
Fターム[3C030BC04]の内容
Fターム[3C030BC04]の下位に属するFターム
把持力を調節する部材を有するもの (3)
把持爪の開き量を調節する部材を有するもの (5)
Fターム[3C030BC04]に分類される特許
1 - 20 / 220
車体組立システム
位置決め装置
【課題】 被移載物の下方に挿入された被載置部材の所定位置に被移載物が載置されるように、被載置部材を簡単な装置構成で位置決めする位置決め装置を提供する。
【解決手段】 位置決め装置は、可動部と、可動部を移動方向に変位駆動する駆動手段と、一端部が可動部に連結され、移動方向に伸縮可能に延設される弾性部材と、弾性部材の他端部が連結され、可動部の変位に伴って近接方向に変位する位置決め部材とを含み、位置決め部材は、近接方向への変位によって被移載物に接触する上段接触部と被載置部材に接触し、かつ上段接触部に対し所定の位置に配置された下段接触部とを含む。駆動手段は、位置決め部材が被移載物に接触するのに必要な変位量を超えて可動部を変位させ、弾性部材は、可動部が変位するとき、上段接触部が被移載物に接触するまでは、位置決め部材を近接方向へ変位させ、被移載物に接触後は、可動部の変位に伴って伸長または収縮する。
(もっと読む)
搬送装置及び搬送方法

【課題】回転方向の位置ずれを抑制し、高精度な位置決めを行うことができる搬送装置を提供する。
【解決手段】本発明に係る搬送装置は、支持部11に対しフローティング状態で設置される搬送プレート12と、搬送プレート12と一体に変位可能な第1位置決め部16と、搬送プレート12に対向して配置されたワーク21が載置される冶具プレート20と一体に変位可能であり、第1位置決め部16に嵌合することにより搬送プレート12の位置を規制する第2位置決め部19とを有し、第1位置決め部16及び第2位置決め部19が回転防止可能な形状であることを特徴とする。
(もっと読む)
電池組付け装置
【課題】電池把持手段(把持治具)が的確にワークを把持できるように、並べられた複数個のワークを適切な力で押圧することができる電池組付け装置を提供すること。
【解決手段】電池組付け装置40は、電池供給部53から供給される電池20を把持する把持治具52を備え、電池20と枠体30を組付けるものである。電池供給部53は、ワーク20(電池20)を水平方向に複数個並べて配置する搬送路81と、搬送路81に並べられた複数のワーク20のうち一端側のワーク20Aを押圧して他端側のワーク20Hを把持治具52へ水平方向に供給する押圧部材82と、重力により落下する所定重量の錘83A〜83Hと、錘83A〜83Hに作用する重力を押圧部材82に伝達するロープ84を有する。各錘83A〜83Hは、鉛直方向に所定距離Y1ずつ離れて設けられ、落下に伴い下側から順次接地して押圧部材82に作用する力を順次減少できるように配置されている。
(もっと読む)
組み付け装置、およびその方法、組み付け動作プログラム
【課題】本発明は、被組み付け部品の位置ずれに関わらず、組み付け動作を適切、かつ、効率的に行うことができる組み付け装置、およびその方法、組み付け動作プログラムの提供を目的とする。
【解決手段】本発明にかかる組み付け装置は、制御部2が、組み付け部品100の3次元モデルデータにおいて規定された組み付け部品100の第1基準点に対応する第1基準位置としてのTCP把持位置201と、被組み付け部品101の3次元モデルデータにおいて規定された組み付け部品100の第2基準点に対応する第2基準位置としてのTCP組み付け位置202とを対応させるように、作業部1の動作を制御する。
(もっと読む)
電池パックの組立治具
【課題】従来の組立装置では取り扱うことが難しい小規模な電池パックを、効率よく組み立てることができる簡易な組立治具を提供する。
