
Fターム[3C007ES03]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 指部材を有するもの (1,203) | 2つ (446)
Fターム[3C007ES03]に分類される特許
81 - 100 / 446
ロボットアームのためのハンドカメラ装置
【課題】 ハンドに突出部を形成することなく、しかも、ロボットアームの制御系を複雑にすることなく、把持した把持対象物を正確に目標位置に移動、位置決め可能とする。
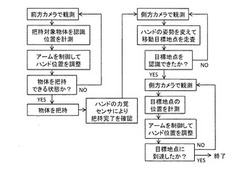
【解決手段】 ロボットアームのハンドに、把持対象物の位置及び方向を観測するカメラを設置し、その撮像情報に基づいて把持対象物を認識し、ハンドで把持させた後、目標位置を探索及び認識して、把持対象物を目標位置に移動させるロボットアーム及びハンドの制御装置において、ハンドの把持部に前方カメラを設けるとともに、側方にも側方カメラを設置し、ハンドが把持対象物を把持する直前あるいは直後において、前方カメラの撮像情報に基づく制御から、側方カメラの撮像情報に基づく制御に切り換える切換手段を具備させ、把持した把持対象物に視界を妨げられることなく、把持対象物を正確に目標位置に移動、位置決めすることができる。
(もっと読む)
把持ロボットおよび把持方法

【課題】少ない計算コストで、確実かつ完全に、対象物を把持する技術を提供する。
【解決手段】把持ロボットは、アーム部と前記アーム部に設けられた1対のハンド部と前記1対のハンド部のそれぞれに設けられた指部とを有し、台上の対象物を把持する把持部と、前記把持部に設けられ、前記対象物を撮像するカメラ部と、前記把持部および前記カメラ部を制御する制御部とを備え、前記制御部は、前記カメラ部によって撮像された撮像画像内における重力方向を特定し、前記撮像画像内における重力方向に基づいて前記撮像画像内において前記対象物と前記台との境界部を検出し、前記境界部の位置に基づいて前記台と前記対象物との間に前記1対のハンド部のそれぞれの指部を挿入するように前記把持部を制御する。
(もっと読む)
把持装置
【課題】真空排気設備を必要としない簡易な構成で、当接部を硬化させることができる把持装置を提供する。
【解決手段】袋部材6a内を減圧させることにより、粒状物12を任意の形状を保持しつつ硬化させる、ワーク20と当接する部位である各当接部6・6・6、を有する把持部2を備え、袋部材6aの内部と外部を連通する連通配管8と、連通配管8が形成する流通経路における流体の流れ方向を袋部材6aの内部から外部へ向かう方向に規制する逆止弁9と、袋部材6aと逆止弁9を連通する連通配管8を分岐して延設した連通配管8が形成する流体の流通経路上に配設する開閉弁10と、を備え、各挟圧部4b・4b・5bによりワーク20を挟持して、各当接部6・6・6をワーク20に押圧することにより、袋部材6a内の空気を、袋部材6aの外部に流出させて、袋部材6a内を減圧する。
(もっと読む)
把持装置
【課題】耐磨耗性および耐切創性に優れ、かつ、良好な把持状態が保持できるとともに、容易に交換ができる当接部を備え、さらに当接部の交換が容易でありながら、当接部が該当接部の付設部に対して変位することを防止できる把持装置を提供する。
【解決手段】ワーク50を挟圧する各挟圧部4b・4b・5bを有する各爪部4・5と、弾性素材からなる内袋11と、該内袋11に充填される粒状物12と、を備え、内袋11内を減圧して、内袋11の内容積に対する粒状物12の体積比率を増大させることにより、粒状物12を任意の形状を保持しつつ硬化させる、各挟圧部4b・4b・5bのワーク50と当接する部位に付設される各当接部6・6・6と、を有する把持部2を備える把持装置1であって、各挟圧部4b・4b・5bの各当接部6・6・6を付設する付設面4g・4g・・・に、凹凸形状を有する各係止部10・10・・・を形成する。
(もっと読む)
