
Fターム[3C007KS27]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | マニピュレータの状態 (1,659) | 内部状態(摩耗、バッテリー量等) (465)
Fターム[3C007KS27]の下位に属するFターム
負荷、荷重(モータ負荷等) (133)
エンドエフェクターの状態、種類 (233)
Fターム[3C007KS27]に分類される特許
1 - 20 / 99
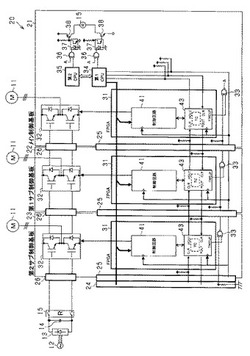
ロボットのコントローラ
【課題】ロボットのコントローラにおいて、特別なハードウェアを追加することを抑制しつつ、被検出対象が異常であることをより確実に検出する。
【解決手段】ロボットのコントローラ20は、メイン制御基板21及び第1サブ制御基板22を備える。制御基板21,22の各FPGA31は、所定速度でカウントを行うタイムカウンタTCを有し、タイムカウンタTCの値に基づいて所定規則で1ビットの参照値及び信号値POUTをそれぞれ算出し、タイムカウンタTCの値が所定値になった時に、1ビットの信号値POUTの入力及び1ビットの信号値POUTの出力をそれぞれ行う。制御基板21のFPGA31は、信号値POUTが参照値と一致しないことを条件として異常であることを検出する。第1CPU34は、上記2つのタイムカウンタTCの値を一致させた後に、制御基板21のFPGA31に異常の検出を開始させる。
(もっと読む)
ロボット

【課題】ロボットアームの機械部品の異常の有無を精度良く検出すること。
【解決手段】ロボット100は、アクチュエータAc2〜Ac15を有するアーム103L,103Rと、アーム103L,103Rの筐体の先端近傍に設けられ、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ130と、センサ130の近傍に設けられ、センサ130の出力信号をデジタル信号に変換するA/D変換器とを有している。
(もっと読む)
ロボット制御装置
【課題】モーターの性能をより多く引き出すことが可能なロボット制御装置。
【解決手段】モーターパラメーター記憶手段40と、慣性モーメント計算手段10と、移動距離計算手段20と、速度指令曲線計算手段30と、速度指令曲線計算手段30により生成された速度指令曲線に従ってモーター72を制御するモーター制御装置60と、を備えるロボット制御装置75であって、モーター72の内部温度を測定するモーター温度測定手段50をさらに備えており、モーターパラメーター記憶手段40は、内部温度によって変動する可変パラメーターについては許容最大値よりも低い内部温度下で使用された場合の増大する方向に補正されたモーターパラメーターを含めて記憶しており、速度指令曲線計算手段30は、補正されたモーターパラメーターを用いて速度指令曲線310を生成するロボット制御装置75。
(もっと読む)
医療用マニピュレータ
【課題】駆動源から先端動作部に駆動力を伝達する動力伝達経路上に設けられた可撓性を有する動力伝達部材の異常の有無を判断できる医療用マニピュレータを提供する。
【解決手段】医療用マニピュレータ10において、モータ50a、50bの駆動力はワイヤ80a、80bを介して先端動作部12に伝達される。モータ50a、50bは、コントローラにより駆動制御される。コントローラ29は、始業前点検として、規定信号に従ってモータ50a、50bを動作させ、エンコーダ51a、51bからの信号に基づいてモータ50a、50bの動作角度を監視し、モータ50a、50bが目標角度に達するのに要する動作時間に基づいて、ワイヤ80a、80bの異常の有無を判断する。
(もっと読む)
ロボット装置
【課題】可動部の静止保持状態を維持したまま即座にモータの出力値を低減させることができるロボット装置を提供する。
【解決手段】ロボット装置1は、モータによってアーム部6を関節部5を介して可動させるロボット本体2と、モータの出力値を制御するECU4と、を備えている。ECU4は、アーム部6が静止保持状態のとき、発生している関節出力指標値に基づいてモータの出力値を制御する。よって、ロボット装置1では、静止保持状態でモータの出力値を低減する際に、アーム部6が動き出すまで少しずつ該出力値を低減させる必要がなくなる。