【解決手段】本発明の一実施形態に係る組立治具1は、スタックアッシー23を挟圧して保持するクランプ部材6・6と、スタックアッシー23に対して位置決めした電池ケースを構成するロアケース24を係止する係止部たる爪部8・8・・・と、を備える把持部4と、把持部4を支持する、該把持部4の基準面(本実施形態では水平面(上面部2a))に対する傾斜角度を変更可能な支持アーム3と、把持部4を前記傾斜角度で傾斜された面上で回転可能に支持する回転機構7と、を備える。
(もっと読む)
電池組付け装置
【課題】電池と枠体とを高精度に組付け生産性の高い電池組付け装置を提供すること。
【解決手段】一端側を中心にして他端側端部が同一円周上を回転する回転アーム21,31および、電池2又は枠体3を把持して回転アーム21,31の他端側端部に揺動可能にピン結合された先端治具22,32を備え、先端治具22,32が回転アーム21,31に対して回転方向に所定角度傾くように伸縮可能な弾性部材23,33によって連結された電池組付け手段11および枠体組付け手段12と、対になった回転アーム21,31を逆方向に同期して回転させる駆動機構とを有し、電池組付け手段11および枠体組付け手段12は、両方の回転アーム21,31の回転中心を結んだ直線上に移動させた電池2および枠体3に対し、回転アーム21,31と先端治具22,32を介して電池2および枠体3の略中央部にほぼ直交するように押し付け力を作用させる電池組付け装置10。
(もっと読む)
電池パックの移載装置および電池パックの移載方法
【課題】コンテナ(国内および海外出荷用コンテナ)の種類に関わらず、統一された保持方式によって電池パックを保持することができ、また電池パックの仕様に応じてクランプ爪を取り換える必要もなく、生産性の高い多品種生産にも対応可能な電池パックの移載装置および移載方法を提供する。
【解決手段】ロアケース54の左右両側端部の前後方向中央部には、平面視矩形状の凹部54a・54bが前後方向に延出して形成され、各凹部54a・54bの形状、およびロアケース54の長手方向における各凹部54a・54bの配設位置は、形状の異なる全てのロアケース54を通じて統一され、移載装置1は、ロアケース54の各凹部54a・54bにおける延出方向側の両端部を嵌合可能なクランプ爪2を備え、電池パック50を出荷用パレット160上に移動させる際は、クランプ爪2によってロアケース54の凹部54a・54bを挟持して、電池パック50を支持する。
(もっと読む)
組立ロボットとその制御方法
【課題】ワークを対象物に複数の動作で組み付ける場合に、各動作において正常動作中に誤作動することなく過負荷を確実に検出し安全に停止させることができる組立ロボットとその制御方法を提供する。
【解決手段】ワーク1を把持するハンド12と、ハンドに作用する外力を検出する力センサ14と、3次元空間内でハンドの位置と姿勢を移動可能なロボットアーム16と、ロボットアームを制御するロボット制御装置18とを備え、(A)各動作における組付け方向の外力の最大値を記憶し、(B)ロボットアーム16を制御して各動作を順次実行し、(C)各動作の実行中に、力センサ14で検出された組付け方向の外力が、各動作における最大値に達したときに、ロボットアーム16を停止する。
(もっと読む)
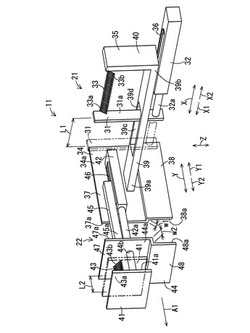
印字ヘッドのコイル自動挿入装置
【課題】コイルを所定の組付け位置に挿入する際に、一旦姿勢補正機構部により挿入姿勢を補正し、所定の組付け位置に挿入するようにした、印字ヘッドのコイル自動挿入装置を提供する。
【解決手段】姿勢補正機構部27は、コイルトレイ載置待機部25のターンテーブル25t、コイル挿入部26のターンテーブル26t間にあって、基台40上に立設された姿勢補正機構部本体27aと、姿勢補正機構部本体27aに弾発的に退避可能に支持されている補正ヘッド27bと、補正ヘッド27bに突設され、作業ロボット30におけるハンド部30bで把持されたコイルを挿入する複数の姿勢補正用案内突起27b1、27b2とを具備する。
