
Fターム[3C007EV21]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 付加機能を有するもの (310)
Fターム[3C007EV21]の下位に属するFターム
異種の当接部を有するもの (33)
補助当接部材を別途有するもの (84)
一対の挟持部に複数組の当接部 (53)
物品の重量により挟持方向に付勢される (4)
指部材の長手軸線方向に移動できるもの (29)
物品を挟持したまま回転させるもの (51)
物品と当接面を相対的に直線運動させるもの (14)
Fターム[3C007EV21]に分類される特許
21 - 40 / 42
把持装置
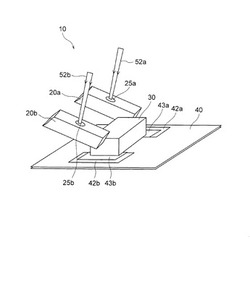
【課題】基板上に実装されるワークを把持する把持装置において、接合に熱を必要とする接合部材を用いる場合の、基板とワークとの加熱による接合を可能とする。
【解決手段】ワーク30を把持する把持部材20a、20bに、供給された光のエネルギーを熱エネルギーに変換する光熱変換部25a、25bを設け、把持部材に供給された光のエネルギーを熱エネルギーに変換することで、接合に必要な熱を接合部材43a、43bへ与える。
(もっと読む)
エアチャック装置

【課題】内部に侵入した電解加工機の電解液等が結晶化して堆積してしまうことを抑制可能なエアチャック装置を提供する。
【解決手段】ハウジング10は、内部に可動部30および伝達部41、42を収容している。可動部30は圧縮空気の作用により往復に摺動し、摺動方向の駆動力は伝達部41、42によって所定方向の駆動力として把持部51、52に伝達される。把持部51、52はこの駆動力によって互いに近づく、または遠ざかるように移動し、間に対象物を把持する。ハウジング10は、外部から伝達部収容空間120へ霧状の水を供給可能な給水ポート20を備える。これにより、給水ポート20から供給する霧状の水によって内部への電解液の侵入を抑制し、電解液の結晶を溶解することができるので、電解液等が結晶化して内部に堆積してしまうことを抑制することができる。
(もっと読む)
平行開閉チャック
【課題】フィンガーがスライド部材と爪とからなる平行開閉チャックにおいて、スライド部材に対し爪の取付け再現性が高いチャック構造の提供を課題とする。
【解決手段】2個のフィンガー13a,13bを水平方向で背反往復駆動する平行開閉チャック11であり、フィンガーはスライド部材17a,17bとこれにねじ止めされる爪14a,14bとからなる。スライド部材17a,17bはねじ用貫通孔41とスリット39を有する。スリット39は上端が閉じ下方が開放されている。爪14a,14bはねじ孔43と前記スリット39の間隔にほぼ等しい幅の突部40を側方へ突出させて有する。スライド部材17a,17bのスリット39に下方の開放箇所から爪14a,14bの突部40を係合させてねじ止めすることによりスライド部材17a,17bに爪14a,14bを固定してある。
(もっと読む)
物品移載用ロボット装置
【課題】 簡易な方法で物品に打痕などを生じさせず、均一かつ効率的な積付けを可能とする物品移載用ロボット装置を提供する。
【解決手段】物品受渡ステーション3において、物品供給手段4から受取った物品Wを、所定の積込み容器に積付ける物品移載用ロボット装置2であって、ロボットベース部20と、ロボットベース部20に回動自在に連結された多関節ロボットアーム部21と、ロボットアーム部21の先端に回動自在に連結されたロボットハンド部23とを含み、ロボットハンド部23は、バケット保持部8と、物品を収容するためのバケット部9からなり、バケット部9は、バケット保持部8に対して傾動可能に保持され、かつ角度調整駆動部12によって傾き角度の調整が可能とされる。
(もっと読む)
ロボットハンドのフィンガー部材、ロボットハンド、及び、それを有する物品移送機
【課題】フィルムキャップで被覆される被把持部を把持して移送するロボットハンド、及び、そのフィンガー部材について、フィルムキャップの切れなどの損傷を防止するための新規な構成を提案する。
