
Fターム[3C007ES03]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 指部材を有するもの (1,203) | 2つ (446)
Fターム[3C007ES03]に分類される特許
101 - 120 / 446
把持装置の制御装置及び把持装置の制御方法
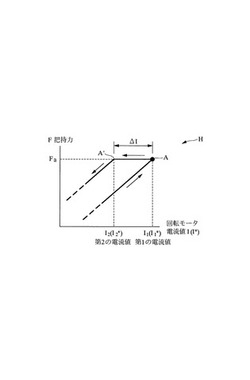
【課題】高い把持力を維持しつつ、電動モータの消費エネルギーを低減し、高耐久化を実現させる。
【解決手段】CPUは、把持対象物を把持するのに必要な所定把持力Faを一対のフィンガーに発生させる第1の電流指令値I1*を電源部に出力する。電源部は、第1の電流指令値I1*に対応する第1の電流値I1の電流を電動モータに供給する。また、CPUは、電流指令を歯車減速機のヒステリシス特性に基づき、所定把持力Faが維持される第2の電流指令値I2*に減少させる。電源部は、第2の電流指令値I2*に対応する第2の電流値I2の電流を電動モータに供給する。
(もっと読む)
把持装置

【課題】把持装置の駆動装置を大型化することなく、寸法が異なる複数種類の対象物を把持できるとともに、把持する対象物の種類を変更する場合の対応時間を短縮ことができる把持装置を提供する。
【解決手段】寸法が異なる複数種類の対象物1、2を把持して移動させる把持装置10。対象物1、2を把持するように駆動される把持部3と、把持部3が動作可能に把持部を保持する保持体5と、把持部3に装着可能なアタッチメント7と、を備える。把持部3は、アタッチメント7が装着されていない時には、第1種類の対象物1を把持可能であり、アタッチメント7が装着されている時には、アタッチメント7を介して第2種類の対象物2を把持可能である。
(もっと読む)
搬送装置及びその位置決め方法
【課題】センサフィードバックなしに、搬送装置の位置決め精度を高める技術を提供する。
【解決手段】搬送装置100は、自走台車10、自走台車に取り付けられたロボットアーム12、係合器14、及び、コントローラ18を備える。係合器14は、ロボットアーム12の先端に取り付けられている。また、係合器14は、ワークラック90の基準ブロック92と係合するように構成されている。係合器14は、係合すると基準ブロック92との相対位置が正確に定まるように構成されている。コントローラ18は、まず、係合器14が基準ブロック92に届く範囲に自走台車10を移動させる。次いで、自走台車10の車輪を受動回転自在状態としながら、係合器14を基準ブロック92に係合させるように係合器14を制御する。係合器14と基準ブロック92の間に作用する反力によって自走台車10の位置が修正される。
(もっと読む)
ロボットハンド
【課題】ワークに対して、左右1対の平面により把持する場合であっても、把持状態を安定させることを可能とするロボットハンドを提供する。
【解決手段】ワーク12を把持するロボットハンド11であって、一対の爪13、14と、一対の爪13、14の間隔を開位置と閉位置の間で開閉するチャック装置16を備える。爪の一方である爪13は、その中間位置に、閉位置において、ワーク12の表面に接触する単一の凸部分13aを有し、爪の他方である爪14は、開位置と閉位置を結ぶ開閉方向に直交する方向の2箇所に、閉位置において、ワーク12の表面に接触する一対の凸部分14aを有する、ことを特徴とするロボットハンド。
(もっと読む)
圧縮ばねハンドリング装置
【課題】
サイズが異なる複数の圧縮ばねを取り扱う事が可能な圧縮ばねハンドリング装置を提供すること。
【解決手段】
本発明に係る圧縮ばねハンドリング装置は、圧縮ばねを圧縮方向に挟持する開閉自在な対となった挟持爪を有する挟持爪ユニットと、前記挟持爪それぞれに対応して設けられ、前記挟持爪と一緒に移動すると共に圧縮ばねを挟持した状態において挟持爪と当接している圧縮ばねの端部を押し、挟持された圧縮ばねを前記挟持爪ユニットから押し出すプッシャーと、各前記プッシャーを押出方向に同期駆動する押出駆動部と、から構成されている。