(もっと読む)
アークセンサにおける狙い位置修正方法及びロボット制御システム
【課題】
狙い位置を手動により調整する機能を複数パスの連続溶接に適用することができるアークセンサにおける狙い位置修正方法及びロボット制御システムを提供する。
【解決手段】
先に行われる教示パスにおいて、ティーチペンダント40又は手動狙い調整器70により狙い位置の調整が行われた場合、その調整結果を後の教示パスで利用するか否かをティーチペンダント40により設定する。調整結果を利用すると設定された場合、後に行われる教示パスではCPU22は調整結果に基づいて内部オフセット値を更新すると印加電圧及び更新後の内部オフセット値に基づいてマニピュレータ10を移動制御する。調整結果を利用しないと設定された場合、後に行われる教示パスではCPU22はアークセンサユニット50が検出した印加電圧に基づいて、マニピュレータ10を移動制御する。
(もっと読む)
搬送装置
【課題】シートが伸びたことを検知し、作業者に報知することができる搬送装置を提供する。
【解決手段】搬送装置1は、直動装置を構成するレール10及びスライダ20と、スライドユニット30と、可撓性のシートとを有する。スライドユニット30は、その移動方向に沿って、シートを収容し、スライドベース31と、方向転換部とを有する。スライドユニット30には、シートが所定の長さ以上の伸びを発現したときに該シートの過剰な伸びを作業者に報知する報知手段が設けられている。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】状況に応じて、3次元計測のためのパターン光の点灯及び非点灯を適切に切り替えることが可能なロボット装置及びロボット装置の制御方法を提供する。
【解決手段】外部の環境にパターン光を照射する照射部と、外部の環境を撮像して画像を取得する撮像部と、外部の環境を認識する外部環境認識部と、画像の取得状態に基づいて、パターン光の照射が必要であると判断したとき照射部を点灯に制御する照射判断部と、外部の環境に基づいて、パターン光の照射が不要である又はパターン光の照射を強制停止すべきであると判断したとき照射部を非点灯に制御する消灯判断部とを備える。
(もっと読む)
パラレルリンク型ロボット及びその異常検知方法
【課題】いずれかのリンクの制御に異常が発生したことを検知するパラレルリンク型ロボットを提供する。
【解決手段】パラレルリンク型ロボット100は、第1部材11に連結されている第2部材12のN自由度の姿勢を制御することができる。ロボット100は、N本の主リンク13、補助リンク15、センサ17b、及びコントローラ20を備える。N本の主リンクは、夫々が第1部材と第2部材を連結しており、アクチュエータ14によって伸縮する。補助リンク15は、第1部材と第2部材を連結しており、外力によって受動的に伸縮する。センサ17bは、補助リンクの長さを計測する。コントローラ20は、第2部材の姿勢を目標姿勢に一致させるように主リンクの長さを制御する。コントローラ20は、計測された補助リンクの長さが第2部材の姿勢が目標姿勢に一致した場合の補助リンクの予定長さと異なる場合に、リンクの制御に異常が発生していると判断する。
(もっと読む)
腱駆動マニピュレータ内の生体内張力較正
【課題】マニピュレータを分解することなく、及び外力基準なしで、腱駆動マニピュレータ内の腱への張力センサを較正する方法を提供すること。
【解決手段】この方法は、運動学的に一貫した結果を生み出すために、互いに対して張力を較正する。結果は、完全に正確ではない可能性があるが、初期または名目較正に対して最適化される。この方法は、腱を緩ませるステップと、腱への張力を測定するセンサからのセンサ値を記録するステップとを含んでいる。この方法はさらに、いかなる障害物または関節限界と接触しないように位置決めされたマニピュレータで腱に張力を加えるステップと、センサ値を再び記録するステップとを含んでいる。この方法はその後、マニピュレータへのゼロトルク制限を満たし、名目較正値に対する誤差を最小限に抑えるセンサパラメータを判断するために回帰プロセスを行なう。
