
Fターム[3C007HT12]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | リンク (192) | 平行リンク (97)
Fターム[3C007HT12]に分類される特許
1 - 20 / 97
パラレルリンクロボット
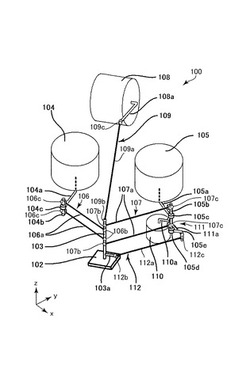
【課題】出力部材102のx、y、z方向の移動、及び、出力部材102の回動を、簡単な制御で行える構造を実現する。
【解決手段】出力部材102と第1、第2モータ104、105との間にそれぞれ第1、第2リンク機構106、107を設ける。そして、出力部材102の回転軸とz軸との平行を保持しつつ、第1、第2モータ104、105の駆動により出力部材102をxy平面に沿って移動させる。出力部材102と第3モータ108との間に第3リンク機構109を設け、出力部材102のxy平面の移動に追従しつつ、第3モータ108の駆動により出力部材102をz軸方向に移動させる。出力部材102と第4モータ110との間に第4リンク機構112を設け、出力部材102の位置に拘らず第4モータ110の駆動により出力部材102を回転させる。
(もっと読む)
パラレルリンクロボット

【課題】クリーンな環境でワークに対して作業等を行える構造を実現する。
【解決手段】第1、第2モータ104、105により出力部材102を水平方向に移動させる。第3モータ108により出力部材102を鉛直方向に移動させる。第4モータ110により出力部材102を鉛直軸回りに回動させる。出力部材102と第1、第2、第3、第4モータ104、105、108、110との間にそれぞれリンク機構106、107、109、112を設ける。そして、出力部材102を鉛直方向に対して傾斜させることなく、鉛直方向及び水平方向に移動可能、且つ、出力部材102を鉛直軸回りの回転可能とする。更に、第1、第2、第3、第4モータ104、105、108、110を、出力部材102の移動領域に対して水平方向に外れた位置に配置する。
(もっと読む)
多関節型ロボット
【課題】占有空間の縮小を図りつつ、先端部を上下に直進運動させる多関節型ロボットを得ること。
【解決手段】多関節型ロボット50は、第1回転軸13aで回転可能とされた第1アーム21と、第1アームに沿って移動するスライド部6と、スライド部に第2回転軸13bで連結された第1リンク部3と、第1リンク部に第3回転軸13cで連結された第1先端部10と、第1アームと第4回転軸13dで連結され、第1リンク部に第5回転軸13eで連結された第2リンク部4と、を備え、第2回転軸は、第1回転軸および第1アームの延びる方向と略垂直に設けられ、第4回転軸は、第2回転軸と第3回転軸との略中央に設けられ、第5回転軸は、スライド部の移動する延長線上に位置し、第4回転軸と第5回転軸との距離は、第2回転軸と第3回転軸との距離の略半分の距離とされ、第3,4,5回転軸は、第2回転軸と略平行に設けられる。
(もっと読む)
搬送ロボット
【課題】直動搬送機構を用いることなく省スペース化を図ること。
【解決手段】搬送ロボット10は、スイングアーム部11と、アームユニット12とを備える。スイングアーム部11は、基端部に設けられたスイング軸P1を中心として水平方向に揺動する。アームユニット12は、スイングアーム部11の先端部に設けられた鉛直な旋回軸P2を中心として回転する本体部121と、本体部121に連結され水平方向に伸縮する右伸縮アーム部122Rおよび左伸縮アーム部122Lと、右伸縮アーム部122Rおよび左伸縮アーム部122Lの先端にそれぞれ設けられたワーク保持部123R,123Lとを備える。
(もっと読む)
直線運動リンク機構とこれを用いた布物のたぐり展開装置
【課題】小さな形状で布辺を把持し、2つのグリッパーで持った布辺部をたぐりだし両端を把持して展開して排出するロボットハンドおよび行程長よりも本体サイズが小さな直線運動機構を提供する。
