
Fターム[3C007NS13]の内容
マニピュレータ、ロボット (46,145) | ワークの状態 (1,085) | 種類 (720) | 基板 (502) | 半導体ウエハ (205)
Fターム[3C007NS13]に分類される特許
1 - 20 / 205
薄板状物の把持装置、および薄板状物の把持方法
【課題】
摩擦による塵埃の発生及び飛散を抑制し、従来の搬送ハンドからの置き換えが容易に且つ安価に出来、軽量で、かつ狭隘な場所にもアクセス可能な薄型の把持装置を提供すること。
【解決手段】
把持装置22は、内部に圧縮気体流通のための流路36と、圧縮気体を噴出させる噴出口30を有する搬送フィンガ23と、搬送フィンガ23先端に固定された第1の把持部材26と、駆動手段28によって動作させられる第2の把持部材29とを具えている。圧縮気体の噴出力によって浮上させられた薄板状物の周縁部を、第1の把持部材26と第2の把持部材29とで、位置ずれ補正を行いながら把持する。
(もっと読む)
ワーク搬送装置

【課題】低床化を維持しつつ高速でのワーク搬送を行うのに適したワーク搬送装置を提供する。
【解決手段】ワーク搬送装置Aは、固定ベース1と、固定ベース1に支持されて昇降する昇降ベース2と、昇降ベース2に対して垂直軸O1周りに回動可能に支持された第1アーム3と、第1アーム3の先端に対して垂直軸O2周りに回動可能に支持された第2アーム4と、第2アーム4の先端に対して垂直軸O3周りに回動可能に支持されたハンド5Aと、ハンド駆動機構6Aと、を備え、ハンド駆動機構6Aは、第1アーム3の内部に配置されたモータ61aと、第1ないし第2アーム3,4の内部に配置され、モータ61aの出力をハンド5Aに伝達する伝動機構62aと、を含む。モータ61aと伝動機構62aの一部とを第1アーム3の内部空間に配置することで、第2アーム4先端の伝動機構62aの高さおよび固定ベース1ないし昇降ベース2の高さが低くなる。
(もっと読む)
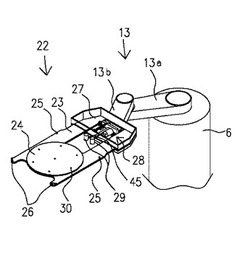
ウエハ搬送ロボット
【課題】半導体ウエハを対向するチャンバ間でスムーズに移動することのできる搬送ロボットを提供する。
【解決手段】ウエハ搬送ロボット100は、2本のリンク12、13で構成されているアーム10を備える。アーム10の先端にはウエハホルダ6が備えられている。アーム10の基部に相当する駆動リンク13は筐体2に回転可能に連結されている。アーム10は、駆動リンク13の回転に伴うアーム先端の運動が直線又は曲線の軌道に制限される構造を有しているとともに、その軌道は、始点Wsと終点Weが駆動リンク13の回転中心から等距離の位置にあり、始点におけるアーム先端の向きと終点におけるアーム先端の向きが、始点と終点の間の中点と前記回転中心を通る直線に対して鏡像の関係を満たしている。
(もっと読む)
搬送ロボット及びその基板搬送方法
【課題】移動速度を上げなくても搬送時間を短縮することができる搬送装置を提供する。
【解決手段】搬送ロボット50は、第1及び第2ハンド52,53を備えている。第1及び第2ハンド52,53は、基板6を夫々保持する2つのブレード56を有している。また、搬送ロボット50は、回動ユニット、第1進退ユニット、第2進退ユニット、昇降ユニットを有しており、これら4つのユニットにより第1及び第2ハンド52,53を基板6が載置されている基板搬送中継装置25及び4つのプロセスチャンバ23に夫々移動させることができるようになっている。
(もっと読む)
搬送ロボット用エンドエフェクタ
【課題】搬送物の状態に応じて使い分けることができるエンドエフェクタを、簡単な構造によって達成すること。