電動チャック
【課題】電動アクチュエーター或いはメカニカルチャックが故障した場合に部品交換が容易であり、汎用性が高く、メカニカルチャックにおけるフィンガーのワークに対する芯出し作業を手動で簡単に行える電動チャックの提供。
【解決手段】モータ9と、その回転出力軸に回転が止められて螺合した直動出力軸11とを備えた電動アクチュエーター3に、プッシャー22が押圧されることによりワーク把持用のフィンガー35が開かれ、プッシャー22が押圧されていない時はバネの力でフィンガー35が閉じるメカニカルチャック4を着脱可能に取り付けてある。回転出力軸に直動出力軸11を軸方向に調整できるハンドル19を固定する。ハンドル19は放熱部材を兼ねたアルミ合金製とすることがある。
(もっと読む)
ロボットハンド
【課題】新たな機能を搭載したロボットハンドを提供する。
【解決手段】ボール14やブロック15といった物体を挟み込んで把持するために複数の指本体5を備えたロボットハンド1は、以下のように構成されている。即ち、指本体5には、その指本体5の把持面8と反対側の反把持面10に、例えば手提げバッグ12といった他の物体を引っ掛けることが可能な引っ掛け部11が形成されている。引っ掛け部11は、指本体5の反把持面10に凹状に形成されている。各指本体5の先端部5cには、把持側に突出した突部9が形成されている。
(もっと読む)
把持装置と方法
【課題】一度に、複数の対象物を把持して搬送できるようにすることにある。
【解決手段】対象物1を挟んで把持する1対の把持爪3a、3bと、1対の把持爪を動作可能に支持して空間内を移動する支持移動体7と、を備える。1対の把持爪3a、3bは、支持移動体7に対して往復動方向に駆動されることで、互いに近接して対象物1を挟み、または、互いに離間して該対象物を解放するようになっている。さらに、1対の把持爪3a、3bの間に位置し、1対の把持爪が把持した対象物1を保持する保持機構8を備える。1対の把持爪3a、3bに把持された対象物1が、当該把持から解放されるように保持機構8内の奥側に移動させられて、当該奥側で保持機構8に保持され、この状態で、1対の把持爪3a、3bが、別の対象物1を把持できるように構成されている。
(もっと読む)
把持装置と方法
【課題】互いの隙間を狭くして複数の対象物を配列した場合であっても、より容易に、対象物を挟んで把持できるようにする。
【解決手段】対象物1を挟んで把持する1対の把持爪3a、3bと、1対の把持爪を動作可能に支持して空間内を移動する支持移動体7とを備える。1対の把持爪は、支持移動体に対して往復動方向に駆動されることで、互いに近接して対象物を挟み、または、互いに離間して該対象物を解放するようになっている。往復動方向は、1対の把持爪3a、3bが対象物1を挟む方向に対して斜めの方向である。
(もっと読む)
ロボットハンド
【課題】所望位置で把持対象物を把持可能なロボットハンドを提供する。
【解決手段】把持対象物であるティッシュボックスQや紙コップTを把持する指部81を備えた把持部99は、以下のように構成されている。即ち、指部81のリンク84の把持面84aの所望位置に、把持面84aから突出する突起部84eを設けた。突起部84eは、指部81のリンク84の把持面84aの略中央に形成されている。突起部84eは、シリコンゴムなどの弾性体によって形成されている。突起部84eは、シリコンゴム、ウレタンゴム、又は、クロロプレンゴムによって形成されている。把持面84aには、荷重位置を検出可能な接触抵抗式面センサ84bが設けられている。
(もっと読む)
ロボットハンド
【課題】把持部の形状が異なる複数種類のワークを別々に把持する場合に、作動を中断することなくかつ部品を交換することなく、ワークの把持部を把持することができ、かつ把持部の形状が大きくことなっても対応でき、使用していない部分がワーク等に干渉するおそれが少ないロボットハンドを提供する。
