
Fターム[3C007ES03]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 指部材を有するもの (1,203) | 2つ (446)
Fターム[3C007ES03]に分類される特許
21 - 40 / 446
敷ブロックの配置方法、敷ブロック移動用工具、および、その工具を備えた工作機械
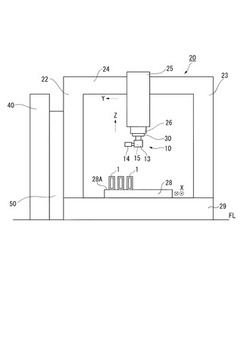
【課題】作業者の安全性確保、機械および敷ブロックの破損防止および設置精度の向上に加え、敷ブロックの姿勢変更も容易に行うことができる敷ブロックの配置方法。
【解決手段】敷ブロック1をスピンドル30が保持可能な範囲内のブロック格納エリア28Aに設置しておくブロック準備工程と、スピンドルに装着される主軸装着部、敷ブロックを保持するブロック保持部14およびブロック保持部を水平な旋回軸を中心に旋回させる旋回機構15を有する敷ブロック移動用工具10をスピンドルに装着する工具装着工程と、相対移動により、敷ブロック移動用工具によって敷ブロックをテーブル28のワーク載置位置に配置するブロック配置工程とを備え、ブロック配置工程は、敷ブロックを保持した状態で、敷ブロックの姿勢を変更する動作を含む。
(もっと読む)
触覚センサ、把持装置、及びアクチュエータシステム

【課題】構造が簡素な触覚センサ等を提供する。
【解決手段】触覚センサ70は、第1電極73aと第3電極73cとの間の第1静電容量と、第2電極73bと第3電極73cとの間の第2静電容量と、に基づいて、受圧部72に加わった押付力(X軸方向の力)又は押付力によって生じる把持力(Y軸方向の力)を検出する。これにより、3つの電極のみで、押付力、把持力等の力を検出することが可能になる。そのため、構造が簡素な触覚センサ70、この触覚センサ70を備えた把持装置及びアクチュエータシステムを提供することができる。
(もっと読む)
ロボットハンドの挟み込み軽減機構及びロボットハンド
【課題】高い安全性と大きな指先力を確保できるロボットハンドの挟み込み軽減機構を提供する。
【解決手段】本発明の一形態に係るロボットハンドの挟み込み軽減機構1は、駆動機構6から伝達される駆動力によって開閉する一対のハンド部2を備えるロボットハンドの挟み込み軽減機構であって、ハンド部2が開方向に回転駆動するときのみ、ハンド部2に所定の大きさの負荷が作用すると、駆動機構6からハンド部2への駆動力の伝達を減少させる過負荷軽減機構7を備える。
(もっと読む)
デパレタイズロボットのロボットハンド
【課題】平面視長方形である複数の移載物を同一平面に並べた積載位置から搬出位置へ前記移載物を移し替えるデパレタイズロボットのロボットハンドを提供する。
【解決手段】移載物3の厚みより長い抱え込み爪22,22を、移載物3の一辺より長い間隔で前後一対配し、各抱え込み爪22の下端部に抱え込みロッド23を架け渡して抱え込み枠21を構成し、互いの抱え込みロッド23を平行にし、鉛直線に対して左右対称に対向させた左右一対の抱え込み枠21,21それぞれを、各抱え込み爪22の上端部に設けた揺動軸226を本体部24に軸着して前記本体部24に支持させ、前記抱え込みロッド23,23が平行を保ったまま各抱え込み枠21を揺動させるエアシリンダ26を本体部24に設けたデパレタイズロボット1のロボットハンド2である。
(もっと読む)
モーター、ロボットハンドおよびロボット
【課題】半導体上のパターン配線と、半導体内に位置検出回路、制御回路を形成することによってブラシレスの簡単な構造の小型コアレスレスモーターを提供する。
【解決手段】対向配置された基体と、前記基体に回転可能に支持された回転軸と、前記回転軸に直交し、前記回転軸に固定され前記基体の対向領域内で回転可能に配置される磁石と、を備える回転子と、前記基体の対向する一方の面、または両方の面に固定され、前記磁石と前記基体との間に配置される半導体装置と、を備え、前記磁石は、前記回転軸中心に対して円周方向にN極とS極と、を交互に配置され、前記半導体装置は、前記回転軸中心を通る放射方向の直線に平行に延伸された1以上の駆動配線と、前記駆動配線の電流を制御する制御回路と、前記磁石の前記半導体装置との相対位置を検出するセンサーを含む検出回路と、を含むモーター。
