
Fターム[3C030BC08]の内容
Fターム[3C030BC08]の下位に属するFターム
ターレットの割出し等による選択使用 (9)
脱着式工具を選択使用 (24)
Fターム[3C030BC08]に分類される特許
1 - 20 / 97
処理装置及び処理装置の操作方法
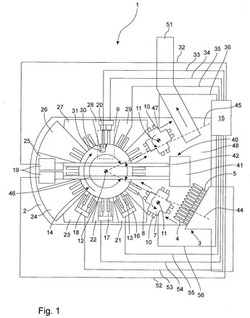
【課題】コンテナブランク用の処理装置を提供する。
【解決手段】処理装置は、機械ベッドと、コンテナブランクを供給するための供給装置と、コンテナブランクを除去するための排出装置と、回転可能に取り付けられた回転式作業台と、半径方向において回転式作業台の反対側に位置する幾つかの操作装置と、少なくとも1つのコンベヤとを備える。コンベヤのコンポーネントマウントは、第2の円セグメント形状の表面セクションに配置され、第2の円セグメント形状の表面セクションは、円軌道セクション形状の搬送路によって規定された第1の表面セクションを補完して、完全な円を描くと規定されている。
(もっと読む)
工作機械用組立装置

【課題】複数個のパーツ同士を組み合わせて工作機械を得るための工作機械用組立装置を、簡素で、しかも、設置・作業スペースを狭小化し得るものとして構成する。
【解決手段】工作機械用組立装置10は、載置台30と、前記載置台30に対して接近又は離間する方向に揺動可能なアーム部材50を有する第1支持機構24と、第2支持機構142とを具備する。載置台30と第2支持機構142の間に配置された第1支持機構24は、アーム部材50が載置台30又は第2支持機構142のいずれかを臨むように回転動作する。さらに、第1支持機構24は、油圧シリンダ42の昇降ロッド44が上昇することに追従して上昇することも可能である。また、第2支持機構142は、案内レール140に案内されながら第1支持機構24に対して接近又は離間する方向に変位する。
(もっと読む)
組付装置及び組付方法
【課題】コンパクトかつ安価な構成で、複数種類の組付部品をワークに組付けることが可能であり、組付部品の組付位置を容易に変更することが可能な、組付装置及び組付方法を提供する。
【解決手段】ワーク送りユニット20と、組付ユニット30と、制御手段41と、を具備する、組付装置10であって、ワーク送りユニット20及び組付ユニット30は、制御手段41から送信される位置情報に基づいて、ワーク送りスライダ22及び組付スライダ33をスライドさせるとともに、組付部35は、組付スライダ33が基部31の側に位置する際に組付部品Pを把持し、組付スライダ33がワークWの側に位置する際に組付部品PをワークWに組付ける。
(もっと読む)
部品組み付け装置及び機械部品の製造方法
【課題】エア源を使用することなく、部品を組み付けることが可能な部品組み付け装置及び機械部品の製造方法を提供する。
【解決手段】第1のアーム12aの先端部に第1のハンド51aを有し、第1のハンド51aを用いて第1の部品を保持する第1のロボット11aと、第2のアーム12bの先端部に第2のハンド51bを有し、第2のハンド51bを用いて第1の部品に組み付けられる第2の部品を保持する第2のロボット11bと、を備え、第1のハンド51bは、第1の部品又は第2の部品を上方から押さえる押さえ部材74を有し、第2のハンド51bは、第2の部品に形成された孔に挿入され、第2の部品を保持する支持ピン55、56を有する。
(もっと読む)
加工システム及び加工方法
【課題】組み付け部品の破損を防止すること。
【解決手段】把持機24が取り付けられたロボット23は、ロアサッシュ32を把持し、当該ロアサッシュ32をドア31まで移動させる。締め付け部25が取り付けられたロボット22は、ボルトをドア31まで移動させ、ドア31及びロアサッシュ32の各々に設けられたボルト穴にボルトを挿入して締め付ける。ロボット制御装置12は、ロボット22,23のうち少なくとも一方の動作の制御として、ロアサッシュ32がドア31に当接した当接状態になった後に、ロアサッシュ32とドア31との所定の関係が一定に保たれる倣い制御、具体的には力覚センサ64により検出される押し付け量が一定に保たれる倣い制御を実行する。
(もっと読む)
作業システム、ロボット装置、機械製品の製造方法
【課題】人手による作業のための既存の作業スペースや作業設備をできるだけ用いながら、ワークに対する作業を精度良く行なうことができるようにした作業システム及びロボット並びに機械製品の製造方法を提供する。