【解決手段】把持部5aの形状が異なる複数種類のワーク5を別々に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。1対の爪12の少なくとも一方は、長手方向の異なる位置に、複数種類のワークA、B、Cの把持部に、それぞれ対応した形状の複数の凹溝12a、12b、12cを有する。
(もっと読む)
ロボットハンド
【課題】ワークの円筒形部分をその径方向に把持することができ、かつ円筒形部分に作用する把持時の面圧を低く抑えることができ、対応できる円筒形部分の直径の種類が限定されないロボットハンドを提供する。
【解決手段】複数のワークが円筒形部分5aを有し、円筒形部分の直径が所定の範囲内で最小値から最大値まで相違するワークの円筒形部分をその径方向に把持するロボットハンド。1対の爪12と、爪の根元に付属し爪の先端から根元までの直線方向を軸方向としてもつ回転軸と、爪を回転軸の軸心回りに回転駆動する回転駆動装置と、1対の回転軸を開位置と閉位置の間で開閉するチャック装置とを備える。1対の爪12は、閉位置において、互いに対向する位置に回転駆動により所定の範囲の直径を超えて連続的に変化する円弧溝13を周方向に有する。
(もっと読む)
開閉チャック
【課題】ワークの把持を正確に検出することが可能な開閉チャックを提供する。
【解決手段】爪によりワークを把持する開閉チャックであって、ガイドレールを有するガイド部材と、ガイドレール上を摺動するよう設置され、爪を取り付け可能な第1及び第2のスライダと、第1及び第2のスライダが互いに離間又は接近するよう、第1及び第2のスライダを摺動させる駆動源と、ガイド部材において、第1及び第2のスライダに取り付けられた爪がワークを把持した際にひずみが生じる位置に取り付けられたひずみセンサと、を備える開閉チャック。
(もっと読む)
組立検査装置及びこれを用いた組立処理装置
【課題】組付受部品に組付部品を組付けるに当たり、組立後の組付部品の組付け状態を容易且つ正確に検査する。
【解決手段】組付受部品1に組み付けられる組付部品2の一部に設けられ、中心位置Cから周囲に向かって濃度パターンPcが順次変化するように形成される単位パターン印13を予め決められた位置関係で四以上有する認識表示体12と、組付受部品1に組み付けられた組付部品2に対向配置されて前記認識表示体12を撮像する撮像具5と、この撮像具5にて撮像された認識表示体12の撮像情報を少なくとも用い、組付受部品1に組み付けられた後の組付部品2の位置及び姿勢に関する配置情報を認識する配置情報認識部6と、この配置情報認識部6にて認識された配置情報に基づいて良好な組付状態の組立であるか否かを検査する組立検査部7と、を備える。これを用いた組立処理装置も対象とする。
(もっと読む)
開閉チャック
【課題】小型の開閉チャックを提供する。
【解決手段】シリンダ室及び収容空間を内部に有しており、外部とシリンダ室とを連通する第1の長孔及び外部と収容空間とを連通する第2の長孔が形成されているハウジングと、シリンダ室内を摺動し、第1のラック部分が形成されたピストンロッドとピストンロッドの両端に設けられた第1及び第2のピストンヘッドとを有する、ピストンと、ピストンと平行に移動可能なよう収容空間に収容され、第1のラック部分と平行に延びる第2のラック部分が形成されているラック部材と、第1及び第2のラック部分と噛み合うピニオンと、第1の長孔を介してピストンに連結されている第1のスライダと、第2の長孔を介してラック部材に連結されている第2のスライダと、を備え、第1のピストンヘッドとシリンダ室の一方の端部との間に第1の密閉空間が画定され、第2のピストンヘッドとシリンダ室の他方の端部との間に第2の密閉空間が画定されている、開閉チャック。
(もっと読む)
カメラ脱着ロボット装置
【課題】ワークが容器の隅に存在する場合であっても、容器の壁と干渉することなくワークを取出すことができるロボット装置を提供する。
