
Fターム[3C007CS08]の内容
マニピュレータ、ロボット (46,145) | 基台 (1,360) | 無軌道で移動するもの (1,271)
Fターム[3C007CS08]に分類される特許
21 - 40 / 1,271
二足歩行ロボットの股関節構造
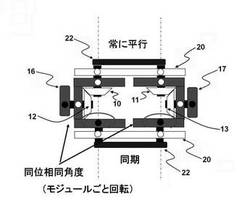
【課題】傾斜角度のある斜面での直進歩行を実現し、軽量化および製作コストを削減したロボットを提供することを目的とする。
【解決手段】胴体部及び該胴体部に連結される左右の脚部を有する二足歩行ロボットにおいて、左脚部に連結する左サイドギア、該左サイドギアに噛合される左ピニオンギアとを備える左モジュールと、右脚部に連結する右サイドギア、該右サイドギアに噛合される右ピニオンギアとを備える右モジュールと、前記2つのモジュールを平行リンク又は同径のプーリで結合させ、胴体部に対して常に同位相同角度で傾斜するように拘束し、さらに前記各ピニオンギアを同径のプーリで同期させることにより前後の脚部運動が逆位相同角度となるように拘束することを特徴とする。
(もっと読む)
ロボットによるサービス提供システム、ロボット管理装置及びロボット管理方法

【課題】人間のように柔軟性の高い知識構造を実現可能とする。
【解決手段】ロボット3によるサービス提供システム1は、それぞれ異なる性質の情報元から得られる情報に基づいて各レイヤーが生成され、かつ、各レイヤーにおいて、所定の観点から要素間の関係性が構築されている複数のレイヤーであって、当該複数のレイヤーを備える知識NW11と、ユーザからの要求タスクに含まれる情報に基づいて、知識NW11が備えるレイヤーから前記情報に関連する要素を抽出し、その抽出した要素と前記情報との関係性を記述することで、要求タスクに応じたタスクベースオントロジーを生成するオントロジー生成部12と、生成したタスクベースオントロジーを用いて、ロボット3の動作を制御するロボット動作制御部13と、を備える。
(もっと読む)
移動ロボット
【解決手段】移動ロボット10は、移動速度データベース88を含み、人と共存する様々な環境内を自律的に移動する。移動速度データベース88には、人の移動速度の傾向を表す代表値に応じて定められる最大移動速度が、環境内の各エリアのそれぞれと対応付けて記憶される。移動ロボット10は、移動する際には、現在地に対応する最大移動速度を移動速度データベース88から読み出して設定し、設定した最大移動速度を上限とした移動速度となるように移動する。
【効果】周囲の人と調和した移動が可能となるので、周囲の人の邪魔になることなくスムーズに移動できる。
(もっと読む)
荷搬送アームおよび荷搬送アームを備えた荷搬送ロボット
【目的】複雑な制御を必要とせず荷物を傷つけずに保持できる荷搬送アームおよび荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体には、左右一対のアームを設け、アームの前腕21には、荷を当接支持する手先部30を軸35に回転可能に設けた。手先部30は、荷に当接する当接面30Aを有し、当接面30Aを前腕21の長手方向に垂直に付勢するねじりコイルバネ36の一端を固定し、ねじりコイルバネ36の他端は前腕21に固定されている。荷搬送ロボットは、荷の表面に当接面30Aを当接させるように前腕21を可動させ、荷の表面の向きに合わせて手先部30を軸35を中心に回転させる。当接面30A全体を荷の表面に当接させた状態で、前腕21を可動させ、手先部30を介して軸35にて荷の荷重を受けて、荷を移動させる。
(もっと読む)
ロボットの移動制御システム、ロボットの移動制御プログラムおよびロボットの移動制御方法
【構成】移動制御システム100は、役割データベース(20)を備える中央制御装置10および役割が設定されたロボット14を有する。また、役割データベース(20)は、役割を持った人間の代表移動行動データから構成される。たとえば、ロボット14に「話しかけやすい警備員」の役割が設定されている場合、「話しかけやすい警備員」の代表移動行動データが役割データベース(20)から選択される。また、中央制御装置10では、役割が設定されたロボット14の複数の将来位置および各将来位置における行動が代表移動行動データに基づいて予測され、予測された複数の行動のそれぞれの発生確率が算出される。そして、算出された発生確率に基づいて、ロボット14に移動行動が指示される。
【効果】システムの管理者は、役割が設定されたロボット14を、同じ役割を持った人間と同じように動作させることができる。
(もっと読む)
装着型動作支援装置
【課題】腰部フレームと、腰部フレームの上部に接続されて装着者の肩に係留される背部フレームと、腰部フレームの下部に接続されて装着者の下肢に係留される下肢フレームとを備えた身体装着型動作支援装置であって、装着者の歩行時に装着者の骨盤の揺動に起因する背部フレームの揺れを抑制することを目的とする。