【解決手段】胴部と、胴部に設置され複数の関節部を有する第1アームと、第1のアームと別体に胴部に設置され複数の関節部を有する第2アームと、第1アーム及び第2アームにそれぞれ設けられたハンド部と、を有するロボットにより複数種類のワーク部品のいずれかの種類のワーク部品については第1アーム及び第2アームのハンド部で同時に保持し、残る種類のワーク部品については第1アーム又は第2アームのハンド部で保持搬送する。
(もっと読む)
等速ジョイント用ローラ装着装置
【課題】スパイダのトラニオンに対し、ローラを自動的に装着し得る装置を構成する。
【解決手段】等速ジョイント用ローラ装着装置50は、円環形状体からなる基盤62と、該基盤62の略中心に配置された台座64と、この台座64を三方向から囲繞する3個のローラ保持具66a〜66cと、軸部としての位置合わせ用軸68を有する3個の位置合わせ具70a〜70cとを具備する装着用治具52を有する。ローラ保持具66a〜66c及び位置合わせ具70a〜70cは、台座64(スパイダ16)に対して接近・離間可能である。さらに、位置合わせ具70a〜70cの各々には位置合わせ用軸68が設けられている。この位置合わせ用軸68は、トラニオン28a〜28cの軸線方向に沿って延在し、位置合わせ具70a〜70cが前進動作した際には、ローラ保持具66a〜66cのポケット部96に収容されたローラ30a、30bに通される。
(もっと読む)
双腕ロボット
【課題】汎用性が高く複雑な組立作業ができる双腕ロボットを提供する。
【解決手段】第1アーム1は、第1ハンド2と第1視覚センサ3を有し、第1力センサ4を搭載する。第2アーム5は、第2ハンド6と第2視覚センサ7を有し、第2力センサ8を搭載する。各視覚センサ3、7で鏡筒9及び固定筒10の位置を検出して把持し、中央の組立エリア13に搬送する。フレキ9aの位置を第1視覚センサ3で測定し、フレキ9aを固定筒10の中に通し、固定筒10と鏡筒9を、力センサ4、8の出力を用いた力制御で嵌合して組み立てる。各視覚センサによって検出されたワークの位置座標を、ロボット座標に変換して各ハンドの軌道を計算し、各アームを駆動することで、2つのアームの協調動作を実現する。
(もっと読む)
バルブシート圧入装置
【課題】シリンダヘッドに対するバルブシートの誤圧入を防止することができるバルブシート圧入装置を提供する。
【解決手段】円筒状のバルブシート7を外周に保持可能なパンチ22を備えるバルブシート圧入装置1である。パンチ22は、軸状のホルダ23と、ホルダ23に装着された状態でパンチ22の中心軸線Opに対して径方向外向きに付勢され、バルブシート7を保持するシート保持部Aを構成する爪部材24とを備える。爪部材24のうち、シート保持部Aを構成する突出部24aの外径面24bよりもパンチ22先端側には、バルブシート7の一端部7a側からバルブシート7内周にパンチ22を嵌挿したときにのみ、バルブシート7内周へのパンチ22の嵌挿を規制する規制部Bが設けられる。
(もっと読む)
受渡し装置
【課題】 ナットを締付装置のソケットに確実に位相合せして挿入するナット受渡し装置を提供する。
【解決手段】 ナット16が供回りしないためには、ソケット8とナット16との接触部の摩擦抵抗R1よりもナット16とセット台15との接触部の摩擦抵抗R2の方が大きいことが必要である。このためには、雌テーパ面17の垂直方向に対する角度は14°以下とする。角度が14°以下の雌テーパ面17とすることで、ソケットの下端がナットに当接してもナットがソケットと供回りすることがなく、確実に位相を合せることができる。
(もっと読む)
車両のドアハンドリング治具および車両のドアハンドリング方法
【課題】本発明は、1つの治具で、ドアをドア搬送装置から車体の所定位置に搬送することを可能にする車両のドアハンドリング技術を提供することを課題とする。
【解決手段】車両のドアハンドリング治具20は、治具本体31に傾動自在に設けられドアの下端部36を受ける第1ワーク受け部40と、治具本体31からドアの下方へ挿入可能に設けられ、第1ワーク受け部40が待機位置へ移動されたときに第1ワーク受け部40に代わってドア13を受ける第2ワーク受け部43と、治具本体31に傾動自在に設けられ、ドアの車両長手方向の位置決めをなす長手位置決め部46と、ドアの側部37を車両の幅方向で挟むドアクランプ部51と、ドア13を吸着保持する吸着パッド52と、を備えている。