【解決手段】菱形リンク機構と、その対角線上の両支点を両端で挟むように連結した2つの同じ長さの挟持リンク機構と、挟持リンク機構どうしを連結する支点と菱形リンク機構の他の一つの支点を両端で連結した2つの同じ長さの駆動リンク機構からなる直線運動リンク機構。および前記直線運動リンク機構と2連の平行四辺形4節リンクを結合するリンク機構。2連の平行四辺形4節リンク機構を連結するリンクは支点を共有しない選択肢を持つリンク機構およびこれをもちいた布物のたぐり展開装置。
(もっと読む)
回動機構
【課題】 任意の方向に任意の大きさの重力を加えることと同等になるように、作動リンクに付勢力を与えることで、作動リンクがいかなる作業姿勢であっても安定姿勢となる回動機構を提供する。
【解決手段】 回動機構1は、鉛直方向上方に延びる鉛直支持部材3と、鉛直支持部材3に回動可能に支持されると共に、鉛直支持部材3に対して所定の角度に設定可能な傾斜支持部材5と、鉛直支持部材3に回動可能に支持される作動リンク6と、傾斜支持部材5と作動リンク6とを連結する弾性部14を含む連結部10と、を有することを特徴とする。
(もっと読む)
搬送アーム装置
【課題】可動範囲が広く、位置決め精度やメンテナンス性に優れた搬送アーム装置を提供する。
【解決手段】基台2上に基部111を枢設された第1アーム11と、その先端部112に基部121を枢設された第2アーム12と、その先端部122に基部131を枢設されたハンド部13と、第1アーム回動手段6と、第2アーム回動手段7とを有し、基台2に対する第1アーム11および第2アーム12の角度をそれぞれ変化させることでハンド部13の基部131を所定の位置に移動させる搬送アーム装置1であって、第2アーム回動手段7が、基台2上に枢設され第1アーム11と同一の回動中心114を有する回動部材14と、回動部材14と第2アーム12とを連結する連結手段20とを備えており、基台2に対して回動部材14および第2アーム12が同一方向に同一角度連動して回動するように構成した。
(もっと読む)
ハンド、ロボット及びロボットシステム
【課題】把持したボルトをシームレスにタップ穴に挿入することが可能なハンド、ロボット及びロボットシステムを提供する。
【解決手段】ハンド20は、第1のフレーム25aに設けられ、ボルトBを把持する1対の把持爪21a、21bを揺動軸AXp回りに揺動させる揺動機構29と、第1のフレーム25aに設けられ、各把持爪21a、21bを内側に支持する1対の支持部22a、22bを揺動軸AXpに沿って開閉させる開閉機構28と、把持爪21a、21bが把持したボルトBの軸回りに、第1のフレーム25aを第2のフレーム25bに対して無限回転させるボルト回転機構30と、動作する機構を1)揺動機構28及び開閉機構29又は2)ボルト回転機構30に切り替える切り替え機構32とを備える。
(もっと読む)
ハンド及びロボット
【課題】部品を把持するための腕(アーム)の姿勢変化を小さくすることが可能なハンド及びロボットを提供する。
【解決手段】ハンド35aは、1対の支持部42と、1対の支持部42の内側にそれぞれ支持され、部品を把持する1対の把持爪36と、1対の支持部42を各支持部42の長手方向と交差する揺動軸AXpに沿って開閉させる開閉機構400と、1対の把持爪36を揺動軸AXp回りに揺動させ、把持爪36の先端の向きを変更させる揺動機構500とを備える。
(もっと読む)
アクチュエータ装置およびこれを用いるロボット装置
【課題】定常的に大きな負荷が作用した場合にも効率を損なわず、柔軟な動作と周囲に対する安全を確保できるアクチュエータ装置を提供する。
【解決手段】ロボット装置やパワーアシスト装置の関節駆動に用いられるアクチュエータ機構において、選択的に駆動制御されるモータ11と、バネ要素20と、モータ駆動によりバネ要素の発生力および/またはその向きを変化させる変更機構と、バネ要素に接続された出力端22とを設けて構成する。一実施例の変更機構は、モータ駆動によって傾斜量が変化する傾斜レール16を具えるとともに、バネ要素は傾斜レールの傾斜方向へその角度に応じた力を発生し、これにより出力端が前記傾斜レールの角度に応じた力でその傾斜方向に付勢される。
(もっと読む)
ハンド及びロボット
【課題】把持したボルトをタップ穴に挿入することが可能なハンド及びロボットを提供する。
