縦列配置した前方胴部1及び後方胴部2と、前方胴部1及び後方胴部2を互いに近接離間させるための推進力付与手段3を備え、前方胴部1及び後方胴部2の外周面に、弾力性を有し且つ後方へ傾斜した多数の推進用外毛4を備えている移動ロボットR1としたことにより、移動速度の制御を容易にし、装置構造の簡略化を実現した。
(もっと読む)
脚式歩行ロボット及びその足軌道決定方法
【課題】アクチュエータへの負荷が過大とならないように脚式ロボットの足軌道を決定する方法を提供する。
【解決手段】本明細書が開示する脚式歩行ロボットの足軌道決定方法は、経路決定ステップと一歩時間決定ステップを含む。経路決定ステップは、足の離地位置から着地位置に至る足の移動経路を決定する。一歩時間決定ステップは、足が離地してから着地するまでに要する一歩時間として、移動経路の長さを足の平均移動速度で除した値を求める。決定された移動経路と一歩時間が足の軌道に相当する。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの実際の姿勢と目標とする姿勢とのずれの低減に寄与しない床反力成分が発生するのを極力防止するように床反力を操作する。
【解決手段】脚式移動ロボット1の実際の姿勢と目標とする姿勢とのずれの程度を表す姿勢状態量偏差を“0”に近づける機能するフィードバック操作量としての実ロボット外力操作量に応じて床反力を操作したと仮定した場合の全床反力中心点(制限前補償ZMP)が、存在許容領域を逸脱する場合に、実ロボット外力操作量が“0”であると仮定した場合の全床反力中心点の目標位置(目標ZMP)と制限前補償ZMPとを結ぶ線分と、存在許容領域の境界線との交点が、全床反力中心点(制限後補償ZMP)となるように、実際の床反力の目標を決定する。
(もっと読む)
人間型歩行ロボット用脚とその足
【課題】人間型歩行ロボット用脚と足において、人間の脚や足による動作に類似した動作を実現するとともに人間の足に近いプロポーションを実現し、爪先関節にて異物の巻き込みの抑制を実現する。
【解決手段】能動軸43と第一支軸32aと第四支軸32dと第六支軸32fを4つの節とする第一平行リンク機構と、第二支軸32bと第三支軸32cと第五支軸32eと第六支軸32fを4つの節とする第二平行リンク機構を備え、かつ、第一支軸32aと第二支軸32bと第六支軸32fと仮想支軸を4つの節とする仮想的な平行リンク機構である仮想平行リンク機構を備え、踵側足が床面と接触する足裏面である踵側足裏面は、仮想支軸を含有するとともに仮想支軸を境とする半平面上に構成されるとともに、爪先側足が床面と接触する足裏面である爪先側足裏面は、仮想支軸を含有するとともに仮想支軸を境とする半平面上に構成した。
(もっと読む)
マーシャロイド(MARTIALOID)
【課題】宇宙で生体が生存競争するためのマーシャルアート(martial art)のメカニズムを有していて、勝負服一式の型で、宇宙へ生体が遠征するためのヒューマノイドロボットが今までなかった。
【解決手段】宇宙へ生体が遠征するためのヒューマノイドロボットに宇宙で生体が生存競争するためのマーシャルアートのメカニズムをそなわせたり、ヒューマノイドロボットを勝負服一式の型にしてヒューマノイドロボット本体内にヒューマノイドロボット本体内の生体が呼吸したりヒューマノイドロボット本体内の温度を調節するためのあたたかいもしくはつめたい酸素を自動で入れるためのメカニズムと酸素の入れ物を有する密室製の生命維持装置をそなわせたりすることでヒューマノイドロボットを用いて宇宙へ生体が遠征することが出来るようになる。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの実際の姿勢と目標とする姿勢とのずれを低減するように実際の該ロボットに作用させる床反力を操作することが過剰に制限されるのを防止し、該床反力の操作によって該姿勢のずれを低減することの効果を高める。
【解決手段】脚式移動ロボット1の実際の姿勢と目標とする姿勢とのずれの程度を表す姿勢状態量偏差を“0”に近づける機能するフィードバック操作量としての実ロボット外力操作量に応じて床反力を操作したと仮定した場合の全床反力中心点(制限前補償ZMP)が、ロボット1の複数の脚体2が着床状態となる期間内において方形状と異なる形状の領域に設定した存在許容領域を逸脱する場合に、全床反力中心点が存在許容領域のうちの制限前補償ZMPに最も近い位置(制限後補償ZMP)になるように、実際の床反力の目標を決定する。
(もっと読む)
移動体の充電装置及びその制御方法
【課題】一方の引張り出し検知センサが故障した場合であっても、配線部材が所定以上に引張り出されたとき、異常処理を行うことが可能な移動体の充電装置を提供する。
【解決手段】充電スタンド2は、ケーブル5aの第1の引張り出しを検知する第1の引張り出し検知センサ7と、ケーブル5aの第2の引張り出しを検知する第2の引張り出し検知センサ8を備える。制御装置4は、第1の引張り出し検知センサ7による検知に基づいて第1の制御指令を出力し、第2の引張り出し検知センサ8による検知に基づいて第2の制御指令を出力する。
(もっと読む)
クローラユニット及びクローラ型走行ロボット
【課題】内部への異物の混入を防止するクローラユニット及びクローラ型走行ロボットを提供する。
【解決手段】複数のホイールと、複数のホイールに巻かれ且つ複数のホイールが回転するとその外周を周回するクローラベルト5とを備えたクローラユニット2が、クローラユニット2の少なくとも一方の側面を覆う側面カバー4を具備し、側面カバー4の周縁と対応するクローラベルト5の側周縁とが全周に亘って結合し、側面カバー4がクローラベルト5の周回と共に回転する。
(もっと読む)
撮像面位置検出装置およびそれを具える作業ロボット
【課題】対象物の撮像面の位置を簡易かつ安価に、しかも短時間で検出する装置を提供することにある。
【解決手段】レーザ光軸が互いに交差するように配置された少なくとも3台のレーザ光照射手段と、前記少なくとも3台のレーザ光照射手段に対する所定位置で、それらのレーザ光照射手段からレーザビームを照射された対象物の表面を撮像する1台の単眼の撮像手段と、前記撮像手段が前記対象物の撮像面を撮像した1枚の画像での前記レーザビームの少なくとも3つの照射点の位置と前記撮像手段の撮像光軸との位置関係から幾何学的演算により前記撮像手段に対する前記対象物の撮像面の距離と向きとを求めて出力する演算手段と、を具えてなる、撮像面位置検出装置である。
(もっと読む)
逆運動学を用いた動作・姿勢生成方法及び装置
【課題】
多自由度リンク系において、各々のリンクとの対応付けを全く必要としない形状情報を入力として逆運動学計算を行う。
【解決手段】
多リンク系モデルの形状を決定する一般化座標を逆運動学により取得する動作・姿勢生成方法である。形状を表す特徴量を参照値とし、形状を表す特徴量は、幾何学的な形状を形成する複数の第1特徴点の位置情報から計算された第1の高次特徴量であり、多リンク系モデル上には、当該モデルの特定のリンクと夫々関連付けられた複数の第2特徴点が定義されており、複数の第2特徴点の位置情報から第2の高次特徴量を計算し、第2の高次特徴量と第1の高次特徴量との差を最小化するように、第2の高次特徴量、第2の高次特徴量の一般化座標に対するヤコビ行列、一般化座標を数値計算により更新することで、多リンク系モデルの一般化座標を取得する。
(もっと読む)
41 - 60 / 1,271
[ Back to top ]