(もっと読む)
ロボットハンド
【課題】駆動源が非常停止したときにワークを落下させることなくワークを保持できるロボットハンドを提供する。
【解決手段】一対の落下防止機構40L・40Rを具備し、一対の落下防止機構40L・40Rは、ワーク100を把持するときにワーク100に接触する把持カム41と、把持カム41を回動可能に支持する回転支点ピン42と、を備え、各把持カム41・41は、ワーク100を把持するときに、一対の駆動フィンガー30L・30Rをワーク100に近接させることにより、ワーク100に押圧され、各把持カム41・41には、ワーク100を把持している状態で、ワーク100の自重によりワーク100へ近接する方向B1・B2への回動力が加えられ、把持カム41にワーク100へ近接する方向B1・B2への回動力が加えられることにより、把持カム41によるワーク100に対する押圧力が増加する。
(もっと読む)
マーキング装置およびマーキング方法
【課題】マーキング装置およびマーキング方法において、識別マークを形成できる領域が狭いワークの場合であってもワークに効率よく識別マークを形成することができるようにする。
【解決手段】把持可能領域Hを有するワークWに識別マークMを形成するマーキング装置1であって、把持可能領域HにおいてワークWを把持する把持アーム部6と、把持アーム部6に設けられ、ワークWを把持するとともに、把持した位置に識別マークMの少なくとも一部を形成するマーキング把持部6bと、を備えるものを用いる。
(もっと読む)
触覚センサおよびそれを備えたロボット
【課題】検知部の破損および弾性部材の剥離を防止可能な触覚センサを提供する。
【解決手段】触覚センサ10は、基板1と、酸化膜2と、検知部3(31,32)と、弾性部材4と、金属プレート5とを備える。酸化膜2は、基板1上に形成される。検知部3(31,32)は、酸化膜2上に配置される。弾性部材4は、金属プレート5から突出した突出部41,42を有する。弾性部材4は、突出部41,42がそれぞれ検知部31,32を覆うように基板1および酸化膜2上に配置される。金属プレート5は、弾性部材4の突出部41,42と所望の間隔を隔てて突出部41,42の周囲および弾性部材4上に配置される。
(もっと読む)
ハンドリング装置およびハンドリング方法
【課題】
あるワークと挟持方向に弾性を有する他のワーク とを同時に挟持可能である軽量なハンドリング装置およびハンドリング方法を提供する。
【解決手段】
第1ワークと挟持方向に弾性を有する第2ワークとを挟持するハンドリング装置であって、連動された第1可動爪と第2可動爪と、対向配置された固定爪とを備え、第1可動爪と固定爪との間隔、および第2可動爪と固定爪との間隔とが、所定の条件を具備し、第1可動爪と固定爪とで第1ワークを挟持し、第2可動爪と固定爪とで第2ワークを挟持する。
(もっと読む)
応力検出素子、触覚センサー、および把持装置
【課題】小型化が可能で、かつ剪断力および押圧力を正確に検出可能な応力検出素子、触覚センサー、および把持装置を提供する。
【解決手段】応力検出素子200は、矩形状の開口部111を有するセンサー基板11と、センサー基板11上に形成されて開口部111を閉塞する可撓性を有する支持膜14と、センサー平面視において、開口部111の一辺に沿い、開口部111の内側および外側に跨って設けられ、湾曲することで電気信号を出力する剪断力検出用圧電体210と、センサー平面視において、開口部111の内側で、剪断力検出用圧電体210から離れた位置に設けられ、湾曲することで電気信号を出力する押圧力検出用圧電体310と、支持膜14を覆う弾性膜15と、を具備した。
(もっと読む)
ワークの自動積載方法及びその装置
【課題】サイクルタイムを短縮することができるワークの自動積載方法及びその装置を提供する。