【解決手段】ワーク16を認識して把持するロボット装置11。ワーク16を認識する画像認識装置21と、ワーク16を把持するロボットハンド15を有する動作機構19と、ロボットハンド15がワーク16を把持するように動作機構19を制御する制御装置20を備える。画像認識装置21は動作機構19に対して着脱可能となっている。
(もっと読む)
電動ハンド
【課題】大型化を避けつつ、一対の把持部材の閉じ方向および開き方向のいずれの移動でも把持対象物が把持され、且つ、停電時にも把持力を失うことがなく、把持の柔軟性と把持力の正確な検出とを両立する電動ハンドを提供する。
【解決手段】回転軸2に沿って移動する直動部材3と把持部材に連結される連結部材28との間に弾性部材50を備えている。弾性部材50は、直動部材3と連結部材28とが接近するとき圧縮され、直動部材3と連結部材28とが離間するとき伸長する。直動部材3,と連結部材28との間に弾性部材50を設けることにより、把持部材から把持対象物へ加わる力の一部は弾性部材50の変形によって吸収される。したがって、把持対象物が破損しやすい場合でも、把持対象物を柔軟に把持することができる。
(もっと読む)
ロボットハンドとその爪部材交換方法
【課題】 形状又は寸法の異なるワークを把持することができ、交換用の部品の収容スペースを小さくでき、かつその交換のためアクチュエータが不要であるロボットハンドとその爪部材交換方法を提供する。
【解決手段】 ワークを把持するロボットハンド10。複数の末端爪部材12と、末端爪部材同士の間隔を開位置と閉位置の間で開閉するチャック装置14と、末端爪部材に着脱可能に片持ち支持された複数の先端爪部材16とを備える。先端爪部材16は、ワークに接触してこれを把持する把持面を有する。
(もっと読む)
ロボットハンド
【課題】 直径の異なる円筒形部分を有するワークの前記円筒形部分をその径方向に把持する場合に、円筒形部分の直径が大きく異なっても、作動を中断することなくかつ部品を交換することなく、ワークの把持部を安定して把持することができるロボットハンドを提供する。
【解決手段】 直径の異なる円筒形部分5aを有するワーク1の円筒形部分をその径方向に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。爪12は、チャック装置により開閉される開閉部材12aと、開閉部材に爪の長手方向に伸縮可能に取り付けられた先端部材12bと、先端部材を爪の長手方向に伸縮させるアクチュエータ12cとを有しており、開閉部材12aと先端部材12bは、ワーク1の円筒形部分5aに接触してこれを把持する互いに交差する把持面13a,13bをそれぞれ有する。
(もっと読む)
形状自在なロボットハンド爪
【課題】ワークの形状によらずに確実にワークを把持することを可能とするロボットハンドを提供すること。
【解決手段】ワーク16を把持するロボットハンド15であって、複数の爪21と、爪21の対向する内側に取り付けられた複数の形状自在パット22と、爪21の間隔を開方向と閉方向の間で開閉するチャック装置23と、を備える形状自在パット22は、ワーク16を把持する把持力によりワーク16の表面形状にならうようになっている。
(もっと読む)
把持装置の制御装置及び把持装置の制御方法
【課題】高い把持力を維持しつつ、電動モータの消費エネルギーを低減し、高耐久化を実現させる。
【解決手段】CPUは、把持対象物を把持するのに必要な所定把持力Faを一対のフィンガーに発生させる第1の電流指令値I1*を電源部に出力する。電源部は、第1の電流指令値I1*に対応する第1の電流値I1の電流を電動モータに供給する。また、CPUは、電流指令を歯車減速機のヒステリシス特性に基づき、所定把持力Faが維持される第2の電流指令値I2*に減少させる。電源部は、第2の電流指令値I2*に対応する第2の電流値I2の電流を電動モータに供給する。
(もっと読む)
81 - 100 / 446
[ Back to top ]