(もっと読む)
直流モーター、直流モーターを搭載したロボットハンド、およびロボット
【課題】小型で高トルクの直流モーターの提供。
【解決手段】回転軸112の中心から所定角度毎に、N極またはS極の何れかの極性に交互に着磁した円板形状の永久磁石をローター110とし、ローター110の着磁面と向かい合わせて電流経路基板120を設ける。電流経路基板120には、ローター110の回転軸112を中心として所定角度の中心角を有する扇形形状の半径部分に沿って形成した往き側経路と、扇形形状の円弧部分に沿って形成した戻り側経路とを少なくとも一部に含んだ第1の電流経路と、第1の電流経路の往き側経路と戻り側経路とに囲まれた扇形形状の領域内の位置に、渦巻き状に形成した電流経路を少なくとも一部に含む第2の電流経路とを形成する。ローター110からの磁界の下で第1および第2の電流経路に電流を流すと、ローレンツ力および磁力を用いて回転トルクを発生させることができるので、小型で高トルクな直流モーターを構成できる。
(もっと読む)
つかみ装置
【課題】ワークが不意に離脱するのを規制しつつ、長寿命化および作業の迅速化を図ること。
【解決手段】第1チューブ体2および第2チューブ体3と、各チューブ体2、3の両端がそれぞれ全周にわたって固定され、該チューブ体2、3との間に流体が給排される空間Aが形成された固定部材5と、該固定部材5に連結された弾性変位可能な可動部材6と、を備え、第1チューブ体2は、膨張変形したときに可動部材6を押圧して弾性変位させ、第2チューブ体3は、当該つかみ装置1とワークWとを軸線O方向に沿って相対的に接近移動させることでワークWに内挿または外挿され、可動部材6には、第2チューブ体3がワークWに内挿または外挿されるときに、弾性変位した可動部材6が復元変位することでワークWの被係合部W1に係合し、ワークWに対する第2チューブ体3の内挿または外挿が解除されるのを規制する係合部16が設けられているつかみ装置1を提供する。
(もっと読む)
直交型組付装置
【課題】大型化を招くことなく、ワークを移動させることのできる範囲を拡大可能な直交型組付装置を提供する。
【解決手段】レールとレールに沿って移動する移動部材からなるX軸、Y軸、Z軸ローダによって、ワークWを把持するワーク把持部16を移動させる。さらに、ワーク把持部16をワークWに接触して把持するマニュピレータ部16aと、このマニュピレータ部16aをX軸、Y軸、Z軸のうち少なくとも一つの軸方向へ移動させるマニュピレータ稼働部16bによって構成する。これにより、X軸、Y軸、Z軸ローダによってワークWを移動させることのできる範囲に加えて、マニュピレータ稼動部16bによる移動範囲を拡大できる。
(もっと読む)
ワーク取り出し方法
【課題】ワークの状態に関係なく密集した複数のワークの中から任意のワークを簡単に取り出すことができるワーク取り出し方法を提供する。
【解決手段】本発明に係るワーク取り出し方法によれば、検出されたワークWの位置及び姿勢に基づき任意のワークWが第1方向D1に押し動かされる。こうしてワークW上に第1チャック15aで把持可能な第1把持領域A1が確保される。その結果、第1チャック15aはワークWの第1把持領域A1を確実に把持することができる。その後、ワークWの一端が持ち上げられて、第2チャック15bが把持可能な第2把持領域A2が確保される。その結果、第2チャック15bはワークWの第2把持領域A2を確実に把持することができる。こうしてワーク取り出し装置1は、ワークWの状態に関係なく密集した複数のワークWの中から任意のワークWを簡単に取り出すことができる。
(もっと読む)
荷搬送アームおよび荷搬送アームを備えた荷搬送ロボット