【解決手段】先ず、初期位置からロボットヘッド20を第1プレートW1の上方に移動し、ロボットヘッド20に設けられた第1把持部42、42にて第1プレートW1を把持する。そして、ロボットヘッド20を第2プレートW2の上方に移動し、ロボットヘッド20に設けられた第2把持部54、54にて第2プレートW2を把持する。その後、第1プレートW1及び第2プレートW2を把持した状態でロボットヘッド20をトレー104に形成された凹部106の上方に移動し、第1プレートW1及び第2プレートW2の把持を解放することにより、第1プレートW1及び第2プレートW2を積載する。
(もっと読む)
移載装置
【課題】小型で高速動作が可能な移載装置を安価に提供する。
【解決手段】側面に第1と第2の円筒溝カム(11,12)、底面51に溝カム52が形成されたシリンダー4と、ピニオンギア23環装され、第1円筒溝カムにより上下するシャフト部21と、第2円筒溝カムによってシャフト部内で上下するロッド部22と、ピニオンギアに歯合して溝カムにより前後するラックギア54と、物体W1の把持と開放を相補的に行う二つ一組のチャック部31を備えたチャックユニット6aを備え、ピニオンギアはシャフト部を介してチャックユニットを旋回させ、ロッド部はシャフト部と同期して上下するとともに、シャフト部の下死点停留期間Δt2中にさらに下方の第2下死点Dd2に至り、二つ一組のチャック部はロッド部が第2下死点に至ったときに、それぞれの把持状態と開放状態を切り替え、上死点と第1の下死点までの区間ではその状態を維持する。
(もっと読む)
アーム駆動機構、及びこれを備えたマニピュレータ
【課題】先端部に作業ツールが装着されるアーム機構を大型化させることなくアーム機構を姿勢変更させることのできるアーム駆動機構及びこれを備えたマニピュレータを提供する。
【解決手段】アーム駆動機構は、一対の回転体と、両回転体に掛け渡される無端環状体と、駆動モータにより回転されるスクリューシャフトと、スクリューシャフトに螺合され、無端環状体の一部が固着されたスライダとを備え、他方の回転体が一方の回転体よりも小径に設定され、無端環状体の回転体間にある二つの対向部のうちの一方の外周側が巻き掛けられて他方の回転体側にある対向部を平行にするアイドラを備え、スクリューシャフトが一方の対向部の外周側と対向するように配置されている。
(もっと読む)
グリッパ装置およびそのストローク量変更方法
【課題】ツールチェンジャーや爪開閉以外のアクチュエータが不要で、グリッパの大きさが小型であり、把持位置の微調整が可能なハンド装置を提供する。
【解決手段】ワークを把持するチャック爪部と、前記チャック爪部を含み、前記チャック爪部の開閉方向と同方向に移動するスライダ部と、アクチュエータを備え、前記アクチュエータによって前記スライダ部と同方向に開閉動作するグリッパ本体と、前記スライダ部と前記グリッパ本体とを引っ張るように付勢するバネと、前記スライダ部に形成され前記グリッパ本体の突起形状の爪部分が嵌合する複数個の穴と、を備え、前記バネが伸びた状態にあるとき前記グリッパ本体を開閉させ、前記グリッパ本体の前記爪部分と前記穴との嵌合位置を変更するようにした。
(もっと読む)
ロボットハンド
【課題】把持体を回転させるための駆動源を定位置に設置することができ、被把持物配置予定位置周りで把持体を無制限に回転させることのできるロボットハンドを提供する。
【解決手段】把持体61を移動させる第一駆動部62と、把持体を回転させる第二駆動部63とを備え、第一駆動部は、スライドシャフト64と、駆動源の出力でスライドシャフトを軸線方向に往復動させるスライド手段65と、先端部に把持体が連結された回転レバー66と、回転レバーを回転可能に支持し、所定位置に位置した状態でスライドシャフトの一端部周りで回転自在に設けられた支持体67とを備え、第二駆動部は、駆動源の出力を支持体に伝達し、支持体をスライドシャフト周りで回転させる伝達機構とを備え、スライドシャフトは、支持体に支持された回転レバーの基端部を収容する無端円環状の溝が形成されている。