【解決手段】樹脂製のフィルムキャップ60によって被覆されているビール樽4の被把持部5を把持するためのフィンガー部材2を有するロボットハンド1であって、前記フィンガー部材2の先端部に樹脂製の爪部材3を設け、前記爪部材3を被把持部5に対して当着させる構成とする。
(もっと読む)
被挿入物の把持・挿入装置および被挿入物の把持・挿入方法
【課題】 被挿入物を挿入孔に軸心を揃えて挿入するに際して、種々の大きさの被挿入物に対応することができ、簡単な構造により、短時間に、作業能率よく挿入することができる被挿入物の把持・挿入装置を提供する。
【解決手段】 被挿入物を把持して挿入孔に軸心を揃えて挿入するために使用される被挿入物の把持・挿入装置60が、3本以上の把持指65を有し、これらの把持指65は、円周方向に間隔を置いて配置されて、放射方向に進退可能にされ、把持指65の内側面は、被挿入物を把持する把持面とされ、把持指65の外側面は、少なくともその先端部に先端に行くに従い内方に向かうテーパが付されて、挿入孔の入口に接触可能にされ、被挿入物把持・挿入装置60の位置を挿入孔の位置にならわせて修正するならい機構を備えている。
(もっと読む)
把持機構
【課題】種々の形状の把持対象物体を安定して把持することが可能な小型軽量な把持機構を提供することにある。
【解決手段】把持機構10では、第2の指リンク12は第1の指リンク11の一方先端にて第1の軸線A1周りに回転可能であり、第1の指リンクは第1の軸線に直交する第2の軸線A2に沿って相互に開閉運動が可能である。これにより、第2の指リンクを互いに逆方向に回転させつつ、第1の指リンクを互いに逆方向に開閉させることにより、第2の指リンクの周面を把持対象物体の表面に沿わせることができ、一対の第2の指リンクにより把持対象物体を把持・解放することができる。このため、把持可能な把持対象物体の形状が限定されることはなく、特に円盤状の把持対象物体を安定して把持できる。更に、指リンク自体は必要最小限の大きさで良いため、機構そのものの質量の増大を抑えて軽量化することができ、搭載する駆動手段や機構部材を小型化できる。
(もっと読む)
ワーク搬送ロボット及びワーク搬出入方法
【課題】プレスブレーキへ供給し位置決めするワークを吸着保持する機能のワーク保持手段とワークをクランプする機能のワーク保持手段とを備えたワーク搬送ロボット及びワーク搬入方法を提供する。
【解決手段】ワーク搬送ロボット1にX,Y,Z方向へ移動自在に備えたロボットヘッド15に主回転軸17を回転自在に備えると共に、当該主回転軸17の軸心に対して直交する方向のワーク支持面を備えた回転フレーム23を前記主回転軸17に一体的に備え、この回転フレーム23に支持されたワークWの一辺側を把持自在又は吸着保持自在な第1ワーク保持手段27を前記回転フレーム23に備えると共に、前記ワークWの前記一辺に隣接しかつ前記一辺に交差する方向のワークの他辺側を把持自在又は吸着保持自在の第2ワーク保持手段29を前記回転フレーム23に備え、前記第1ワーク保持手段27又は第2ワーク保持手段29の一方を、前記ワークの辺に沿う方向であって他方のワーク保持手段に対して接近離反する方向へ移動可能に構成してある。
(もっと読む)
ロボット
【課題】本発明は、高精度の把持と柔軟な把持を同一の機構で実現するとともに、対象物との密着性も十分確保し、対象物の種別によらず安定な把持が可能となるロボットを提供する。
【解決手段】複数個のリンク4と、前記リンク4を連接する関節とからなるリンク連接機構と、指部5を備えたロボットにおいて、前記指部5は、第1の部材7と、前記第1の部材7よりも剛性が低い少なくとも1つの部材を備えたものである。
(もっと読む)
ロボットハンド及びそれを備えたロボット
【課題】仮組みが必要な部品の組立作業に使用されるロボットにおいて、第2の部品を第1の部品に対して仮組みできるハンドの構造を開示し、第2の部品を仮組みした後、第2の部品を仮組みしたロボットのハンドが他の作業に使用できるようにする。