(もっと読む)
部品組付け装置および部品組付け方法
【課題】作業スペースを削減するようにした部品組付け装置および部品組付け方法を提供する。
【解決手段】第1部品の検査を行う第1部品検査用回転テーブル14と、第2部品の検査を行う第2部品検査用回転テーブル18と、第1部品に第2部品を組付けて保持可能な部品組付け用回転テーブル22と、検査が完了した第1部品、第2部品を部品組付け用回転テーブル22に供給する第1部品供給手段26、第2部品供給手段28と、第1部品検査用回転テーブル14、第2部品検査用回転テーブル18、部品組付け用回転テーブル22を回転駆動する第1、第2、第3回転駆動手段30,32,34と、第1部品供給手段26、第2部品供給手段28と第1、第2、第3回転駆動手段30,32,34の動作を制御する制御手段40とを備える。
(もっと読む)
自動組立装置および自動組立装置による部品組立方法
【課題】 位相合わせを必要とする部品同士の自動組立において、部品同士の位相が合ったタイミングから挿入が完了するまでの時間の長短に関わらず位相合わせ完了を的確に検知することを課題とする。
【解決手段】 第2の部品を第1の部品に接触させた状態で、第1の部品と第2の部品とを特定の回転軸に対して相対的に回転させつつ、前記回転軸周りのモーメントが予め定められた閾値を超えた場合に回転を終了させる。
(もっと読む)
シールパッキンの取付装置および、そのパッキン付きテープ
【課題】 細長く、軟らかい環状のパッキンを互いに絡み合うことなく整列させ、それを自動的に熱交換器コア15等に供給すること。
【解決手段】 多数のシールパッキン2を長尺なテープ3に剥離可能に接合し、そのテープ3をテープ供給装置4により取付位置に供給する。ついで、剥離・挿入装置5によりテープ3からシールパッキン2を剥離し、それをヘッダープレート1の環状溝1aに挿入する。
(もっと読む)
レンズ保持用ラックおよびレンズ製造方法
【課題】レンズ基材を装着するときに、レンズ基材のレンズ光学面を傷つけるおそれのない作業性に優れたレンズ保持用ラックおよびレンズ製造方法を提供する。
【解決手段】レンズ保持用ラック1は、レンズ基材をレンズ装着位置に位置規制する下方保持部材10、側方回動保持部材20および側方固定保持部材30と、側方回動保持部材を押圧可能な付勢部材22と、を有するレンズ保持ユニットを備える。側方回動保持部材20は、レンズ基材を保持しない状態では、付勢部材22から離間することによりその付勢力を受けることなく、自身の重量のバランスによりレンズ装着位置から外れた待機位置に退避し、レンズ基材を保持する状態では、付勢部材22に接触することによりその付勢力を受けてレンズ基材の外周部に接触する。
(もっと読む)
部品の組立方法および部品の組立装置
【課題】位置合わせと位相合わせとが必要な部品同士の組付け作業を、高度で複雑なセンシング技術を用いることなく、短時間で完了させることを課題とする。
【解決手段】所定の位置および位相にセットされた第1の部品44に、該第1の部品44に対する組付け位置が不定であり且つ該組付け位置に応じた位相でのみ第1の部品44に組付け可能な第2の部品52を組み付ける場合において、第2の部品52の組付け位置Rbを決定し、第2の部品52の組付け位置と第1の部品44の位相と第2の部品52の位相との相関関係に基づいて、組付け位置Rbに応じた第2の部品52の位相Sbを算出し、前記組付け位置Rbにおいて、前記算出された位相Sbで第2の部品52を第1の部品44に組み付ける。
(もっと読む)
自動二輪車の燃料タンク半体の位置決め・把持装置
【課題】自動二輪車の燃料タンク半体を精度良く把持できる位置決め・把持装置を提供することを課題とする。