【目的】複雑な制御を必要とせず荷物を傷つけずに保持できる荷搬送アームおよび荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体には、左右一対のアームを設け、アームの前腕21には、荷を当接支持する手先部30を軸35に回転可能に設けた。手先部30は、荷に当接する当接面30Aを有し、当接面30Aを前腕21の長手方向に垂直に付勢するねじりコイルバネ36の一端を固定し、ねじりコイルバネ36の他端は前腕21に固定されている。荷搬送ロボットは、荷の表面に当接面30Aを当接させるように前腕21を可動させ、荷の表面の向きに合わせて手先部30を軸35を中心に回転させる。当接面30A全体を荷の表面に当接させた状態で、前腕21を可動させ、手先部30を介して軸35にて荷の荷重を受けて、荷を移動させる。
(もっと読む)
モーター、ロボットハンド及びロボット
【課題】位置センサー及び制御回路を備え、信頼性が高く小型のブラシレスモーターを提供する。
【解決手段】モーターは、円柱状であり、円周方向にS極及びN極を交互に有する回転子と、回転子の円形面に接続された回転軸と、円形面に対向する第1の面を有し、第1の面に円周方向に沿って配列された複数の渦巻状導体パターンを有する半導体素子と、を備え、前記半導体素子は、前記渦巻状導体パターン内に位置するコアと、前記渦巻状導体パターンに流れる電流を制御する制御回路と、前記回転子の磁極の位置を検出する位置センサーと、を含む。
(もっと読む)
コアレスモーター、ロボットハンドおよびロボット
【課題】同一方向の回転であれば電流の流れる方向を切り替える必要が無く、よって簡単な構造でブラシレスとし、且つコアレスレスモーターを提供する。
【解決手段】回転軸と、前記回転軸に固定され、前記回転軸の軸方向にN極とS極とを配置し、前記回転軸の回転中心を中心として円柱状に形成された永久磁石を備える磁石体と、前記磁石体の前記永久磁石の前記N極面、もしくは前記S極面に対向配置される第1の面を有し、前記磁石体の前記回転中心において前記磁石体と相対的に回転可能に配置される半導体装置と、を備え、前記半導体装置は、前記第1の面に前記回転中心から放射状に配置される1以上の導体配線と、前記半導体装置は、少なくとも前記導体配線に流す電流の方向を切り替える回路を含む駆動回路と、前記磁石体と前記半導体装置との相対的な回転位置を検出する検出回路と、を含むコアレスモーター。
(もっと読む)
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制するとともに把持部の種類を容易に変更する。
【解決手段】組立ロボットでは、制御部から固定部31へと出力された把持部制御信号および結合部制御信号が、スリップリング35を介して回転部32へと伝達され、また、把持状態取得部から出力された把持状態信号が、回転部32からスリップリング35を介して固定部31へと伝達されて制御部へと送られる。このため、固定部31と回転部32との間における信号伝達用の配線が外部に露出することを抑制することができ、配線によりロボットハンドやロボットアームの可動範囲が制限されてしまうことを抑制することができる。また、ロボットハンドでは、把持部および把持状態取得部を備えるハンド先端部が、結合部323により回転部32に対して着脱自在に固定されるため、把持部の種類を容易に変更することができる。
(もっと読む)
チャック装置
【課題】チャック装置において爪部の可動範囲の変更を容易に行う。
【解決手段】チャック装置5は、進退部材73を進退させる進退駆動部60、および、複数の爪部820を有する把持機構8を有する。把持機構8は、複数の爪部820に接続される複数の板カム部82、および、複数の爪部820の移動をガイドするガイド部を有する。板カム部82にはカム孔821が形成され、進退部材73に設けられたピン732がカム孔821に係合し、進退部材73の移動により、複数の爪部820のそれぞれが進退部材73の移動方向に垂直な方向に移動する。チャック装置5では、複数の板カム部82が、カム孔の形状が異なる他の複数の板カム部に交換可能である。これにより、チャック装置5において爪部の可動範囲の変更を容易に行うことができる。
(もっと読む)
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制する。