【解決手段】本発明のエンドエフェクタにおいて、アームの先端部に装着されるハンド基部と、ハンド基部に回転可能に設けられた複数の基板保持部材と、複数の基板保持部材を各回転軸線周りに回転させる回転駆動手段と、を備える。複数の基板保持部材のそれぞれは、回転軸線に沿って延在する細長部材を有し、回転軸線周りに細長部材を回転させることによって、細長部材の側面全体のうちの基板を保持する部分が変わるように構成されている。
(もっと読む)
真空ピンセットおよび真空吸着方法
【課題】手作業による操作ミスがあったとしても被処理体の吸着ミスを防止し、確実に吸着・脱着動作を行うことが可能な真空ピンセットを提供する。
【解決手段】本発明の真空ピンセットは、長尺状の本体2と、前記本体の一端部に設けられ、平板状の被処理体を吸着し保持する第一機能部10、および、前記被処理体とは異なる対象物の有無を識別する第二機能部20と、を少なくとも備えた真空ピンセット1A(1)であって、前記第二機能部における前記対象物の有無の識別結果に基づき、前記第一機能部における前記被処理体の吸着条件を切り替える制御手段30を有すること、を特徴とする。
(もっと読む)
ウエハ搬送用アームとウエハ搬送装置
【課題】本発明は、ウエハを真空吸着して所定のウエハの搬送を終えた後に、ウエハをウエハ吸着部から容易に離脱させることができるウエハ搬送用アームとウエハ搬送装置を提供することを目的とする。
【解決手段】本願の発明にかかるウエハ搬送用アームは、非弾性体で形成され、開口を有するウエハ吸着部と、該ウエハ吸着部と接続され、該開口に通じる吸気路を有する支持部と、を備えたことを特徴とする。
(もっと読む)
保持部材の姿勢判定装置、その方法、基板処理装置及び記憶媒体
【課題】 保持部材の姿勢に異常があるか否かを確実かつ容易に検出すること。
【解決手段】 保持部材であるフォーク3Aを前進させたときに、当該フォーク3Aがその前を通過するように、フォーク3Aの進行方向に対して側方にラインセンサ4を設ける。そして、フォーク3Aをラインセンサ4に対して進退させたときに、当該フォーク3Aの上下方向の位置と、フォーク3Aの進退方向の位置とを対応付けたデータを取得する。この取得されたデータに基づいて前記進退方向の位置に対して上下方向の位置を二次微分した値を演算し、この値に基づいて保持部材の姿勢の異常の有無を判定する。
(もっと読む)
基板搬送アーム及び基板搬送装置
【課題】自重で撓んだ状態の基板を破損させずに基板収容容器から取り出すことができる基板搬送アームを提供する。
【解決手段】基板搬送アーム1は、基板収容容器内に水平に置かれた基板の下側に挿入されて、この基板の裏面を支持しつつ基板を前記収容容器から搬出する。基板搬送アーム1は、基板が搬出されるときに基板の裏面を支持する載置面12sを有する載置部と、当該基板搬送アーム1が基板の下側に挿入されるときに、基板の裏面を少なくとも載置面12sの高さにまで押し上げる押上部12rとを備える。
(もっと読む)
基板処理装置及び基板搬送方法並びにその方法を実施するためのプログラムを記憶する記憶媒体
【課題】ピックによる基板保持時に基板の異常を判定することで,異常な基板の搬送処理を続行することによる不具合を未然に防止する。
【解決手段】基板が水平方向に移動しないように規制する規制体420と,押圧体440をスライド駆動させて,ウエハWの端部を規制体に押しつけることによって保持する押圧保持部430と,押圧体を駆動させるとともに,その押圧体の位置情報を出力可能な押圧体駆動部442とを有するピックを備え,このピックの基板保持時に押圧体をスライド駆動させてその押圧体が停止した位置を検出し,その検出位置が異常判定閾値以上にピックの先端側にある場合にはその基板は異常であると判定し,その基板の搬送処理を停止する。
(もっと読む)
治具、搬送ロボット、円盤状搬送対象物アライメント方法
【課題】単一のセンサを利用してハンドに載置したウェーハの位置と正規の載置位置との差異を正確に求める。