(もっと読む)
液滴吐出装置
【課題】生産効率を向上させる液滴吐出装置を提供する。
【解決手段】ワーク5に液滴を吐出する前にワーク5に前処理を施す前処理部20と、液滴を水平方向に吐出可能に取り付けられた液滴吐出ヘッドを備え、液滴吐出ヘッドから液滴を吐出して液滴をワーク5に塗布する液滴吐出部30と、液滴が吐出されたワーク5に後処理を施す後処理部50と、ワーク5を鉛直方向に吊り下げて把持可能なチャック部78を有する搬送部70と、を有し、前処理部20と、液滴吐出部30と、後処理部50とが搬送部70のチャック部78の移動範囲6内において順に配置され、搬送部70のチャック部78がワーク5を把持した状態で前処理部20と、液滴吐出部30と、後処理部50とを順次移動可能に構成する。
(もっと読む)
トレイ移載装置及び方法
【課題】簡単な構造で、トレイの有無やトレイ高さを検出することができるトレイ移載装置及び方法を提供する。
【解決手段】複数の積載スペースa,b,cにそれぞれ段積み可能な複数のトレイ10と、トレイに設けられたトレイ把持部11とトレイ上に積載されたワーク1を把持可能なハンド12と、ハンドに取り付けられトレイをその上方から撮影するカメラ14と、ハンドを3次元的に移動可能なロボット16と、カメラで撮影した画像を画像処理してロボットを制御するロボット制御装置20とを備える。各積載スペースの上方から撮影した画像5に基づき、最上段のトレイ把持部11の位置及び姿勢と、各積載スペースのトレイ10の段積み数とを計測し、これに基づき最上段のトレイ10の移載及び最上段のトレイ上のワーク1の移載を行う。
(もっと読む)
マイクロピンセット、その製造方法及びその操作方法
【課題】マイクロピンセット、その製造方法及びその操作方法に関し、操作性及び簡易性を向上する。
【解決手段】アーム支持部2と前記アーム支持部に設けられ先端部を把持部9とする一対のアーム部3とからなるフレーム1と、前記一対のアームに設けられたAs−S、As−Se或いはAs−S−Seのいずれかのカルコゲナイドガラス薄膜10,11からなる駆動素子と、前記カルコゲナイドガラス薄膜に偏光保持型光ファイバ12,13を経由してレーザ光を照射するレーザ光照射手段とを備える。
(もっと読む)
試料加工装置
【課題】本発明の課題は、微小試料片およびまたはその周辺領域を汚染することなく、確実で安定的な微小試料片の分離、摘出、格納を行う装置および方法を提供することにある。
【解決手段】試料基板から観察すべき領域を含む試料片をイオンビームスパッタ法により分離し、試料を押し込んで保持し、引き抜いて分離するための、根元に比較して先端が細く、該先端部が割れている形状で、該形状により得られる試料片を保持する部位の弾性変形による力で試料片を保持する棒状部材からなるはり部材を用いて、前記試料片を試料基板から摘出し、試料片を載置するための載置台上へ移動させた後、前記はり部材と前記試料片を分離することで該試料片の格納を行う。
(もっと読む)
ハンド装置
【課題】大きさの異なる複数の所定ワークを把持する際に、ワークの大きさに合わせて把持状態検出センサの位置調整を行う必要がなく、フィンガの開閉時間及び把持力の変動を小さくすることができ、コストの増大及び生産性の低下を抑制することができるハンド装置を提供する点にある。
【解決手段】ワークを把持する把持手段2のオン−オフ式の開閉動作を行ってワークの脱着を行うハンド装置1であって、把持手段2が複数のフィンガ3,3を同期させて開閉するものであり、フィンガ3,3に、被把持部の大きさが異なる複数のワーク又は複数の被把持部の大きさが異なる単一のワークを把持する、複数の把持部C1,C2を設け、把持部C1,C2を、対応する前記被把持部を把持した際におけるフィンガ3,3の開き位置が同じになるように、前記被把持部の所定の大きさに合わせて形成した。
(もっと読む)
101 - 120 / 446
[ Back to top ]