【解決手段】ロボットハンドが、ロボットのアーム先端22に固定され、把持動作が可能な一対の把持部材を備えた第1のハンド21と、第1のハンド21によって把持されたときに保持ツメ16を閉じることができる第2のハンド10と、から構成され、第2の部品の穴と第1の部品の穴に挿入された第2のハンド10が、第1のハンド21によって離されたとき、保持ツメ16が付勢手段13によって開き、第2の部品が第1の部品に対して係止されるよう構成した。
(もっと読む)
ロボットハンド、ロボット及びワークの組み付け方法
【課題】コストダウン及び設備の小型化を図ることができるロボットハンド、ロボット及びワークの組み付け方法を提供する。
【解決手段】ワーク(23)を把持する第1の把持機構11及び第2の把持機構12と、第1の把持機構11と第2の把持機構12とでワーク(23)を持ち替えることができる位置に、第1の把持機構11及び前記第2の把持機構12の少なくとも一方を位置決めする位置決め機構13とを備える構成とする。
(もっと読む)
産業用ロボットのハンド装置
【課題】同一のハンド装置で、異種形状や寸法違いを含む多数のワークを把持することができる複数の指(フィンガー)を駆動する方式のハンド装置を、各指に1個のモータを必要とせず、安価で、かつ小さなサイズのハンド装置であっても大きな把持力を実現できる産業用ロボットのハンド装置を提供。
【解決手段】第1のサーボモータ3を作動させるとボールねじ2が回転し、ボールねじナット20に固定されているブロック6がスライドする。ブロック6の溝71、72、72にカムフォロア5が引っかかっているために、フィンガー4、16、16が揺動し、開閉する。第2のサーボモータ28、28を作動させると、フレーム1にボールねじ2と同軸の軸心のまわりに旋回可能に固定された1対のブラケット15、15に支持された第2のフィンガー16、16が1対の深い周溝72、72に案内されて開くように対称に旋回する。
(もっと読む)
重量物の回転装置
【課題】把持部材の作動タイミングの同期を図ることなく、重量物を回転させることができ、かつ重量物を把持していない把持部材の空回転等を防止し、重量物を安定した状態で回転させる回転装置を提供する。
【解決手段】装置本体に対向配置されて互いに接離自在に設けられた一対の把持アーム2a、2bと、これらの把持アームを接離方向に向けて移動させる駆動手段21a、21bと、把持アームの対向部にそれぞれ設けられ、互いに接近した際に重量物wを把持するとともに、把持アームの移動方向回りに回転自在に設けられた一対の把持部材31a、31bと、一方の把持アームに設けられて、一方の把持部材を回転駆動させる回転駆動手段4とを有する回転装置とした。他方の把持アーム2bには、一対の把持部材による重量物の把持が解かれた際に、他方の把持部材の移動方向回りの回転を阻止する回転阻止機構を設けた。
(もっと読む)
人工皮膚
【課題】従来の人工皮膚における、把持する物体に当接する表皮部が、物体の重量等により歪んだり捩れたりするため、物体に揺れやふらつきが生じ、安定して把持することができないという問題を解決した人工皮膚の提供。
【解決手段】シート状部材にて構成される皮膚底部2と、該皮膚底部2の表面上に部分的に配置される第1の柔軟部材11、および前記皮膚底部2の表面上における、前記第1の柔軟部材11が配置されていない部分に配置される第2の柔軟部材12により構成される表皮部3とを備え、前記第1の柔軟部材11は、前記第2の柔軟部材12よりも摩擦係数が大きく、かつ、硬度が低く構成される。
(もっと読む)
フロアカーペットモジュール搭載装置およびフロアカーペットモジュール搭載方法
【課題】助力装置の併用を前提として手作業にてカーペットモジュールを車室内に搭載するにあたり、少ない作業工数で容易に作業を行える搭載装置を提供する。