【解決手段】XY座標系上で移動するハンド23に着脱可能に取り付けた治具5を用いて、単一のセンサ6に対するウェーハの半径Wを算出し、その半径の値Wを利用してハンドに載置したウェーハの位置と正規の載置位置との差異を求める。具体的には、円盤状搬送対象物の半径Wと同一の半径Wであり且つ中心51aをX軸上に一致させた第1部分円弧部51のセンサ6に対する通過距離と、円盤状搬送対象物の半径Wと同一の半径Wであり且つ中心52aをY軸方向に所定寸法変位させた第2部分円弧部52のセンサ6に対する通過距離と、中心51a,52a間のY軸方向の変位量ΔYaとを利用してセンサ6に対するウェーハの計算上の半径Wを算出する。
(もっと読む)
搬送ロボット、円盤状搬送対象物アライメント方法
【課題】単一のセンサを利用してハンドに載置したウェーハの位置と正規の載置位置との差異を正確に求め、ウェーハを正確に搬送する。
【解決手段】ハンドに載置したウェーハ7のセンサ6に対する通過距離と、ハンド上における正規の載置位置に載置保持したウェーハ7がセンサ6を通過する距離と、ウェーハの半径とを利用して、ハンドに載置したウェーハ7の位置と正規の載置位置との差異を求める載置位置差異算出手段42と、その差異を旋回軸31a及びアーム2のロボット動作極座標系における補正値に変換して算出する補正値算出手段43と、その補正値を出力する補正値出力手段44とを有する搬送ロボット1とした。
(もっと読む)
産業用ロボット
【課題】搬送対象物が上下方向で重ならないように配置される第2配置位置と産業用ロボットとの間にゲート部が配置されていても、本体部に対するハンドの旋回半径を小さくしつつ、ハンドとゲート部との干渉を防止することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、第1ハンド3および第2ハンド4と、アーム5と、本体部6とを備えている。第1ハンド3の基端部と第2ハンド4の基端部とは、上下方向で重なるようにアーム5の先端部に取り付けられている。第1ハンド3と第2ハンド4とは、アーム5に対して個別に回転可能であり、かつ、上下方向から見たときにアーム5に対して共通の回転中心C1を中心にして回転可能である。また、第1ハンド3と第2ハンド4とは、上下方向から見たときに屈曲するように形成され、かつ、上下方向から見たときに回転中心C1を通過する所定の仮想線に対して略線対称に形成されている。
(もっと読む)
多関節ロボットアーム型搬送装置の軌道情報生成装置
【課題】始点から終点までの搬送対象物を直線移動させるにあたり、移動時間の短縮と振動の低減とを両立した軌道情報生成装置を提供する。
【解決手段】多関節ロボットで搬送対象物を直線移動させるにあたり、搬送装置103の動力学モデルに基づいて始点Sから終点Eまでの移動に要する時間teをパラメータの一つとして含む評価関数の値が最小となるように最適化手法を用いて軌道情報132を生成する。動力学モデルとして搬送対象物Wを搬送する先端リンクの動作を直線動作に限定したモデルを予め設定しておき、予め設定された搬送装置の振動特性を用いて先端リンクの移動により生じる模擬振動の大きさ(x−xa)を算出し、算出した模擬振動の大きさ(x−xa)をパラメータの一つとして評価関数に含め、少なくとも上記2つのパラメータである移動時間te及び模擬振動の大きさ(x−xa)を含む評価関数の値が最小となるように軌道情報132を生成する。
(もっと読む)
支持装置及び支持方法
【課題】凸部が設けられた半導体ウエハ等の板状部材を支持して搬送する際に、当該支持の安定化を図ることができ、凸部に接触する接触面を当該凸部から簡単に切り離すことができるようにすること。
