
Fターム[3C007ES03]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 指部材を有するもの (1,203) | 2つ (446)
Fターム[3C007ES03]に分類される特許
41 - 60 / 446
把持装置及びロボット装置
【課題】一対のフィンガーの把持動作に用いられる回転駆動源を、一対のフィンガーの回転駆動に兼用する。
【解決手段】モータ5は、フレーム6から回転軸5bが突出するようにフレーム6に収容されている。回転軸5bには、ピニオン7が固定されている。また、フレーム6に対してグリッパ基台12が回転可能に設けられている。一対のラック10,10が、グリッパ基台12に支持されて、ピニオン7を間に挟んでピニオン7に噛み合っている。一対のラック10,10には、フィンガー4,4が固定されている。フレーム6には、グリッパ基台12の回転を規制するロック機構14が設けられている。ロック機構14は、一対のラック10,10の移動が規制されると、グリッパ基台12への係止が解除され、グリッパ基台12の回転が許容される。
(もっと読む)
荷搬送ロボット

【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
把持装置
【課題】当接部の挟圧方向に対する厚みをより大きくして、従来に比して把持力を高めた把持装置を提供する。
【解決手段】複数の爪部4・5と、弾性素材からなる袋状部材6aと、該袋状部材6aに充填される粒状物6bとを備え、各爪部4・5のワーク50と当接する部位に付設される複数の当接部6・6・・・と、を有し、各爪部4・5を変位させることにより、各当接部6・6・・・によりワーク50を挟圧し、ワーク50を挟圧した状態で、袋状部材6aの内容積に対する粒状物6bの体積比率を増大させることにより、粒状物6bを、任意の形状を保持しつつ硬化させて、ワーク50の把持を行う把持部2を備える把持装置1であって、把持部2は、当接部6を構成する袋状部材6aのワーク50と当接する部位である正面部6cに連続し、かつ、該正面部6cに略直交して形成される部位である側面部6dの位置を規制するための規制部材9(保持枠9a)を備える。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
ロボット
【課題】対象物を逃がさず且つ確実に決められた位置で把持することが可能なロボットを提供する。
【解決手段】一対の指部12を開閉させて対象物を把持する把持部10Aと、対象物と把持部10Aとを相対移動させる移動装置と、移動装置を制御して把持部10Aを対象物に向けて相対移動させ、対象物の周辺に一対の指部12を配置させた後、把持部10Aを制御して一対の指部12を対象物が載置された載置面と平行な面で開閉させ、対象物の側方から一対の指部12の間に対象物を挟み込ませ、3点以上の接触点で把持部10Aに対象物を把持させる制御装置と、を備えている。
(もっと読む)
ハンド及びロボット
【課題】部品を把持するための腕(アーム)の姿勢変化を小さくすることが可能なハンド及びロボットを提供する。
【解決手段】ハンド35aは、1対の支持部42と、1対の支持部42の内側にそれぞれ支持され、部品を把持する1対の把持爪36と、1対の支持部42を各支持部42の長手方向と交差する揺動軸AXpに沿って開閉させる開閉機構400と、1対の把持爪36を揺動軸AXp回りに揺動させ、把持爪36の先端の向きを変更させる揺動機構500とを備える。
(もっと読む)
基板搬送装置および基板搬送システム
【課題】基板カセットと基板受け渡し先との間でガラス基板の受け渡しを効率良く行うことのできる廉価でコンパクトな構成の基板搬送装置を提案すること。
【解決手段】基板搬送装置2は、ガラス基板7の縁端をクランプしエアー浮上させた状態で、基板カセットからガラス基板7を引き抜くので、狭い間隔で高密度に収納されているガラス基板を引き抜くことができ、エアー浮上状態でガラス基板7を移動させるので、ガラス基板に損傷、異物付着が生じない。基板載置面に引き込まれたガラス基板を基板支持アームで支持し、この状態で基板搬送装置2が収納先の基板カセットまで移動し、基板支持アームによってガラス基板を引き渡し先に渡す。一台で基板カセットからのガラス基板の引き抜き、移送、基板受け渡し先への引き渡しを行うことができ、設置スペースが少なくて済む廉価でコンパクトな基板搬送システムを構築できる。
(もっと読む)
ハンド、ロボット及びロボットシステム
【課題】把持したボルトをシームレスにタップ穴に挿入することが可能なハンド、ロボット及びロボットシステムを提供する。