(もっと読む)
スポット溶接システム
【課題】撮像装置を用いることなくワーク位置修正を可能とする。
【解決手段】可動電極駆動用のサーボモータ24のトルクまたは速度と相関関係のある物理量を検出する物理量検出手段24aと、一対の電極21,22の位置を検出する位置検出手段13a,24aと、動作モードを切り換えるモード切換手段6と、スポット溶接モードにおけるスポット溶接処理および位置修正モードにおける位置修正処理を実行する処理手段3,4とを備える。処理手段3,4は、位置修正モードに切り換えられると、可動電極21がワーク表面に当接するようにスポット溶接ガン2およびロボット1を制御するとともに、物理量検出手段24aの検出値に基づき、可動電極21がワーク表面に当接したか否かを判定し、そのときの位置検出手段13a,24aの検出値に基づき、ワーク位置を演算する。
(もっと読む)
ロボットの動作診断方法、ロボットの制御装置、ミニエンバイロメントシステムの制御装置、ロボット、及びミニエンバイロメントシステム
【課題】ロボット動作を診断して不具合を回避することができ、かつ、異常部位の詳細表示やパネル上でのロボット動作の再現により、メンテナンス時間を短縮できるロボットの動作診断方法を提供する。
【解決手段】複数の駆動軸をそれぞれ駆動する複数のモーター、マニピュレータ、及びセンサを有し、駆動軸によりマニピュレータを移動させるロボットの動作診断方法において、少なくとも1つの駆動軸に対し、ロボットの診断対象とする動作パターンを設定し、ロボットの初期状態での動作パターンにおいて、複数回計測したモーターを制御する制御装置の複数の入出力信号と、センサまたはマニピュレータを制御する機器の複数の入出力信号とを判定データとし、新たに計測した判定データを診断データとし、統計的パターン認識方法により診断データが判定データに含まれるかを判別することにより、新たに計測した時のロボットの動作が正常であるか判定する。
(もっと読む)
ロータリ直列型弾性アクチュエータ
【課題】器用な人間型ロボット用の上腕アセンブリを作動させるためのロータリアクチュエータアセンブリを提供すること。
【解決手段】人間型ロボットのための上腕アセンブリは、それぞれが軸を画定する複数の腕サポートフレームを備える。複数のロータリアクチュエータアセンブリがそれぞれ、各軸を中心として複数の腕サポートフレームの中の1つに設置される。各ロータリアクチュエータアセンブリは、各軸を中心として設置されたモータと、モータに回転可能に連結されたギアドライブと、ねじりばねとを備える。ねじりばねは、ギアドライブの出力部に回転可能に連結されたばね入力部と、関節のための出力部に連結されたばね出力部とを有する。
(もっと読む)
移動体装置
【課題】操作者の操作意図を適切に推定し、ロボットを移動する。
【解決手段】ZMP検出手段22が、接地面(走行面)に沿って移動するロボットのZMPの位置を検出し、操作意図推定手段44が、ZMP検出手段22により検出される、操作者からロボットに対して加えられた力により移動したZMPの位置に基づいて、操作意図を推定し、移動手段42が、操作意図推定手段44により推定された操作意図に基づいてロボットを移動させる。
(もっと読む)
自動作業システムにおけるロボットの診断方法及び診断プログラム
【課題】 位置決めロボットと作業ロボットとの協調作業の際に生じ得る位置ズレ量を検出してこのズレ量に基づいて位置決めロボット又は作業ロボットに異常が生じたか否かを診断する。
【解決手段】位置決めロボット100が保持ツール105により保持したワークを作業ツール205の目標位置に搬送して位置決めするとともに、作業ロボット200がワークに対し所定の作業を行う際、ロボット制御装置300が、第1のロボットアーム110の先端部位又はワークに設けられた慣性センサ106において検出される慣性力に基づいて保持ツール105の位置ズレ量を検出し、検出した位置ズレ量ΔP1を用いて位置決めロボット100に異常が発生したか否かを検出する。
(もっと読む)
ロボット制御装置及びロボット操作用デバイス