(もっと読む)
治具用ロボットハンドとこれを用いた治具の取付け/取外し方法
【課題】ワークの位置や姿勢にばらつきがある場合でも、ワークと干渉することなく、ワークに治具を正確に取付け/取外しすることができる治具用ロボットハンドとこれを用いた治具の取付け/取外し方法を提供する。
【解決手段】ワーク1に治具8を取付け/取外しする治具用ロボットハンド10。ワーク1又はこれに固定された固定部材5に設けられた嵌合孔7と嵌合する嵌合部分12bを先端部に有し、嵌合部分12bと嵌合孔7との嵌合により、治具の取付け/取外し方向にその軸線が位置決めされる円筒形のガイドロッド12と、搬送ロボット9のハンド取付部9aに取り付けられ、ガイドロッドの末端部12eをガイドロッドの移動及び揺動に追従可能に保持する追従機構14と、治具8を把持/開放可能な把持装置16と、把持装置をガイドロッドの軸線に沿って昇降させる昇降装置18とを備える。
(もっと読む)
少なくとも2つのサブアセンブリを3次元的に相互に位置合せする装置及びその方法
本発明は、少なくとも2つの大型のサブアセンブリを相互に組付けて1つのアセンブリを構成するために、より具体的には、例えば、少なくとも1つの胴体側面シェル(7、8)、少なくとも1つの胴体上面シェル(12)、少なくとも1つの胴体下面シェル(11)、及び/または、少なくとも1つの胴体床構造体を相互に組付けて航空機の1つの胴体セクションを構成するために、それら少なくとも2つのサブアセンブリを3次元的に相互に位置合せする装置(1)に関する。本装置は、a)各々が1つずつのサブアセンブリを把持する少なくとも2台のポジショニング装置を備えており、より具体的には、例えば、少なくとも2台の胴体側面シェル用ポジショニング装置(2、3)、少なくとも1台の胴体上面シェル用ポジショニング装置(5)、及び/または、少なくとも1台の胴体下面シェル用ポジショニング装置(4)を備えており、b)測定によって複数の測定データを取得するための、より具体的には、例えば、前記複数のサブアセンブリ及び/または前記複数台のポジショニング装置の位置データを取得するための、少なくとも1つの測定装置を備えており、c)少なくとも1つの制御及び/または調節装置(19)を備えており、より具体的には、例えば、少なくとも1つのCNC制御装置(コンピュータ数値制御装置)を備えており、d)少なくとも1つのニューラルネットワーク(20)を備えている。本発明に従って本装置に備えられているニューラルネットワーク(20)は、前記複数台のポジショニング装置を互いに同時に作動させて、短時間で、しかも高精度で前記複数のサブアセンブリの形状を夫々の所与の目標形状にすることを可能にするものである。また、前記制御及び/または調節装置(19)は、それに続いて、前記複数台のサブアセンブリに互いに同時に直線移動操作を行わせて、前記複数のサブアセンブリを相互に位置合せするものである。本発明は更に、複数のサブアセンブリを位置合せする方法に関する。 (もっと読む)
バッテリパックの組み立て設備
【課題】バッテリパックの製造コストおよび重量の低減が図られるバッテリパックの組み立て設備、を提供する。
【解決手段】バッテリパックの組み立て設備は、バッテリスタック50にロアケース61を組み付けるための設備である。組み立て設備は、バッテリスタック50を持ち上げるとともに、バッテリスタック50に対してロアケース61を仮保持するハンガー21と、ハンガー21に設けられ、バッテリスタック50に対してロアケース61を位置決めする位置決め機構31とを有する。
(もっと読む)
組付装置
【課題】ヘッドパイプの両端に形成されたボールレース部に定量のグリース塗布及び所定数のボール装着を確実に行うことができる組付装置を提供する。
【解決手段】ヘッドパイプの両端に形成されたボールレース部にグリースの塗布とボール4の装着を行う組付装置であって、ヘッドパイプの両端を挟持する上ヘッド部5及び下ヘッド部6と、これらのヘッド部5,6に所定数のボール4を配列して保持するボール供給手段7と、ボールレース部近傍に定量のグリースを各ヘッド部5,6より吐出するグリース圧送手段8と、このグリース圧送手段8により吐出したグリースをボール供給手段7により配列保持されたボール4で押し出すと共に、これらのボール4とグリースをヘッドパイプ両端のボールレース部に装着するボール圧送手段9を備えた。