【解決手段】ハンド20は、第1のフレーム25aに設けられ、ボルトBを把持する1対の把持爪21a、21bを揺動軸AXp回りに揺動させる揺動機構29と、第1のフレーム25aに設けられ、各把持爪21a、21bを内側に支持する1対の支持部22a、22bを揺動軸AXpに沿って開閉させる開閉機構28と、把持爪21a、21bが把持したボルトBの軸回りに、第1のフレーム25aを第2のフレーム25bに対して無限回転させるボルト回転機構30と、動作する機構を1)揺動機構28及び開閉機構29又は2)ボルト回転機構30に切り替える切り替え機構32とを備える。
(もっと読む)
把持ハンド、及び搬送装置
【課題】粘着性を有する物質の付着が低減された把持ハンド、及びその把持ハンドを用いた搬送装置を提供することを目的とする。
【解決手段】被把持部材を挟んで把持するハンド部において、ハンド部の少なくとも被把持部材に接触する部分が、基材21と、多孔質層22と、非粘着層23とで構成される。基材21は、粗面処理され、表面に凹凸形状が形成されている。多孔質層22は、基材21の粗面側に形成された複数の微細孔を有する。非粘着層23は、多孔質層22の表面に形成されている。
(もっと読む)
チャック装置
【課題】制御部においてワークの把持が誤って認識されることを簡単な構成にて防止する。
【解決手段】チャック装置5は、爪部62を、待機位置から把持位置へと向かう方向へ連続的に移動することによりワークを把持する把持部50を備え、把持部50には把持検出部51および判定回路52が取り付けられる。把持検出部51では、爪部62の待機位置からの移動において、爪部62が把持位置に到達した時にON信号が出力され、万一、把持位置を超えた場合にON信号の出力が停止される。判定回路52では、把持検出部51からのON信号の入力が所定時間継続した場合にのみ、ワークの把持を示す把持信号が外部の制御部12に向けて出力される。これにより、ワークが把持されていないにもかかわらず、爪部62が把持位置を通過する際に発生するON信号に起因して、制御部12においてワークの把持が誤って認識されることを、簡単な構成にて防止することができる。
(もっと読む)
ロボットハンド
【課題】把持部の把持面を把持対象物の形状に良好に倣わせることができるロボットハンドを提供する。
【解決手段】本発明の実施の形態に係るロボットハンド100は、基部110と、把持対象物を把持する把持部120(第1把持部121、第2把持部122)と、把持対象物を把持したとき、把持部121、122の把持面1212a、1222aが把持対象物の形状に倣うように、把持部121、122における基部110からの延在方向軸回りへの回転と、把持部121、122の開閉方向への回転と、を許容するなじみ部130と、を備える。
(もっと読む)
ロボット用ハンドユニットおよびロボット
【課題】指部の複数の姿勢において、関節駆動部に対する負荷を軽減することが可能なロボット用ハンドユニットを提供する。
【解決手段】このハンドユニット1(ロボット用ハンドユニット)は、根元リンク部124および中間リンク部125と、中間リンク部125を根元リンク部124に対して相対的に回動させる関節駆動部122と、中間リンク部125の根元リンク部124に対する複数の回動位置において、作業対象を把持する際に根元リンク部124に対して係合することによって中間リンク部125が根元リンク部124に対して相対的に回動するのを規制するストッパ部16とを含む人差し指部12を備える。
(もっと読む)
ハンド及びロボット
【課題】把持したボルトをタップ穴に挿入することが可能なハンド及びロボットを提供する。
【解決手段】ハンド20は、1対の支持部22a、22bと、1対の支持部22a、22bの内側にそれぞれ支持され、ボルトBを把持する第1及び第2の把持爪21a、21bと、第1及び第2の把持爪21a、21bを各支持部22a、22bの長手方向と交差する揺動軸回りに揺動させ、第1及び第2把持爪21a、21bの先端の向きを変更させる揺動機構29と、第1及び第2の把持爪21a、21bが把持したボルトBをボルトBの軸回りに回転させるボルト回転機構30とを備える。
(もっと読む)
ロボット
【課題】対象物を逃がさず且つ確実に決められた位置で把持することが可能なロボットを提供する。
【解決手段】一対の指部12と一対の指部12が接続された本体部11とを有し、一対の指部12の一端部14が本体部11と離間する位置に設けられた第1回転軸13の周りに回転可能に接続され、一対の指部12の他端側が第1回転軸13を中心として対象物が載置された載置面と平行な面で揺動することにより一対の指部12を開閉させて対象物を把持する把持部10Aと、対象物と把持部10Aとを相対移動させる移動装置と、移動装置を制御して把持部10Aを対象物に向けて相対移動させ、対象物の周辺に一対の指部12を配置させた後、把持部10Aを制御して一対の指部12を載置面と平行な面で開閉させ、対象物の側方から一対の指部12の間に対象物を挟み込ませ、3点以上の接触点で把持部10Aに対象物を把持させる制御装置と、を備えている。