【解決手段】凸部W1が設けられた半導体ウエハWの支持装置12であり、当該装置は、凸部W1の先端に接触可能な接触体26と、半導体ウエハWに吸引力を付与する吸引手段30とを含む。接触体26は、接触面26A側に貫通する吸引口40を備えた自粘性を有する材料によって構成されている。接触体26を無負荷状態で断面視したときに、接触面26Aは、吸引口40に向かって先細となる形状をなす。接触面26Aは、半導体ウエハWを支持したときに、凸部W1の先端面形状に合わせて変形可能に設けられる。
(もっと読む)
リンク式ロボットアーム装置
【課題】アームの制御性低下を効果的に抑制するとともに、吸着ON・OFF状態の切替応答性が向上するリンク式ロボットアーム装置を提供する。
【解決手段】アームの先端側に配置され且つ吸着用エア供給口C3を有するエンドエフェクタCによって搬送対象物を吸着保持可能なリンク式ロボットアーム装置Xとして、アーム1の内部に設けたエア管4を介して吸着用エア供給口C3に接続され、吸着用エア供給口C3に吸着用エアを供給可能な状態と、吸着用エア供給口C3への吸着用エア供給を停止する状態との間で切替可能な吸着切替ユニット3を備え、この吸着切替ユニット3を、アーム1のうちアーム長1Lの半分1Cよりもシータ軸J3に近い位置に設けた。
(もっと読む)
真空処理装置
【課題】真空処理装置において、試料の位置ずれが発生した際にそのずれ量を抑制し、予期しない搬送動作の停止を防ぐ。
【解決手段】試料の搬送を行う真空搬送室において、ロボットによる前記搬送の動作中に生じるアーム上に載せられたウエハの加速度はアームの伸長の開始または収縮の終了の際の加速度が最大であって、搬送中の試料の位置ずれを検出し、そのずれ量が所定の閾値(許容値)を超えた場合に、ロボットのアームの伸長の開始または収縮の終了の際の加速度をA‘からAに低下させてずれ量が閾値を超えないようにする。
(もっと読む)
ロボット制御装置
【課題】ロボットが一方の動作から他方の動作にスムースに移行することができるロボット制御装置を提供することを目的とする。
【解決手段】ロボットの連続した動作を切り換えるロボット制御装置30であって、前記動作に対応する複数のコントローラを備え、前記ロボットの状態が、切り換え後の動作における拘束条件から導出された不変集合に属すると、切り換え後の動作に対応する前記コントローラの初期状態を算出し、前記コントローラを動的に切り換えるものである。
(もっと読む)
真空ピンセット及び真空吸着方法
【課題】反りがある半導体ウエハに対して、安定して吸着することができ、かつ、半導体ウエハを平らに矯正することができる真空ピンセット。
【解決手段】本体2と、本体2の端部に設けられた支持部3と、一端が支持部3に接続され、他端に吸着部5を備えた複数の先端部材4と、を少なくとも備え、先端部材4と支持部3と本体部2の内部に吸引流路10a〜10cが設けられた、反りを有する平板状の被処理体用Wの真空ピンセット1Aであって、複数の先端部材4は、反りの形状に合わせるように、及び、反りを矯正するように、支持部3に対して可動であることを特徴とする真空ピンセット1A。
(もっと読む)
ダブルアーム型ロボット
【課題】独立して2組の多関節アームの高さを変化可能なダブルアーム型ロボットを提供する。
【解決手段】第1及び第2の多関節アーム12、第1の多関節アーム11の一端が回動可能に連結される第1のアーム支持部16と、第2の多関節アーム12の一端が回動可能に連結される第2のアーム支持部17と、第1及び第2のアーム支持部17の第1及び第2の多関節アーム12と反対側の一端を鉛直方向に移動可能に保持しており、基台15に固定される基柱14と、第1及び第2の多関節アーム11,12をそれぞれ回動させる第1及び第2のアーム駆動部と、第1及び第2の多関節アーム11,12のハンド部23,33をそれぞれ回動させる第1及び第2の関節回動部と、第1及び第2のアーム支持部16,17を基柱14に対してそれぞれ独立して移動させる第1及び第2の上下駆動部とを備える。
(もっと読む)
1 - 20 / 205
[ Back to top ]