(もっと読む)
ワーク組付装置およびワーク組付方法
【課題】簡素な構成でワークを被組付部に位置決めできるワーク組付装置を提供すること。
【解決手段】サイドエアバッグ取付装置は、ピン挿通孔が形成されたサイドエアバッグを保持して、ピン挿入穴が形成されたサイドエアバッグ組付部に組み付ける。このサイドエアバッグ取付装置は、ハンド本体51およびこのハンド本体51に設けられた複数のワーク保持装置52を有するハンド50と、ハンド50の姿勢および3次元空間における位置を変化させるロボットアーム41と、これらを制御する制御装置と、を備える。ワーク保持装置52は、筒状のシリンダ53と、このシリンダ53に摺動可能に設けられて、先端がピン形状でありかつ基端側に磁力を有するボス部551が形成されたピン部材55と、ハンド本体51に設けられてシリンダ53をフローティング自在に支持するシリンダ支持部54と、を備える。
(もっと読む)
ワーク組付方法およびワーク組付システム
【課題】被組付部をセンシングする回数を低減できるワーク組付方法を提供すること。
【解決手段】ワーク組付方法は、サイドエアバッグ組付部にサイドエアバッグを配置し、ねじを用いて、このサイドエアバッグをサイドエアバッグ組付部に固定する。このワーク組付方法は、サイドエアバッグ組付部に近接する部分に設けた3つの測定点を撮影する撮影工程と、この撮影した画像に基づいて、測定点の実際の位置A1〜C1を算出する位置算出工程と、この位置算出工程で算出した測定点の実際の位置A1〜C1に基づいて、サイドエアバッグとサイドエアバッグ組付部との相関位置を算出して位置決めする第1位置決め工程と、位置算出工程で算出した測定点の実際の位置A1〜C1に基づいて、ねじとサイドエアバッグ組付部との相関位置を算出して位置決めする第2位置決め工程と、を備える。
(もっと読む)
ワーク把持装置およびワーク把持方法
【課題】基準孔が形成されたワークについて、当該ワークの基準孔を回転中心とする回転方向の位相を保持できるワーク把持装置を提供すること。
【解決手段】把持装置30は、挿通孔111が形成された右フォーク11Aを把持する。この把持装置30は、基部31と、この基部31から延びる棒状の把持部40と、基部31に設けられた複数の棒状の係止部材524と、を備える。把持部40は、挿通孔111に挿入されてこの挿通孔111を把持し、複数の係止部材524は、把持部40から所定間隔離れて略平行に整列して設けられ、かつ、延出方向に移動可能である。
(もっと読む)
シリンジ組立装置
【課題】バレルの中のガスケットにプランジャロッドをねじ込むに際し、ねじ込みを最後まで確実に遂行することができるシリンジ組立装置を提供する。
【解決手段】バレル支持装置22は、バレル101を、軸線を垂直にし、且つプランジャロッド106が挿入される開口部を上に向けた状態で回転可能に支持する。プランジャロッド支持装置26のチャック29は、プランジャロッド106を、当該プランジャロッドの軸線まわり回転と軸線方向の滑りの両方を止める第1挟み付け態勢で挟んでバレル101に挿入した後、当該プランジャロッドの軸線回り回転は止めるが軸線方向の滑りは止めない第2挟み付け態勢に転ずる。荷重付与装置35の質量でプランジャロッド106に軸線方向下向きの荷重をかけておいて、回転付与装置60により、ガスケット104とプランジャロッド106のねじ込みが行われる方向の回転をバレル101に与える。
(もっと読む)
部品取付けロボット及び部品取付け装置
【課題】金属粉対策を講じた部品取付け装置を提供することを課題とする。
【解決手段】部品取付け装置10では、部品保持治具16の保持部71の近傍に、ボルト203をねじ込むためにナット199のねじ穴207に向けてエア205を供給するエア噴出し口90と、ナット201のねじ穴に向けてエア206を供給するエア噴出し口100とが設けられている。
【効果】ボルト203のねじ込み前にねじ穴207に金属粉208が付着していた場合であっても、第1エア噴出し口90からエア205を噴出し、金属粉208を除去する。すなわち、本発明によれば、金属粉対策を講じた部品取付け装置10が提供される。
(もっと読む)
1 - 20 / 97
[ Back to top ]