(もっと読む)
ハンド及びロボット
【課題】部品を把持するための腕(アーム)の姿勢変化を小さくすることが可能なハンド及びロボットを提供する。
【解決手段】ハンド35aは、1対の支持部42と、1対の支持部42の内側にそれぞれ支持され、部品を把持する1対の把持爪36と、1対の支持部42を各支持部42の長手方向と交差する揺動軸AXpに沿って開閉させる開閉機構400と、1対の把持爪36を揺動軸AXp回りに揺動させ、把持爪36の先端の向きを変更させる揺動機構500とを備える。
(もっと読む)
医療用マニピュレータ
【課題】対象物をより安定して把持することができる医療用マニピュレータを提供する。
【解決手段】対象物を把持する医療用マニピュレータ1は、先端側に設けられ、開閉する第1鉗子片11及び第2鉗子片12と、第1鉗子片及び第2鉗子片の基端側に接続され、軸線方向に進退させることにより第1鉗子片及び第2鉗子片を開閉させる操作部材20とを備え、第1鉗子片及び第2鉗子片のそれぞれに設けられ、閉じる際に互いに接近して対象物と接触する把持面11A、12Aは、ヤング率が120ギガパスカル以下の金属材料で形成されていることを特徴とする。
(もっと読む)
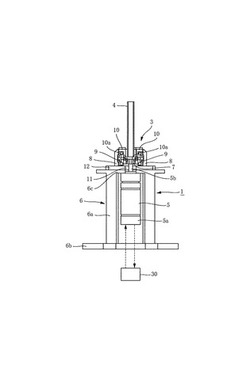
ワーク搬出入装置及び乾燥処理装置
【課題】ワークの搬出入を容易に行うことのできるワーク搬出入装置及び乾燥処理装置を提供する。
【解決手段】操作部4と、荷重バランサー装置5と、を有し、操作部4は、エアレギュレータが搭載された箱体状の操作本体6と、操作本体6の前面側に設けられた長尺な棒状のアーム部材7と、固定機構8と、一対の把持部材10とを有している。アーム部材7は、ワーク3の内周面に挿入されることで、ワーク3を保持可能であって、その保持されたワーク3を軸方向に沿ってスライド可能に構成されている。
(もっと読む)
ワーク搬送装置
【課題】設置に広いスペースを必要としないコンパクトな装置であるとともに、効率的なワークの搬入搬出動作ができるワーク搬送装置を提供すること。
【解決手段】支持フレーム2と、第1軸J1まわりに回動自在に支持される第1アーム3と、第1軸J1上に配置され支持フレーム2に対して相対的に姿勢を保持可能な基準姿勢保持部材と、第1アーム3に対して第1軸J1と平行な第2軸J2まわりに回動自在に支持される第2アーム5と、第1軸J1と平行であって第2軸からの距離が略等距離である第3軸J3及び第4軸J4上にそれぞれ配置され、第2アーム5に対して第3軸J3及び第4軸J4まわりにそれぞれ回動自在に支持される第1及び第2ハンド51、52と、を備え、第1アーム3又は第2アーム5が回動した場合であっても、支持フレーム2に対する第1及び第2ハンド51、52の姿勢が保持されることを特徴とするワーク搬送装置。
(もっと読む)
ロボットアームの制御方法及びプログラム
【課題】作業性の高いロボットアームの制御方法を提供する。
【解決手段】ロボットアームの制御方法は、外表部が柔軟部材600で覆われたロボットハンド(ハンド部120)を備えるロボットアームの制御方法であって、被挟持部材が置かれる載置面に柔軟部材600を押し付け、推定した柔軟部材600のつぶれ量を予め設定されたつぶれ量より大きくする工程と、ロボットハンドで被挟持部材を挟持する工程と、を備える。柔軟部材600を所定のつぶれ量で押し潰して被挟持部材を挟持するので、被挟持部材を確実に挟持でき、作業性を向上させることができる。
(もっと読む)
バラ積みピッキング装置および方法
【課題】メッシュボックス等の容器にバラ積みされた複数のワークから、人による重量物のハンドリング作業なしにワークを1つずつピッキングすることができ、かつ容器内のワーク全体を高い位置精度で計測することができ、距離センサと容器及びワークとの干渉を無くすことができ、これによりピッキング時間を短縮し、ピッキングの成功率と装置の稼働率を高めることができるバラ積みピッキング装置および方法を提供する。
【解決手段】ハンド14によりハンドに距離センサ16を取り付け(S1)、ハンドを移動して、距離センサ16によりバラ積みされたワーク全体の3次元形状データをハンド14で計測し(S2)、かつ計測した3次元形状データからハンド14で把持可能なワーク1の位置と姿勢を認識し(S4)、ハンド14によりハンドから距離センサ16を取り外し、ハンド14により把持可能なワーク1を順に把持して搬送先に搬送する(S6)。
(もっと読む)
41 - 60 / 446
[ Back to top ]