【解決手段】装着型動作支援装置10に、装着者の左右方向に長尺な基部31を有する腰部フレーム30と、腰部フレーム30の下部に接続される左右一対の下肢フレーム50,50と、腰部フレーム30の基部31の上部に接続される背部フレーム40と、背部フレーム40と腰部フレーム30の基部31とを接続する接続部70とを備える。接続部70は、前額面上の1自由度の回転機構であって、例えば、四節リンク機構で構成される。
(もっと読む)
ロボットシステム
【課題】自走式のロボットを適用して、被検者である人間に対して所定の処置を確実にかつ低コストで行うことができるロボットシステムを提供する。
【解決手段】移動可能なロボット100と、シート状に形成され、上面における被検者200の位置および姿勢を検出するシートセンサ10と、シートセンサ10に設けられ、シートセンサ10により検出された被検者200の位置および姿勢に関する情報、ならびに、シートセンサ10の位置および向きに関する情報を送信する第一,第二送信部23,32と、ロボット100に設けられ、第一,第二送信部23,32により送信される情報を受信する受信部111と、ロボット100に設けられ、受信部111により受信した情報に基づいて、ロボット100が被検者200に対する所定の処置を行うようにロボット100を制御するロボット制御部112を備える。
(もっと読む)
ロボット
【課題】電動モータの駆動力の増大を抑制した態様にて、ロボットの伸縮動作を確保すること。
【解決手段】フレーム間の相互変位に応じて伸縮可能に構成されたロボット100であって、ロボット100の基端側から先端側へ順に配置されるべきフレーム14、13、15と、電動モータ1から供給される駆動力に基づいてフレーム13を先端側へ駆動する駆動手段と、駆動手段と協調してフレーム13を先端側へ付勢する付勢手段と、駆動手段及び付勢手段によるフレーム13の先端側への搬送に同調して、前記フレーム13からみてフレーム14、15を互いに逆方向へ搬送する搬送機構と、を備える。例えば、付勢手段は、ガススプリングから構成される。
(もっと読む)
脚式ロボット
【課題】手部の指部の把持面が4足歩行時に損傷するのを回避し、4足歩行時に圧覚センサを用いた制御によってロボット本体の姿勢の安定性の向上を図る。
【解決手段】4つの肢部をもつ脚式ロボットの上肢部に設けられた手部209,212を用いて、ナックル歩行により安定な4足歩行を行う。右手部209には、2本の指部101a,102aの指背面125a,126aに接地検出用の手部圧覚センサ107a,112aが設けられている。また、左手部212には、2本の指部101b,102bの指背面125b,126bに接地検出用の手部圧覚センサ107b,112bが設けられている。これら手部圧覚センサ107a,112a,107b,112bを用いてナックル歩行時の姿勢が制御される。
(もっと読む)
寸法測定装置および寸法測定装置を備えた荷搬送ロボット
【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
自律移動サービス提供システム
【課題】券売機等で利用者によるサービス要求の呼出行為に応じて自律移動ロボットが利用者との間の本人照合を通して迅速に対応し、作業効率を高め、かつサービスの品質を高めることができる自律移動サービス提供システムを提供する。
【解決手段】この自律移動サービス提供システムは、所定の位置に居る利用者300の要望に応じて利用者との間で音声会話または表示情報を介して通信を行う手段23,24,26、利用者に係る音声データまたは画像データを取得する手段31,32,33、音声データまたは画像データと利用者の位置データを送信する手段28を備える専用端末200と、位置データに基づいて利用者の居場所までの移動経路を自動生成する手段52、利用者との間で音声会話または表示情報を介した通信に基づき本人照合を行う手段55、利用者の要求する案内サービスを提供する手段52を備える自律移動ロボット400とから構成されている。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
触覚センサシステム
【課題】触覚センサの配置密度が部位毎に異なるロボットに、触覚センサからの出力信号を情報統合装置へ中継する中継装置を配置するに際し、中継装置の好適な配置態様を提供する。
【解決手段】ヒューマノイドロボット1の触覚センサシステム100は、ヒューマノイドロボット1のロボット本体2の表面に配置された複数のセンサノード200と、複数のセンサノード200から出力された出力信号を中継する中継部401を有するリレーノード120と、リレーノード120の中継部401によって中継された出力信号を受信して処理するホストノード140と、を備える。複数のセンサノード200をヒューマノイドロボット1のロボット本体2の部位に応じて少なくとも2つ以上の区分に区分し、各区分毎に、リレーノード120を配置した。
(もっと読む)
会話ロボット
【課題】状況に応じた自然な会話を行い得る会話ロボットを提案する。