【解決手段】ハンド20は、1対の支持部22a、22bと、1対の支持部22a、22bの内側にそれぞれ支持され、ボルトBを把持する第1及び第2の把持爪21a、21bと、第1及び第2の把持爪21a、21bを各支持部22a、22bの長手方向と交差する揺動軸回りに揺動させ、第1及び第2把持爪21a、21bの先端の向きを変更させる揺動機構29と、第1及び第2の把持爪21a、21bが把持したボルトBをボルトBの軸回りに回転させるボルト回転機構30とを備える。
(もっと読む)
人間型歩行ロボット用脚とその足
【課題】人間型歩行ロボット用脚と足において、人間の脚や足による動作に類似した動作を実現するとともに人間の足に近いプロポーションを実現し、爪先関節にて異物の巻き込みの抑制を実現する。
【解決手段】能動軸43と第一支軸32aと第四支軸32dと第六支軸32fを4つの節とする第一平行リンク機構と、第二支軸32bと第三支軸32cと第五支軸32eと第六支軸32fを4つの節とする第二平行リンク機構を備え、かつ、第一支軸32aと第二支軸32bと第六支軸32fと仮想支軸を4つの節とする仮想的な平行リンク機構である仮想平行リンク機構を備え、踵側足が床面と接触する足裏面である踵側足裏面は、仮想支軸を含有するとともに仮想支軸を境とする半平面上に構成されるとともに、爪先側足が床面と接触する足裏面である爪先側足裏面は、仮想支軸を含有するとともに仮想支軸を境とする半平面上に構成した。
(もっと読む)
パラレルリンクロボット
【課題】一般に、ロボットの駆動源であるモータの取り付け方法として、モータフランジ面をプレートに固定し、このプレートを、ロボット本体に結合する構造を採用することが多い。パラレルリンクロボットにおいても、この構成が一般的である。しかしながら、従来の技術では、高速動作時の振動等の影響で、モータの主軸がぶれ、取り付け面とモータの相対位置がずれることにより、ロボットの位置決め精度が低下するという課題がある。
【解決手段】本発明のパラレルリンクロボットのモータ取付け方法は、対向するモータを取り付ける部材を有し、これを一体のブロック構造とするものである。これにより、従来の課題を解決し、少なくとも対向する2つのモータ主軸の中心軸を一致させ、高速動作時におけるロボットの位置決め精度低下を軽減する方法および装置である。
(もっと読む)
脚式移動ロボット及び揺動構造
【課題】脚式移動ロボットにおいて、ロッドと干渉することなく足首関節を適切に覆うことができる脚式移動ロボットを提供する。
【解決手段】脚式移動ロボット1は、下腿部52R,52Lに固定され、下腿部52R,52Lを覆う下腿カバー52aR,52aLと、ロッド64の外方に位置させて足部53R,53Lに連結された下部カバー82と、足部53R,53Lと共に揺動する揺動部材43cR,43cLにアーム72を介して揺動自在に連結され、且つ下腿部52R,52Lに設けられた上下方向に延びるガイド71に沿って、下腿カバー52aR,52aLと下部カバー82との間を移動自在な上部カバー81とを備える。
(もっと読む)
ロボット
【課題】ロボットの稼働中におけるアーム機構の脱落を抑制し、必要に際してアーム機構を簡便に着脱可能とし、ロボットを容易に運用可能にする。
【解決手段】ロボット1のアーム機構7が、アーム20に連結された一対のリンク21,22の間に架け渡された付勢ユニット24を備え、各リンク21,22が被係止部81,82を有し、付勢ユニット24が、付勢部材66を収容するハウジング60と、各リンク21,22の被係止部81,82にそれぞれ係止される一対の係止部61,62を有し、係止部61,62は被係止部81,82が挿通される取付孔73,78と、取付孔72,77を取り囲む周縁部74,79の一部が切除されて形成された切除部75,80とを有し、取付孔73,78が切除部75,80を介して係止部61,62の外方に開放されている。
(もっと読む)
三次元的動作機構構造体
【課題】小型化された構造で頭の動きを模することができるとともに製造コストを抑え、位置制御を確実でしかも容易に行うことのできる三次元的動作機構構造体を提供すること。