【課題】ワークをツールでグリップしたロボットを、操作者がワークを直接動かすのと同じ感覚で操作者の意図する通りに、イネーブルスイッチの操作を併用しながらスムーズに操作できるようにすること。
【解決手段】ロボットのグリッパ17でグリップしたワーク21の対向する2面に、着脱ユニット63の吸着盤63aを用いてロボット操作用デバイス60のベース61をそれぞれ固着する。ベース61に力覚センサ65を介して取り付けられた各ロボット操作用デバイス60の操作ハンドル67を両手で把持した操作者が、操作ハンドル67のイネーブルスイッチ67bをオン操作しながら、ワーク21を動かす操作力を各操作ハンドル67にそれぞれ加える。各操作力を方向別に力覚センサ65で検出してその検出信号をロボットの制御装置に出力し、制御装置は検出信号に基づいてロボットを動作させる。
(もっと読む)
カッティングプロッタ
【課題】キャリッジを移動可能に支持するガイドレール等に曲がりが発生していても、当該曲がりによる切削加工の品質劣化を防止できるカッティングプロッタを提供する。
【解決手段】シート状の被加工媒体を支持する加工テーブルと、加工テーブルに支持された被加工媒体の上方に設けられ被加工媒体の切削加工を行うエンドミルと、加工テーブルの上方に設けられ、エンドミルを前後、左右、または上下に移動可能に支持するガイドレール31、Yバー32及び切削駆動機構と、エンドミルを前後、左右、または上下に移動させて被加工媒体を切削加工するように制御するコントロールユニット50とを備えたカッティングプロッタにおいて、ガイドレール31及びYバー32の曲がりを検出するキャリッジ形状測定機構100を備え、検出されたガイドレール31及びYバー32の曲がりに基づいて加工具の移動方向を補正する制御が行われる。
(もっと読む)
位置制御方法、ロボット
【課題】ロボットのアームが変形する場合にもアームを位置精度良く制御する方法を提供する。
【解決手段】手部16の位置を制御する位置制御方法にかかわる。手部16の移動と手部16の移動量の検出とを並行して行い、手部16を目標とする場所に接近させる制御を行う第1移動工程と、手部16の移動と手部16が位置する場所の検出と目標とする場所の検出とを並行して行い、手部16を目標とする場所に移動させる制御を行う第2移動工程と、を有する。
(もっと読む)
脚補助装具
【課題】ユーザに違和感を与えることなく立ち上がり動作や着座動作を補助することのできる脚補助装具を提供する。
【解決手段】脚補助装具は、リンク機構、アクチュエータ、角度センサを備えている。リンク機構は、大腿リンクと下腿リンクがジョイントによって揺動可能に連結されている構造を有している。大腿リンクと下腿リンクを夫々ユーザの大腿と下腿に固定すると、ジョイントがユーザの膝関節に隣接して位置する。アクチュエータはジョイントを駆動する。脚補助装具は、ジョイントを駆動することによって、大腿リンクと下腿リンクが揺動して脚の動作を補助する。角度センサは、ジョイントの角度を検出する。本発明の脚補助装具は、検出された初期ジョイント角から予め定められた最終目標角まで、等加速等減速の三角速度パターンでジョイントを駆動することを特徴とする。
(もっと読む)
手術用マニピュレータ及び手術用マニピュレータシステム
【課題】 少ないアクチュエータの数でワイヤの張力調整を行うこと。
【解決手段】 手術用マニピュレータ11は、その先端側でピッチ方向に回転可能な支持体19と、ヨー方向にそれぞれ独立して回転可能となるように支持体19に支持された第1及び第2の先端プーリ21,22と、プーリ21,22にそれぞれ一体化された第1及び第2のブレード24,25と、第1のプーリ21に固定された第1及び第2のワイヤ51,52と、第2のプーリ22に固定された第3及び第4のワイヤ53,54と、第1〜第4のワイヤ51〜54を押し引きする第1〜第4のモータ56〜59とを備えている。第1及び第2のワイヤ51,52は、引張力が作用したときに、相反する方向に第1の先端プーリ21を回転させ、第3及び第4のワイヤ53,54は、引張力が作用したときに、相反する方向に第1の先端プーリ22を回転させる。
(もっと読む)
1 - 20 / 99
[ Back to top ]