【解決手段】会話ロボット1では、主注目対象角度θ1及び従注目対象角度θ2を算出し、これら主注目対象角度θ1と従注目対象角度θ2とを全て合算した後、認識したユーザ(ユーザA及びユーザB)の総数で除算して重心方向角度θCG1を算出し、胴体部正面8bをこの重心方向角度θCG1まで回動させる。このように、会話ロボット1では、胴体部正面8bを重心方向角度θCG1まで回動させることで、重心方向に胴体部正面8bを向けさせて、ユーザAだけでなくユーザBに対しても、あたかも注目しているかのような印象を与えることができ、かくしてユーザA又はユーザBとの間で状況に応じた自然な会話を実現し得る。
(もっと読む)
ロボット及びその制御方法
【課題】経路計画の計算量を低減することができるロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1の制御方法は、認識部21と、記憶部22と、ハンド部133が設けられたアーム13と、を備え、周囲に障害物91が存在する対象物90にハンド部133を接近させるようにアーム13の動きを制御するロボットの制御方法である。ロボット1は、認識部21により、対象物90の位置情報と、障害物91の固有の情報と、を取得する。ロボット1は、障害物91の固有の情報に対応して記憶部22に予め格納され、ハンド部133が障害物91を回避して対象物90に向かう軌道に関する軌道情報を取得する。そして、ロボット1は、軌道情報に基づいて、アーム13の動きを制御する。
(もっと読む)
移動ロボット用肢体駆動機構、およびこの肢体駆動機構を用いた移動ロボット
【課題】複雑な制御が不要でありながらも安定した動作が可能であり、また、低コストで製造可能であり、さらに、ロバスト性に優れた移動ロボットと、この移動ロボットに対して適用可能な移動ロボット用肢体駆動機構とを提供する。
【解決手段】移動ロボット用肢体駆動機構20は、複数のサーボモータ24a,24b,24c,24dとリンク機構とを備え、長手方向に伸びる肢体本体部24を回転駆動させるための機構であって、肢体本体部24は移動ロボット10に回転自在な状態で取り付けられ、複数のサーボモータ24a,24b,24c,24dはそれぞれ、互いに平行に配置される出力軸23a,23b,23c,23dを備え、複数のサーボモータの出力軸のうち少なくとも1つはリンク機構に接続して、当該リンク機構を介してサーボモータの出力で肢体本体部24を回転駆動する。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物の移動時及び静止時にかかわらず脚の特徴を抽出して人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と略垂直な平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定してレンジデータを出力する走査部と、レンジデータを所定周期でサンプリングしてセグメントを形成し、セグメントに基づいて脚の特徴を抽出する抽出部と、抽出した特徴の運動特性及び幾何情報に基づいて人物を検出する検出部を備え、抽出部は、最短距離近傍法を用いて取得した2つのセグメントペアの移動特性に基づいて、各セグメントペアが静止している静止セグメントを分類する静止特徴強分類器と、各セグメントペアが移動している移動セグメントを分類する移動特徴強分類器を含み、分類されたセグメントの特徴に基づいて2つのセグメントペアから脚ペアを抽出するように構成する。
(もっと読む)
窓ガラスなどの清掃装置
【課題】建造物のガラス製壁面或いは窓面などに真空吸着し且つこれに沿って移動しながら清掃作業を施す装置を提供する。
【解決手段】横並びで配置された3式の吸着ユニットにおいて、吸着ユニットの各々は、吸着ユニットを表面と交差する方向に出入りさせる吸着ユニット前後方向出入手段80を具備し、隣り合った吸着ユニット同士は、吸着ユニット前後方向出入手段を介して横方向伸縮手段62により連結されて横一列吸着ユニット群を構成しており、隣り合った該横一列吸着ユニット群同士は、該吸着ユニット前後方向出入手段を介して縦方向伸縮手段68により連結される。吸着ユニットの各々は、表面に吸着しながら且つ該表面に沿って移動される吸着可動状態と、該表面に係止される吸着係止状態と、表面から隔離しながら且つ該表面に沿って移動できる非吸着可動状態、の以上3つの状態のいずれかを選択できる。
(もっと読む)
ロボット及びその制御方法
【課題】簡易な構成により作業時の安定性を確保できるロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1は、ロボット本体11、アーム12、台車13、センサ14を備える。アーム12は、ロボット本体11に連結され、関節機構及び伸縮機構のうち少なくともいずれか一方を有する。センサ14は、ロボット本体11の周囲に存在する物体を検知する。ロボット1は、アーム12が稼働する場合、台車13によりセンサ14が検知した物体に接近し、ロボット本体11の一部を当該物体に当接させる。
(もっと読む)
21 - 40 / 1,271
[ Back to top ]