【解決手段】位置決め・把持装置10は、給油口54を下にしたタンク上半体31の給油口54に嵌る嵌合部55を有し、嵌合部55に給油口54を嵌めて給油口54の三次元的位置を決定する第1治具20と、嵌合部55の放射溝に進入し広がって給油口54を押さえるクランプ機構69を有し、位置決めしたタンク上半体31を把持する第2治具30とを備える。
【効果】給油口を嵌合部に嵌めないで給油口を把持すると、クランプ機構が給油口に当たってタンク上半体が動き、クランプ機構の中心に対し給油口の中心がずれてタンク上半体を精度良く把持できない。本発明では嵌合部55で給油口54を位置決めしてから、クランプ機構69で給油口54を把持するため、タンク上半体31を精度良く把持できる。
(もっと読む)
シャフトとカムロブの組付方法及びその装置
【課題】小スペースでシャフトとカムロブが組付けできる組付方法及びその装置を提供する。
【解決手段】複数のカムロブを載せたパレット80を移動して第一のカムロブ3を準備する工程と、シャフト2の軸芯出しを行いながら両端を保持する工程と、シャフト2の外周に第一の隆起部2aを成形する工程と、パレット80を軸線方向に移動し、パレット80内から第一のカムロブ3を第一の隆起部2aに組付ける工程と、シャフト2の保持を解除しパレット80をシャフト2から取り外し、パレット80を移動して前記複数のカムロブから第二のカムロブを準備する工程と、シャフト2の軸芯出しを行いながら再度両端を保持する工程と、シャフト2の外周に第二の隆起部を成形する工程と、シャフト2の軸線方向の移動を規制した状態で、パレット80を軸線方向に移動し、パレット80内の前記第二のカムロブを前記第二の隆起部に組付ける工程と、を有する。
(もっと読む)
組付け工具
【課題】生産計画の変更に迅速に対応することができ、且つ設備の汎用性を向上させることが可能な組付け工具を提供する。
【解決手段】マシニングセンタ(工作機械)の主軸に装着されて、主軸の回転に連動してクランプ部材3がクランプ又はアンクランプ動作されるように組付け工具1を構成したので、生産計画が変更された場合、組付け部品に対応する組付け工具1を主軸に取り付けるだけで対応することができる。したがって、迅速な対応が可能である。また、設備が組付け専用ではないので、設備に汎用性を持たせることができる。
(もっと読む)
Oリング挿入治具
【課題】Oリングを拡張し均等に押し出すことで捻れなく取付対象箇所に取り付けることができ、且つ、Oリング拡張時の治具との擦れが小さく、取り付け後の捻れ確認・修正を必要としないOリング挿入治具を提供する。
【解決手段】貫通穴20が形成された金属板2と、貫通穴20を貫通すると共にOリング4の内側に挿入され、放射状に移動可能な複数の拡張爪3とを有し、複数の拡張爪3を放射状に移動させることでOリング4を拡張し、複数の拡張爪3を貫通方向に移動させて拡張したOリング4を金属板2に引っ掛けてOリング4を取付対象物5に取り付ける。
(もっと読む)
ワーク処理システム
【課題】一種類のワーク受け装置で多種多様のワークを位置決めし、ワークに対して正確に物理的処理を行う。
【解決手段】基準穴DHが設けられているワークWをクランプするクランパー2と、クランパー2を上下方向に移動させると共に傾斜可能な複数のアクチュエータ3を有するワーク受け装置4と、先端のアーム51にワーク受け装置4のクランパー2にクランプされたワークWに物理的処理を施す処理装置6が固定されている産業用ロボット5と、所定位置に固定されワークWの基準穴DHを撮像する撮像機器7と、処理装置6が処理位置に移動するように産業用ロボット5を制御すると共に、撮像機器7で撮像された基準穴DHの画像を処理して求めた基準穴DHの位置実測値と位置基準値とを比較して、クランパー2にクランプされたワークWの基準穴DHが位置ずれしている場合には、そのずれ方向及びずれ量に応じて処理位置を補正するロボット制御部11とを備える。
(もっと読む)
1 - 20 / 220
[ Back to top ]