【解決手段】三次元的動作機構構造体は、頭部と、前記頭部の下方に位置するよう配設された胴部と、前記頭部に接続されるとともに、前記胴部に軸支された左右回動部材に連結され、前記左右回動部材を回動することにより、前記頭部を左右に揺動させる左右揺動用平行リンク機構と、前記頭部の前方または後方のいずれか一方に接続されるとともに、前記胴部に軸支された前後回動部材を回動することにより、前記頭部を前後に揺動させる前後揺動用リンク機構と、を備え、前記左右回動部材と前記前後回動部材とを回動することにより、前記頭部を三次元的に動作させるよう構成されている。
(もっと読む)
ロボット
【課題】簡素な構成にすることができ、しかも省エネ型に構成することができるロボットを提供する。
【解決手段】少なくとも複数本の可動脚2を備えたロボットであって、可動脚2は、胴体部に回転自在に備えた股関節部5と、股関節部5から一対の大腿部平行リンク7A,7Bを介して連結される膝関節部6と、膝関節部6から一対の下腿部平行リンク9A,9Bを介して連結される足関節部8と、大腿部平行リンク7A,7Bのうちの一方の大腿部リンク7Aの膝関節側端部に固定されたギヤ12と、ギヤ12と噛合うようにギヤ12を備える大腿部リンク7Aと同一側の下腿部リンク9Aの膝関節側端部に固定された連動ギヤ13と、股関節部5を回動させるためのアクチュエータ16とを備えさせた。
(もっと読む)
補償重量切換式荷重補償装置
【課題】 アーム等の可動部分の自重のみが補償される状態と、可動部分に荷を保持させて前記自重に荷の重量が加わった総重量が補償される状態との間で、モータ等の動力源を用いることなく自動的に補償力が切換えられるようにした補償重量切換式荷重補償装置を提供する。
【解決手段】
吊具17が空荷状態では、自重補償ばね10の補償力のみが第1ガイドロッド12を介して可動部分に作用してその自重を補償しており、この状態では付加重量補償ばね29は効果を発揮していない。吊具17に荷が掛けられるとその重量でワイヤ16が巻かれた巻胴15が回転し、これに歯車列を介して連動する切換ラック24が昇降ヘッド部7に対して上限位置から下限位置へ下降することにより、付加重量補償ばね29の補償力が第2ガイドロッド26を介して可動部分に作用し、荷の重量を含む可動部分の総重量が補償される。
(もっと読む)
パラレルリンクロボット
【課題】動作可能領域及び加減速性能を小さくすることなしに、自由度を高める。
【解決手段】パラレルリンクロボット10は、基礎部11と、可動部12と、基礎部と可動部とを連結していて基礎部に対してそれぞれ1自由度を有する三つのリンク部20a〜20cと、リンク部のそれぞれを駆動する三つのアクチュエータ13a〜13cとを具備し、リンク部のそれぞれは、基礎部に連結された駆動リンク21a〜21cと、駆動リンクと可動部とを連結していて互いに平行な二つの受動リンク22a〜22c、23a〜22cとからなっており、さらに、可動部に付属する要素19の姿勢を変更する姿勢変更機構部15、少なくとも一つのリンク部の二つの受動リンクの間においてこれら受動リンクに対して平行に配置された追加アクチュエータ13dなどと、追加アクチュエータから同軸に延びていて回転駆動力を姿勢変更機構部に伝達する動力伝達軸部39とを含む。
(もっと読む)
器用な人間型ロボットの手首
【課題】器用な人間型ロボットの手首を提供すること。
【解決手段】人間型ロボットが、胴部、一対の腕、首、頭部、手首関節アセンブリ、および制御システムを備える。腕および首は、胴部から可動可能に延在する。腕はそれぞれ、下腕および下腕に対して回転可能である手を備える。手首関節アセンブリは、下腕と手との間で動作可能に画定される。手首関節アセンブリは、ヨー軸およびピッチ軸を備える。ピッチ軸は、ヨー軸およびピッチ軸が概して垂直になるように、ヨー軸に対して離間された関係において配置される。ピッチ軸は、ヨー軸と下腕との間に延在する。手は、ヨー軸およびピッチ軸のそれぞれを中心として下腕に対して回転可能である。制御システムは、手首関節アセンブリのヨー角およびピッチ角を決定するように構成される。
(もっと読む)
1 - 20 / 97
[ Back to top ]