【解決手段】搬送台車はカーペットモジュール2の四隅に設けられたリテーナ11を支持部としてそのカーペットモジュール2を車幅方向で二分する縦二つ折り状態で吊り下げ支持している。助力装置3はカーペットモジュール2を吊り上げ支持するハンド5を備えている。ハンド5は、搬送台車側の支持アームと係合して相対位置決めを司るガイド突起26と、上記相対位置決め状態においてカーペットモジュール2の四隅のリテーナ11の直下までハンド5を下降させた上で上昇させることにより自律的に上記リテーナ11の穴13と係合可能なフック24とを有している。
(もっと読む)
プレートの表面との付着接触装置、および、該装置を備えるプレートの把持システム
本発明に係る、ガラス板または半導体板(ウエハ)等のプレート(3)の表面(2)に付着接触する装置(1)は、該プレート表面(2)に、吸着力により付着する付着接触面(5)を備えた可撓性材料(4)を含むベース(10)と、可撓性材料(4)からなる付着接触面(5)とプレート(3)の表面(2)との間の分離抵抗を、付着接触面(5)に垂直な方向(7)および平行な方向(8)において、異ならせる手段(6)とを備えることを特徴とする。 (もっと読む)
ロボットハンド
【課題】リモコンや電話機のハンドセット等の幅や厚みの異なる長尺物体を滑らかに移動させることが可能なロボットハンドを提供する。
【解決手段】ロボットハンド10は、親指11、人差し指12、中指13、薬指14、及び小指15と、各指11〜15の付け根を支持する手の平部16と、手の平部16に設けられた搬送ベルト機構17とを備えている。搬送ベルト機構17は、手の平部16を斜めに横切る様に配置された搬送ベルト17aを有しており、この搬送ベルト17aを矢印Aに示す様に順方向及び逆方向に回転移動させて、この搬送ベルト17aに当接する対象物を順方向及び逆方向に搬送する。この搬送ベルト17aの搬送面は、手の平部16の面に対して矢印Aの搬送方向と直交する方向で角度αだけ傾斜している。
(もっと読む)
把持装置
【課題】把持装置に把持されたワークを所定の位置に位置決めする。
【解決手段】把持装置に設けられた把持パッド28の内部には、弾性体36と球体38とが内部に収容されている。この把持パッド28は、ワークとしてのドアミラー14が挟持されると、弾性体36が撓むことで該ドアミラー14の形状に対応する形状に変形する。そして、把持パッド28の内部から気体が排気されることにより、球体38が位置決め固定される。ドアミラー14が搬送された後、把持パッド28の減圧度が低減され、これにより弾性体36、ひいては把持パッド28が元の状態に復元しようとする。これに追従してドアミラー14が押圧され、該ドアミラー14が所定の位置に位置決めされる。
(もっと読む)
鋼材ハンドリング装置のマグネットハンド装置
【課題】 平置きもしくは平積みされたワークを確実に取り出し搬送することができる鋼材ハンドリング装置のマグネットハンド装置を提供する。
【解決手段】 一対の電磁石5a、5bと、各電磁石の吸着面5c、5dが互いに相対する内向きの状態から下向きの状態まで回動するように各電磁石5a、5bを支持する開閉リンク機構6a、6bと、この開閉リンク機構6a、6bを駆動するシリンダ装置7とを本体フレーム1に設ける。
(もっと読む)
把持装置
【課題】 ガラス基板等の薄板状ワークを把持して搬送を行う把持装置において、複数のワークを搬送するのにサイクルタイムを短くすることのできる把持装置を提供する。
【解決手段】 ベースに固定された2本のフォーク2と、ベースの左右に固定した2個の位置決めシリンダ3と、フォークの根本に固定されたクランプシリンダ4と、クランプシリンダに連結されるとともにフォーク先端でガイドされた連結棒6と、位置決めシリンダおよび連結棒に固定された2対のクランプ部材8と、クランプシリンダの動作を規制するストローク規制部材10をピストン先端に固定したストッパシリンダ5より構成される把持装置であり、クランプシリンダのストロークをストローク規制部材が規制するとともに、ストッパシリンダの動きにより把持位置を2箇所に制限した把持装置を構成する。
(もっと読む)
21 - 40 / 42
[ Back to top ]