【解決手段】組立ロボットは、ロボットアーム、ロボットハンド2および制御部を備え、ロボットハンド2は、ワークを把持する把持部、および、把持部に駆動用の圧縮エアを供給する電磁弁33を備える。組立ロボットでは、把持部制御信号が制御部からロボットハンド2の無線通信部35へと無線にて送信され、把持部によるワークの把持状態を示す把持状態信号が、無線通信部35から制御部へと無線にて送信される。このため、制御部とロボットハンド2との間において、把持部制御信号および把持状態信号の送受信用の配線が不要となる。このように、ロボットハンド2に接続される配線を削減することにより、配線によりロボットハンド2やロボットアームの可動範囲が制限されてしまうことを抑制(または防止)することができる。
(もっと読む)
搬送ハンド
【課題】中央部分が中空のワークであっても、確実に搬送できるとともに、設備を簡素化できる搬送ハンドを提供すること。
【解決手段】第1把持部11、第2把持部12、第3把持部13及び第4把持部14は、複数のバルブガイドWa又はバルブシートWbを把持して搬送し、略半円形状の外壁101aと略半円形状の内壁101bを有する一対の把持手段101と、一対の把持手段101を相互に近接又は離間させる押圧手段102と、を備え、これら一対の把持手段101は、押圧手段102により近接されることで内壁101bによってバルブガイドWaを把持し又は押圧手段102により離間されることで外壁101aによってバルブシートWbを把持し、複数のバルブガイドWa又はバルブシートWbの配列方向に沿って、複数連接されている。
(もっと読む)
容器搬送装置
【課題】容器搬送装置において、容器に貼付されたラベル等の一部が剥がれてその剥がれ部分がマニピュレータに付着している場合や容器の外側に粘着剤が残留しておりそれによって容器側面がマニピュレータに付着している場合に、マニピュレータを開動作させても容器がマニピュレータから離れないことがあった。
【解決手段】マニピュレータ20Aを下降させて、それを開動作させて容器を離した後、そのままマニピュレータ20Aを再下降させる。これにより付着状態が強制的に解消される。その後、マニピュレータ20Aが上方へ引き上げられる。その途中でマニピュレータ20Aの閉動作が実行され、容器26Aの不存在が確認される。マニピュレータ20Aの開動作の開始後に開動作完了を待たずに再下降を開始させてもよい。
(もっと読む)
寸法測定装置および寸法測定装置を備えた荷搬送ロボット
【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
ワーク搬送方法および装置
【課題】姿勢矯正手段を用いる必要なしに、ワークを常に適正に、かつ十分強固に把持して、所期した通りの姿勢で所定の作業ステーションまで、ワークを常に確実に搬送することができるワーク搬送方法を提供する。
【解決手段】中空もしくは中実の軸部3と、軸部3の中間部に設けられたフランジ部4とを具え、基準面1上に載置されるワーク2の、フランジ部4を基準面1と直交する向きに押圧して、該フランジ部4の周面を基準面1上に線もしくは面接触させて、前記軸部3の中心軸線を基準面1に平行にした状態で、開閉駆動される一対のフィンガー12,12により、ワーク2のフランジ部4の周面を把持して、該ワーク2を所定の作業ステーションまで搬送する。
(もっと読む)
作業システムおよび作業方法
【課題】沸騰水型原子炉のジェットポンプ近傍などの狭隘な領域に設置された配管の溶接部の洗浄、点検、検査予防保全、補修などの作業を容易に行えるようにする。
【解決手段】作業システムに、ベース24と、ベース24を水平に対して傾斜させる第1ロータリシリンダ27と、ベース24を上下に移動させる伸縮ガイド19と、アーム20と、アーム20を回動させる回転ローラ25と、アーム20に取り付けられた検査プローブ23とを備える。アーム20は、リンク22で結合された複数の部分からなる。アーム20は、隣り合う部分を結合するエアシリンダ21の伸縮により、その形状が変化する。
(もっと読む)
21 - 40 / 446
[ Back to top ]